Das könnte Ihnen auch gefallen
- Análisis Del AceiteDokument5 SeitenAnálisis Del AceiteEdlyn RamirezNoch keine Bewertungen
- Análisis Del AceiteDokument5 SeitenAnálisis Del AceiteEdlyn RamirezNoch keine Bewertungen
- Sistema ScadaDokument3 SeitenSistema ScadaEdlyn RamirezNoch keine Bewertungen
- Ejemplos Lazo Abierto y CerradoDokument2 SeitenEjemplos Lazo Abierto y CerradoEdlyn Ramirez100% (1)
- Sistemas de ControlDokument5 SeitenSistemas de ControlEdlyn RamirezNoch keine Bewertungen
- AmefDokument12 SeitenAmefEdlyn RamirezNoch keine Bewertungen
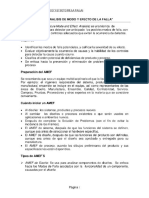
- Información Técnica para Análisis de CausasDokument4 SeitenInformación Técnica para Análisis de CausasEdlyn RamirezNoch keine Bewertungen
- Principios de InstrumentacionDokument44 SeitenPrincipios de InstrumentacionAnonymous kK5MowLohNoch keine Bewertungen
- Sistema de Control Lazo Cerrado de Un CoolerDokument18 SeitenSistema de Control Lazo Cerrado de Un CoolerJose Ignacio Gonzalez BeltramoNoch keine Bewertungen
- PssDokument13 SeitenPssOmar Ramirez PrietoNoch keine Bewertungen
- Informe Final n3 Sistemas de Control 2Dokument9 SeitenInforme Final n3 Sistemas de Control 2Therion456Noch keine Bewertungen
- Lab 2 ControlDokument7 SeitenLab 2 ControlJeanCarlosMorenoNoch keine Bewertungen
- MEC 284 C01 IntroducciónDokument50 SeitenMEC 284 C01 IntroducciónCarlos CastilloNoch keine Bewertungen
- SC Clase03Dokument29 SeitenSC Clase03AngelNoch keine Bewertungen
- Control en Enfermeria y SaludDokument46 SeitenControl en Enfermeria y SaludShirly Guzman62% (13)
- Plan Estudios 1320161 PDFDokument9 SeitenPlan Estudios 1320161 PDFEricson ViaNoch keine Bewertungen
- Propuesta de Proyecto para La Materia de Control ClásicoDokument2 SeitenPropuesta de Proyecto para La Materia de Control ClásicoRubén XolalpaNoch keine Bewertungen
- Auditoria ImprimirborradorDokument263 SeitenAuditoria ImprimirborradorUrbano AlvaradoNoch keine Bewertungen
- 03 - Sistemas de Control NeumaticosDokument36 Seiten03 - Sistemas de Control Neumaticosdanielh776Noch keine Bewertungen
- Guía Examen Instrumentación-2Dokument4 SeitenGuía Examen Instrumentación-2Alexis Espino AvilaNoch keine Bewertungen
- Exa 2002Dokument2 SeitenExa 2002Paul Fernando Urzola NuñezNoch keine Bewertungen
- Fase 6 Grupo16 JuanAlejandroVelasquezDokument9 SeitenFase 6 Grupo16 JuanAlejandroVelasquezJuan Alejandro Velasquez LopezNoch keine Bewertungen
- Recopilación Complementos de FlotaciónDokument45 SeitenRecopilación Complementos de Flotaciónlapmineo100% (2)
- Universidad Nacional de IngenieríaDokument26 SeitenUniversidad Nacional de IngenieríaMartha Izaguirre VillaNoch keine Bewertungen
- Tema 1. Accionamientos Electricos PDFDokument41 SeitenTema 1. Accionamientos Electricos PDFAlejandro Fernández RoldánNoch keine Bewertungen
- El Ejemplo de Un Proceso Integrativo Que Hemos UsadoDokument3 SeitenEl Ejemplo de Un Proceso Integrativo Que Hemos UsadoPablo Montes VegaNoch keine Bewertungen
- 2 - Etapa - 3Dokument35 Seiten2 - Etapa - 3Juan David EcheverryNoch keine Bewertungen
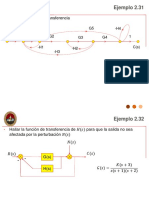
- Funcion de TransferenciaDokument21 SeitenFuncion de TransferenciaHenry MontenegroNoch keine Bewertungen
- Informe Control PIDDokument20 SeitenInforme Control PIDJackson Jorge M100% (1)
- Control A Los Sistemas Péndulo Invertido y Grua ViajeraDokument21 SeitenControl A Los Sistemas Péndulo Invertido y Grua ViajeraMarcos InfanteNoch keine Bewertungen
- Trabajo Practico #3: Sistemas de Control y ServiciosDokument11 SeitenTrabajo Practico #3: Sistemas de Control y ServiciosemygutNoch keine Bewertungen
- Control de Procesos - Control AnticipativoDokument14 SeitenControl de Procesos - Control AnticipativoYuselys SaavedraNoch keine Bewertungen
- Importancia de La MedicionDokument10 SeitenImportancia de La MedicionEnrique RodriguezNoch keine Bewertungen
- Temario Instrumentación de Procesos 2Dokument6 SeitenTemario Instrumentación de Procesos 2DanielaNoch keine Bewertungen
- Diagramas de BloquesDokument5 SeitenDiagramas de BloquesHarrisonBorjaMartinezNoch keine Bewertungen
- Ee-642 Control NumericoDokument2 SeitenEe-642 Control NumericoJuan Carlos Álvarez Salazar0% (1)
- Guia de Los Objetivos de La UNEFADokument3 SeitenGuia de Los Objetivos de La UNEFAluisa borregoNoch keine Bewertungen