Das könnte Ihnen auch gefallen
- CG Viva+questions+&ANSWERSDokument13 SeitenCG Viva+questions+&ANSWERSJinsKJoy75% (4)
- GG Map Cheat SheetDokument2 SeitenGG Map Cheat SheetHarshini MohanNoch keine Bewertungen
- Chapter 1Dokument27 SeitenChapter 1Mainul Islam 312Noch keine Bewertungen
- Matrix of Curriculum Standards (Competencies), With Corresponding Recommended Flexible Learning Delivery Mode and Materials Per Grading PeriodDokument5 SeitenMatrix of Curriculum Standards (Competencies), With Corresponding Recommended Flexible Learning Delivery Mode and Materials Per Grading PeriodLaivey Ligan Luig Lemeric100% (4)
- Plotting On Google Static Maps in R: Markus Loecher Sense Networks December 13, 2010Dokument7 SeitenPlotting On Google Static Maps in R: Markus Loecher Sense Networks December 13, 2010Phellipe CruzNoch keine Bewertungen
- Density - Contour PlotDokument18 SeitenDensity - Contour Plotkidal14Noch keine Bewertungen
- SLamDokument10 SeitenSLamNguyen TranNoch keine Bewertungen
- Using Mapping Tools in MATLABDokument22 SeitenUsing Mapping Tools in MATLABوجدي بلخيريةNoch keine Bewertungen
- Paper DviDokument7 SeitenPaper DvijefferyleclercNoch keine Bewertungen
- A Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingDokument8 SeitenA Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingjayachandradbzNoch keine Bewertungen
- Uncertainty Analysis For Optimum Plane Extraction From Noisy 3D Range-Sensor Point-CloudsDokument14 SeitenUncertainty Analysis For Optimum Plane Extraction From Noisy 3D Range-Sensor Point-CloudsIan MedeirosNoch keine Bewertungen
- Parth and Danny Robotics AIDokument6 SeitenParth and Danny Robotics AIParth Pankaj TiwaryNoch keine Bewertungen
- A Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingDokument8 SeitenA Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingVishalParekhNoch keine Bewertungen
- Real-Time Loop Closure in 2D LIDAR SLAM: Wolfgang Hess, Damon Kohler, Holger Rapp, Daniel AndorDokument8 SeitenReal-Time Loop Closure in 2D LIDAR SLAM: Wolfgang Hess, Damon Kohler, Holger Rapp, Daniel AndorMayuresh SarodeNoch keine Bewertungen
- Dar Unit-4Dokument23 SeitenDar Unit-4Kalyan VarmaNoch keine Bewertungen
- Information-Theoretic Mapping Using Cauchy-Schwarz Quadratic Mutual InformationDokument8 SeitenInformation-Theoretic Mapping Using Cauchy-Schwarz Quadratic Mutual InformationhenrydclNoch keine Bewertungen
- Integrating Grid Graphics Output With Base Graphics OutputDokument12 SeitenIntegrating Grid Graphics Output With Base Graphics OutputBustami Muhammad SidikNoch keine Bewertungen
- Implementation of Informed RRT - On A Pre-Mapped Octomap Generated by RTAB MapDokument9 SeitenImplementation of Informed RRT - On A Pre-Mapped Octomap Generated by RTAB MapMuhammad AdhipatiunusNoch keine Bewertungen
- DSCD A3Dokument10 SeitenDSCD A3Gurmehak kaurNoch keine Bewertungen
- AD3301 - Unit II - Part 1 .Ipynb - ColaboratoryDokument9 SeitenAD3301 - Unit II - Part 1 .Ipynb - Colaboratorypalaniappan.cseNoch keine Bewertungen
- 82.2.-TopoShaper - Isocontour APIDokument4 Seiten82.2.-TopoShaper - Isocontour APIGrupo ByrNoch keine Bewertungen
- Map Making From TablesDokument7 SeitenMap Making From TablesijcgaNoch keine Bewertungen
- 3D Localization, Mapping and Path Planning For Search and Rescue OperationsDokument3 Seiten3D Localization, Mapping and Path Planning For Search and Rescue OperationsbookeepaNoch keine Bewertungen
- AD3301 - Visualization - Ipynb - ColaboratoryDokument15 SeitenAD3301 - Visualization - Ipynb - Colaboratorypalaniappan.cseNoch keine Bewertungen
- RBE - 3002 - Lab - 4 ReportDokument7 SeitenRBE - 3002 - Lab - 4 ReportZachary RiverniderNoch keine Bewertungen
- Richter ISRR13Dokument16 SeitenRichter ISRR13AmanNoch keine Bewertungen
- Android Google Maps Tutorial Part 7, Drawing A Path or Line Between Two LocationsDokument17 SeitenAndroid Google Maps Tutorial Part 7, Drawing A Path or Line Between Two LocationsFrancisco FeitosaNoch keine Bewertungen
- Lec 16-19 Ch4 Matplotlib Part1Dokument65 SeitenLec 16-19 Ch4 Matplotlib Part1MAryam KhanNoch keine Bewertungen
- Xiao Chen, Parking Occupancy Prediction and Pattern AnalysisDokument5 SeitenXiao Chen, Parking Occupancy Prediction and Pattern AnalysisParth SonkhiaNoch keine Bewertungen
- MapInfo FunctionsDokument17 SeitenMapInfo FunctionsYasir100% (1)
- Richter 2016Dokument18 SeitenRichter 2016Dedy BehiNoch keine Bewertungen
- Data Visualization Using MatplotlibDokument30 SeitenData Visualization Using MatplotlibSureshNoch keine Bewertungen
- Krishnan DEM MRDokument8 SeitenKrishnan DEM MRxico107Noch keine Bewertungen
- Modeling For Landslide Hazard and Risk AssessmentDokument10 SeitenModeling For Landslide Hazard and Risk AssessmentAsma HashmiNoch keine Bewertungen
- Simultaneous Localization and Mapping of Mobile Robot With Research and ImplementationDokument4 SeitenSimultaneous Localization and Mapping of Mobile Robot With Research and ImplementationAhmad KhanNoch keine Bewertungen
- Paperiros SRT HDokument6 SeitenPaperiros SRT HKiki Riki MikiNoch keine Bewertungen
- Introduction GM FuncionsDokument7 SeitenIntroduction GM FuncionsGOWRISHANKAR SJNoch keine Bewertungen
- Processing (36/381) : StructureDokument23 SeitenProcessing (36/381) : StructureJoaquim Camps GarrigaNoch keine Bewertungen
- Saveetha Institute of Medical and Technical Sciences: Unit V Plotting and Regression Analysis in RDokument63 SeitenSaveetha Institute of Medical and Technical Sciences: Unit V Plotting and Regression Analysis in RMuzakir Laikh KhanNoch keine Bewertungen
- School of Computer Science and Engineering Winter Session 2020-21Dokument45 SeitenSchool of Computer Science and Engineering Winter Session 2020-21Priyanshu MishraNoch keine Bewertungen
- Distance Vector Routing and Link State Routing: Expt No:7 DATE:28/06/2021Dokument15 SeitenDistance Vector Routing and Link State Routing: Expt No:7 DATE:28/06/2021gayathriNoch keine Bewertungen
- Computer Graphics Lab ManualDokument69 SeitenComputer Graphics Lab ManualShahnawaz Husain50% (2)
- Unit V Data VisualizationDokument49 SeitenUnit V Data VisualizationnirmalampNoch keine Bewertungen
- Viewports and Clipping (Direct3D 9) - Win32 Apps - Microsoft LearnDokument6 SeitenViewports and Clipping (Direct3D 9) - Win32 Apps - Microsoft Learnciuciu.denis.2023Noch keine Bewertungen
- Hack 74. Plot Wireless Network Viewsheds With GRASS: 6.12.1. Loading The Terrain Into GRASSDokument9 SeitenHack 74. Plot Wireless Network Viewsheds With GRASS: 6.12.1. Loading The Terrain Into GRASSJoao LopesNoch keine Bewertungen
- Python - Creating Plots: C Corr S Msize Cmap Norm Edgecolor None Marker SDokument50 SeitenPython - Creating Plots: C Corr S Msize Cmap Norm Edgecolor None Marker SOscard KanaNoch keine Bewertungen
- 04.02-Simple-Scatter-Plots - Ipynb - ColaboratoryDokument7 Seiten04.02-Simple-Scatter-Plots - Ipynb - Colaboratoryvvaswincode11Noch keine Bewertungen
- Multi-Robot Mapping and Navigation Using Topological FeaturesDokument6 SeitenMulti-Robot Mapping and Navigation Using Topological FeaturesSiddharth UNoch keine Bewertungen
- International Journal of Engineering Research and Development (IJERD)Dokument11 SeitenInternational Journal of Engineering Research and Development (IJERD)IJERDNoch keine Bewertungen
- Hoang 2017Dokument12 SeitenHoang 2017Luis Martínez RamírezNoch keine Bewertungen
- RoboticsDokument9 SeitenRoboticsKrishna Prakash NanduriNoch keine Bewertungen
- Response To Editor and Reviewers' Comments of Manuscript ID WCL2021-0543Dokument18 SeitenResponse To Editor and Reviewers' Comments of Manuscript ID WCL2021-0543Sandeep Kumar SinghNoch keine Bewertungen
- Unit 5Dokument27 SeitenUnit 5jai geraNoch keine Bewertungen
- Real-Time Radar SLAM: 11. Workshop Fahrerassistenzsysteme Und Automatisiertes FahrenDokument10 SeitenReal-Time Radar SLAM: 11. Workshop Fahrerassistenzsysteme Und Automatisiertes FahrenAsmaa HassanNoch keine Bewertungen
- 22MSM40206 Data VisualisationDokument13 Seiten22MSM40206 Data Visualisationhejoj76652Noch keine Bewertungen
- Chapter 2Dokument53 SeitenChapter 2Abrham EnjireNoch keine Bewertungen
- Experiment No. 3 Aim: Draw A Line, Triangle and Circle Using Functions of Header File. DescriptionDokument19 SeitenExperiment No. 3 Aim: Draw A Line, Triangle and Circle Using Functions of Header File. DescriptionBestOFBestNoch keine Bewertungen
- Problem Statement: Using MATLAB For STK AutomationDokument10 SeitenProblem Statement: Using MATLAB For STK Automation陈爱军Noch keine Bewertungen
- PML Ex3 FinalDokument20 SeitenPML Ex3 FinalJasmitha BNoch keine Bewertungen
- Line Drawing Algorithm: Mastering Techniques for Precision Image RenderingVon EverandLine Drawing Algorithm: Mastering Techniques for Precision Image RenderingNoch keine Bewertungen
- Heightmap: Exploring Terrain Representation through Computer VisionVon EverandHeightmap: Exploring Terrain Representation through Computer VisionNoch keine Bewertungen
- Blank 17Dokument1 SeiteBlank 17tdit84Noch keine Bewertungen
- StoryDokument2 SeitenStorytdit84Noch keine Bewertungen
- NotesDokument1 SeiteNotestdit84Noch keine Bewertungen
- Blank 15Dokument2 SeitenBlank 15tdit84Noch keine Bewertungen
- Rock Hard PlaceDokument1 SeiteRock Hard Placetdit84Noch keine Bewertungen
- Donut NoteDokument1 SeiteDonut Notetdit84Noch keine Bewertungen
- CVC List: Short A: - Ad - Ag - An - Ap - at OtherDokument5 SeitenCVC List: Short A: - Ad - Ag - An - Ap - at Othertdit84100% (1)
- Path Following For A Differential Drive Robot - MATLAB & Simulink ExampleDokument8 SeitenPath Following For A Differential Drive Robot - MATLAB & Simulink Exampletdit84Noch keine Bewertungen
- Report - Design of A Personal Aerial VehicleDokument86 SeitenReport - Design of A Personal Aerial Vehicletdit84Noch keine Bewertungen
- Wing MomentDokument2 SeitenWing Momenttdit84Noch keine Bewertungen
- Model Aircraft Structure ArticleDokument18 SeitenModel Aircraft Structure Articletdit84Noch keine Bewertungen
- Modeling Inverse Kinematics in A Robotic Arm - MATLAB & Simulink ExampleDokument5 SeitenModeling Inverse Kinematics in A Robotic Arm - MATLAB & Simulink Exampletdit84Noch keine Bewertungen
- MATLAB Answers: Is It Possible To Use Serial Communication With Arduino Thanks To A Baudrate Upper Than 9600 ?Dokument5 SeitenMATLAB Answers: Is It Possible To Use Serial Communication With Arduino Thanks To A Baudrate Upper Than 9600 ?tdit84Noch keine Bewertungen
- Design and Performance of A Hang Glider: The School of Mechanical EngineeringDokument36 SeitenDesign and Performance of A Hang Glider: The School of Mechanical Engineeringtdit84Noch keine Bewertungen
- 1-D Meshing: 5.1 When To Use 1-D ElementsDokument1 Seite1-D Meshing: 5.1 When To Use 1-D Elementstdit84Noch keine Bewertungen
- Assignment EKC 245 PDFDokument8 SeitenAssignment EKC 245 PDFLyana SabrinaNoch keine Bewertungen
- Random Number GenerationDokument35 SeitenRandom Number GenerationLuis IglesiasNoch keine Bewertungen
- Mathematics Csee 1998Dokument2 SeitenMathematics Csee 1998Estar KaitelNoch keine Bewertungen
- Module 1Dokument79 SeitenModule 1Dhinesh TNoch keine Bewertungen
- Basic Business Statistics: 12 EditionDokument35 SeitenBasic Business Statistics: 12 EditionMustakim Mehmud TohaNoch keine Bewertungen
- Business Mathematics ModuleDokument79 SeitenBusiness Mathematics ModuleGianina De Leon100% (1)
- Floyd WarshallDokument6 SeitenFloyd WarshallciaoasdasdNoch keine Bewertungen
- Chapter 4 InterpolationDokument14 SeitenChapter 4 InterpolationUmair Ali RajputNoch keine Bewertungen
- Sheet Metal Forming - 2Dokument3 SeitenSheet Metal Forming - 2HasanBadjrieNoch keine Bewertungen
- Numerical Analysis - IIDokument158 SeitenNumerical Analysis - IIParveen SabirNoch keine Bewertungen
- Functions, Limits and Continuity: X G F X G X FDokument5 SeitenFunctions, Limits and Continuity: X G F X G X FKenny KenNoch keine Bewertungen
- Ma 2001Dokument13 SeitenMa 2001Suraj ParmekarNoch keine Bewertungen
- Mathematics KSSM Form 3: Chapter 9:straight LinesDokument13 SeitenMathematics KSSM Form 3: Chapter 9:straight LinesNUR RAIHAN BINTI ABDUL RAHIM MoeNoch keine Bewertungen
- Mad111 Chap 4Dokument145 SeitenMad111 Chap 4Minh VuNoch keine Bewertungen
- 2.markov ChaainsDokument17 Seiten2.markov ChaainssandyNoch keine Bewertungen
- Pathway Areas: School of Computer Science and EngineeringDokument31 SeitenPathway Areas: School of Computer Science and EngineeringnighatNoch keine Bewertungen
- HW3 2023Dokument3 SeitenHW3 2023BlooD LOVERNoch keine Bewertungen
- Math 9-Q1-Week-2Dokument12 SeitenMath 9-Q1-Week-2nolan ryan alas-asNoch keine Bewertungen
- 20 03 2023 - 317709 PDFDokument3 Seiten20 03 2023 - 317709 PDFGODALA VIVIAN REEVE DPSN-STDNoch keine Bewertungen
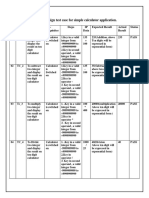
- Experiment No .3-Design Test Case For Simple Calculator ApplicationDokument2 SeitenExperiment No .3-Design Test Case For Simple Calculator ApplicationAbrar NadafNoch keine Bewertungen
- Plane and Solid Review Module Nov2020finalDokument2 SeitenPlane and Solid Review Module Nov2020finalrhodel cosyeloNoch keine Bewertungen
- Name: - ScoreDokument5 SeitenName: - ScoreWemn JuniofNoch keine Bewertungen
- FINDING THE VERTEX FOCUS AND DirectriX OF ADokument19 SeitenFINDING THE VERTEX FOCUS AND DirectriX OF AJordan Abosama MamalumpongNoch keine Bewertungen
- Determinants - DPP 01 (Of Lec 02) - Lakshya JEE 2.0 2024Dokument3 SeitenDeterminants - DPP 01 (Of Lec 02) - Lakshya JEE 2.0 2024Apurv ChitranshNoch keine Bewertungen
- 1429Dokument4 Seiten1429unique qualityNoch keine Bewertungen
- Maths 30Dokument11 SeitenMaths 30BenNoch keine Bewertungen
- Y6 Autumn Block 1 WO6 Compare and Order Any Integers 2022Dokument2 SeitenY6 Autumn Block 1 WO6 Compare and Order Any Integers 2022M alfyNoch keine Bewertungen
- COE0001 Lecture8studentsDokument28 SeitenCOE0001 Lecture8studentsVal LasNoch keine Bewertungen