Das könnte Ihnen auch gefallen
- Sample Problem #22Dokument8 SeitenSample Problem #22Dozdi0% (1)
- Carregadeira LiebherrDokument17 SeitenCarregadeira Liebherrsanches pita100% (5)
- Architectural ConcreteDokument24 SeitenArchitectural ConcreteSaud PathiranaNoch keine Bewertungen
- Explanation of Maxon EC Motor TerminologyDokument1 SeiteExplanation of Maxon EC Motor TerminologyfurkanfurkanfurkanNoch keine Bewertungen
- For Terminology Maxon ECX: ExplanationDokument1 SeiteFor Terminology Maxon ECX: ExplanationDeya OstriaNoch keine Bewertungen
- Coupling Selection DIN740 Specific FactorsDokument4 SeitenCoupling Selection DIN740 Specific FactorsHoussem MechichiNoch keine Bewertungen
- Maxon EC60 400wattDokument1 SeiteMaxon EC60 400wattElectromateNoch keine Bewertungen
- Lect - 39 - 40 - Power Electronic Control of IM MotorsDokument18 SeitenLect - 39 - 40 - Power Electronic Control of IM MotorsVishal MeghwarNoch keine Bewertungen
- SMMA Motor GlossaryDokument11 SeitenSMMA Motor GlossaryNurulHardyNoch keine Bewertungen
- Maxon RE25 Precious Metal Brushes 10wattDokument1 SeiteMaxon RE25 Precious Metal Brushes 10wattElectromateNoch keine Bewertungen
- PMdrives Part2Dokument24 SeitenPMdrives Part2leo232Noch keine Bewertungen
- Energy Conversion One: INDUCTION MOTORS (Maximum Torque )Dokument83 SeitenEnergy Conversion One: INDUCTION MOTORS (Maximum Torque )bilalNoch keine Bewertungen
- SMC For Pitch Angle of A Variable Speed PMSG-wind Turbine Considering Actuator DynamicsDokument5 SeitenSMC For Pitch Angle of A Variable Speed PMSG-wind Turbine Considering Actuator DynamicsDuyên Nguyễn NgọcNoch keine Bewertungen
- Maxon A-Max26 Precious Metal Brushes 7wattDokument1 SeiteMaxon A-Max26 Precious Metal Brushes 7wattElectromateNoch keine Bewertungen
- Web Motor GlossaryDokument7 SeitenWeb Motor GlossaryansabhiNoch keine Bewertungen
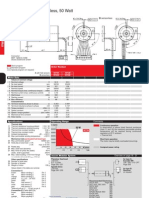
- Maxon EC-Max40 70wattDokument1 SeiteMaxon EC-Max40 70wattElectromateNoch keine Bewertungen
- RE50Dokument1 SeiteRE50Yhony Gamarra VargasNoch keine Bewertungen
- Motores PDFDokument1 SeiteMotores PDFJorge Alejandro Barrutia BorbollaNoch keine Bewertungen
- Lecture Note - ED - Speed Control of IMDokument5 SeitenLecture Note - ED - Speed Control of IMsashaikhNoch keine Bewertungen
- Catalog Motor EC90Flat 323772Dokument1 SeiteCatalog Motor EC90Flat 323772Lucas SuplinoNoch keine Bewertungen
- Maxon EC90 Flat 90wattDokument1 SeiteMaxon EC90 Flat 90wattElectromateNoch keine Bewertungen
- Rydon JawcouplingDokument18 SeitenRydon JawcouplingMahesh Daxini ThakkerNoch keine Bewertungen
- Generator ReactancesDokument3 SeitenGenerator ReactancesLora BishopNoch keine Bewertungen
- 30 MM, Graphite Brushes, 60 Watt: Order NumberDokument1 Seite30 MM, Graphite Brushes, 60 Watt: Order NumberRatanieriNoch keine Bewertungen
- 81 PDFDokument1 Seite81 PDFRatanieriNoch keine Bewertungen
- RE 25 25 MM, Precious Metal Brushes CLL, 10 Watt: Part NumbersDokument1 SeiteRE 25 25 MM, Precious Metal Brushes CLL, 10 Watt: Part NumbersWALTER ANDRES CORDOBA CACERENoch keine Bewertungen
- Maxon EC-Max30 40wattDokument1 SeiteMaxon EC-Max30 40wattElectromateNoch keine Bewertungen
- Maxon EC6 1.2wattDokument1 SeiteMaxon EC6 1.2wattElectromateNoch keine Bewertungen
- Asset-V1 BuX+EEE321+2021 Summer+Type@Asset+Block@Power Angle CurveDokument10 SeitenAsset-V1 BuX+EEE321+2021 Summer+Type@Asset+Block@Power Angle CurveAbrar ChowdhuryNoch keine Bewertungen
- CYCLE-2:Experiment 1 Steady-State Performance of A 3-Phase Induction MotorDokument32 SeitenCYCLE-2:Experiment 1 Steady-State Performance of A 3-Phase Induction MotorSumit SinghNoch keine Bewertungen
- Week 9a LecturesDokument25 SeitenWeek 9a LecturesAMMARSAALIM KHANNoch keine Bewertungen
- En 21 250Dokument1 SeiteEn 21 250compimagmaticNoch keine Bewertungen
- Half Wave Controlled Rectifier: Experiment 1Dokument17 SeitenHalf Wave Controlled Rectifier: Experiment 1Muhammad HasnainNoch keine Bewertungen
- Half Wave Controlled Rectifier: Experiment 1Dokument17 SeitenHalf Wave Controlled Rectifier: Experiment 1Noona MigleiNoch keine Bewertungen
- Marine Standards IACSDokument8 SeitenMarine Standards IACSAbhinav OjhaNoch keine Bewertungen
- En 21 242Dokument1 SeiteEn 21 242Zoltán SoósNoch keine Bewertungen
- State of TDokument16 SeitenState of TjoeNoch keine Bewertungen
- EC 40 40 MM, Brushless, 170 Watt: Part NumbersDokument1 SeiteEC 40 40 MM, Brushless, 170 Watt: Part NumbersfurkanfurkanfurkanNoch keine Bewertungen
- MSFO-1255: W210 Switchgear Design Department 5,000 Teu Class Container CarrierDokument31 SeitenMSFO-1255: W210 Switchgear Design Department 5,000 Teu Class Container CarrierАлексей ПетренкоNoch keine Bewertungen
- Maxon RE30 Graphite Brushes 60wattDokument1 SeiteMaxon RE30 Graphite Brushes 60wattElectromateNoch keine Bewertungen
- Guide To CPA Brake Resistors and Brake ChoppersDokument9 SeitenGuide To CPA Brake Resistors and Brake ChoppersXonFaxonNoch keine Bewertungen
- Clarifying Current Values and Naming For Celera Motion S Ingenia DrivesDokument8 SeitenClarifying Current Values and Naming For Celera Motion S Ingenia DrivesflynlowNoch keine Bewertungen
- BLDC Motor Ø8 MM: ECX SPEED 8 M BrushlessDokument1 SeiteBLDC Motor Ø8 MM: ECX SPEED 8 M BrushlessVinsen Teubun LetsoinNoch keine Bewertungen
- Maxon RE50 Graphite Brushes 200wattDokument1 SeiteMaxon RE50 Graphite Brushes 200wattElectromateNoch keine Bewertungen
- High-Performance Adaptive Torque Control For An IPMSM With Real-Time MTPA OperationDokument11 SeitenHigh-Performance Adaptive Torque Control For An IPMSM With Real-Time MTPA Operationalaref elhajNoch keine Bewertungen
- MAXON Brushed Motor A-Max 26, 4.5 WDokument1 SeiteMAXON Brushed Motor A-Max 26, 4.5 WRadu BabauNoch keine Bewertungen
- Maxon EC22 50wattDokument1 SeiteMaxon EC22 50wattElectromateNoch keine Bewertungen
- EC - Max 30 30 MM, Brushless, 60 Watt: Part NumbersDokument1 SeiteEC - Max 30 30 MM, Brushless, 60 Watt: Part NumbersfurkanfurkanfurkanNoch keine Bewertungen
- ELE 2117 Lesson 11Dokument42 SeitenELE 2117 Lesson 11elioNoch keine Bewertungen
- 3 Phase Slip Ring Inductionmotor LoadtestDokument9 Seiten3 Phase Slip Ring Inductionmotor LoadtestBhatia AdvancedNoch keine Bewertungen
- Maxon EC-Powermax30 200wattDokument1 SeiteMaxon EC-Powermax30 200wattElectromateNoch keine Bewertungen
- METHODOLOGYDokument14 SeitenMETHODOLOGYKipkirui YegoNoch keine Bewertungen
- MAXON BLDC As GeneratorsDokument14 SeitenMAXON BLDC As GeneratorsRadu BabauNoch keine Bewertungen
- Maxon RE-Max17 Graphite Brushes 4.5wattDokument2 SeitenMaxon RE-Max17 Graphite Brushes 4.5wattElectromateNoch keine Bewertungen
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesVon EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkVon EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNoch keine Bewertungen
- Mechanical Science for Technicians: Volume 1Von EverandMechanical Science for Technicians: Volume 1Bewertung: 5 von 5 Sternen5/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- Bioavailability - of MGDokument13 SeitenBioavailability - of MGRatanieriNoch keine Bewertungen
- Astronaut and Physician Michael R. Barratt M.D.,M.S. (Auth.), Astronaut and Physician Michael R. Barratt M.D.,M.S., Chief Sam L. Pool M.D. (Eds.)-Principles of Clinical Medicine for Space Flight-SprinDokument592 SeitenAstronaut and Physician Michael R. Barratt M.D.,M.S. (Auth.), Astronaut and Physician Michael R. Barratt M.D.,M.S., Chief Sam L. Pool M.D. (Eds.)-Principles of Clinical Medicine for Space Flight-SprinRatanieri100% (1)
- Sandro Skansi - Introduction To Deep Learning. From Logical Calculus To Artificial Intelligence (2018, Springer)Dokument193 SeitenSandro Skansi - Introduction To Deep Learning. From Logical Calculus To Artificial Intelligence (2018, Springer)RatanieriNoch keine Bewertungen
- 06944eb5513ef244ec882693720db20aDokument409 Seiten06944eb5513ef244ec882693720db20aRatanieri0% (1)
- (Synthesis Lectures on Digital Circuits and Systems) Thomas F. Schubert, Jr., Ernest M. Kim-Fundamentals of Electronics, Book 3_ Active Filters and Amplifier Frequency Response-Morgan & Claypool (2016.pdfDokument293 Seiten(Synthesis Lectures on Digital Circuits and Systems) Thomas F. Schubert, Jr., Ernest M. Kim-Fundamentals of Electronics, Book 3_ Active Filters and Amplifier Frequency Response-Morgan & Claypool (2016.pdfRatanieri100% (2)
- Maxon Datasheet EncoderDokument1 SeiteMaxon Datasheet EncoderRatanieriNoch keine Bewertungen
- Datenblatt EC45fl MILE en OktDokument10 SeitenDatenblatt EC45fl MILE en OktRatanieriNoch keine Bewertungen
- TC94A70FG ToshibaDokument2 SeitenTC94A70FG ToshibaRatanieriNoch keine Bewertungen
- Integratedspaceplan2color PDFDokument1 SeiteIntegratedspaceplan2color PDFRatanieriNoch keine Bewertungen
- 81 PDFDokument1 Seite81 PDFRatanieriNoch keine Bewertungen
- 30 MM, Graphite Brushes, 60 Watt: Order NumberDokument1 Seite30 MM, Graphite Brushes, 60 Watt: Order NumberRatanieriNoch keine Bewertungen
- Hanser BooksDokument30 SeitenHanser Bookshabiba jamilNoch keine Bewertungen
- 05 - Sulzer - Separator InternalsDokument53 Seiten05 - Sulzer - Separator InternalsVicente RegulezNoch keine Bewertungen
- Color Changing Cylinder Universal Indicator and Dry IceDokument2 SeitenColor Changing Cylinder Universal Indicator and Dry Iceapi-354141486Noch keine Bewertungen
- ACI 304R Guide For Meas., Mix., Transp., & Placing ConcDokument41 SeitenACI 304R Guide For Meas., Mix., Transp., & Placing ConcVasanth KumarNoch keine Bewertungen
- A22009BDokument162 SeitenA22009BInstalatii CivileNoch keine Bewertungen
- LNG Technology SelectionDokument9 SeitenLNG Technology SelectionWayne MonneryNoch keine Bewertungen
- A10083395 Piping Service IndexDokument2 SeitenA10083395 Piping Service IndexPIERRONNoch keine Bewertungen
- Mini Project in Process Equipment Design & Economics Course at IITBDokument1 SeiteMini Project in Process Equipment Design & Economics Course at IITBAman ShahNoch keine Bewertungen
- ScrewsDokument21 SeitenScrewsRoh GadNoch keine Bewertungen
- Geotechnical Instrumentation and Monitoring For EarthworksDokument6 SeitenGeotechnical Instrumentation and Monitoring For EarthworksAnonymous E0FEYfaNoch keine Bewertungen
- Bible Saintgobain PamDokument742 SeitenBible Saintgobain PamfrankytgNoch keine Bewertungen
- DVET Amravati Govt ITIDokument32 SeitenDVET Amravati Govt ITIVaibhav KaleNoch keine Bewertungen
- Pentapharm Brochure (En) 3.17.14Dokument12 SeitenPentapharm Brochure (En) 3.17.14imakantisNoch keine Bewertungen
- Technical Paper SiC Ceramic MembranesDokument5 SeitenTechnical Paper SiC Ceramic MembranesEman El DsoukyNoch keine Bewertungen
- CBC COVID19 Product List 3 - 20 - 2020 PDFDokument10 SeitenCBC COVID19 Product List 3 - 20 - 2020 PDFCandra SuryaNoch keine Bewertungen
- Student Safety Sheets: EthanolDokument1 SeiteStudent Safety Sheets: EthanolNina FairuzNoch keine Bewertungen
- AcryGuard TDS 2020Dokument3 SeitenAcryGuard TDS 2020sarah magdyNoch keine Bewertungen
- Mepoxe ANewDokument4 SeitenMepoxe ANewHasbi Ashidiqi PNoch keine Bewertungen
- SGT 600Dokument47 SeitenSGT 600Nagam Abhishek100% (3)
- Lecture 02 01 Process DevelopmentDokument20 SeitenLecture 02 01 Process DevelopmentDon ReloNoch keine Bewertungen
- Rock Cycle Crayon LabDokument4 SeitenRock Cycle Crayon Labapi-251355123Noch keine Bewertungen
- TriNano Ultra Precision CMM (White Paper)Dokument6 SeitenTriNano Ultra Precision CMM (White Paper)TriNanoNoch keine Bewertungen
- Crouse Hinds Rs RSM Rss Junction Boxes Catalog PageDokument1 SeiteCrouse Hinds Rs RSM Rss Junction Boxes Catalog Pagejose luisNoch keine Bewertungen
- Capstone Report On Wheel Chair Cum StretcherDokument40 SeitenCapstone Report On Wheel Chair Cum StretcherRakesh Moparthi100% (1)
- 3500 Series: Machinery Protection SystemDokument12 Seiten3500 Series: Machinery Protection SystemShivakumarNoch keine Bewertungen
- High Performance LubricantsDokument20 SeitenHigh Performance Lubricantsmaicol21n100% (2)
- Plastiment VZ PDFDokument2 SeitenPlastiment VZ PDFDarwin SyahputraNoch keine Bewertungen