Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Schwing SP 500 EnglishDokument222 SeitenSchwing SP 500 EnglishManuel Andres Manrique Lopez92% (12)
- CFM56-3 Familiarization Training Manual MTU Maintenance Zhuhai Co. LTDDokument59 SeitenCFM56-3 Familiarization Training Manual MTU Maintenance Zhuhai Co. LTDrenjithaero100% (4)
- RST 2010 CatalogDokument90 SeitenRST 2010 CatalogGoodBikesNoch keine Bewertungen
- Steam and Oil Flushing Procedure of LDO & HFODokument10 SeitenSteam and Oil Flushing Procedure of LDO & HFOislamfarag2Noch keine Bewertungen
- Tablas Medidas Tubos de Acero API5L - ASTM A53 - A106Dokument6 SeitenTablas Medidas Tubos de Acero API5L - ASTM A53 - A106Reinaldo AndaraNoch keine Bewertungen
- Chapter 10 VLE - UpdatedDokument45 SeitenChapter 10 VLE - UpdatedFakhrulShahrilEzanieNoch keine Bewertungen
- Ch06 Hardware Components For Automation 14-210317Dokument38 SeitenCh06 Hardware Components For Automation 14-210317MONICA YUNITA ,100% (2)
- Statically Indeterminate BeamsDokument7 SeitenStatically Indeterminate BeamsMary Jane PelaezNoch keine Bewertungen
- Estimation TCI Sanmar - EDC Vent Condenser Tag No E-102Dokument5 SeitenEstimation TCI Sanmar - EDC Vent Condenser Tag No E-102Raviraj Shashikant PatilNoch keine Bewertungen
- Boiling and CondensationDokument13 SeitenBoiling and CondensationPrithvi de VilliersNoch keine Bewertungen
- PrimeRoyal HPD LE IOMDokument82 SeitenPrimeRoyal HPD LE IOMTadeo FajardoNoch keine Bewertungen
- (BOOK NO. 13) - (18) - SG-D-08 - Primary Heat Transport System - (OTHER)Dokument83 Seiten(BOOK NO. 13) - (18) - SG-D-08 - Primary Heat Transport System - (OTHER)pratip_bNoch keine Bewertungen
- SR5080 Booklet Finisher RTBsDokument22 SeitenSR5080 Booklet Finisher RTBsTecnica CPY Copiadoras del ParaguayNoch keine Bewertungen
- D77003 enDokument57 SeitenD77003 enzliangNoch keine Bewertungen
- Well Rounded.: 360 CassetteDokument12 SeitenWell Rounded.: 360 Cassettetafadzwa simbiNoch keine Bewertungen
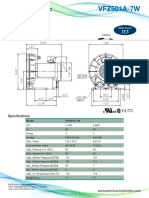
- Fuji Electric VFZ501A 7W DatasheetDokument2 SeitenFuji Electric VFZ501A 7W Datasheetghmp123Noch keine Bewertungen
- 下载Dokument4 Seiten下载Mars JackNoch keine Bewertungen
- Sandvik DD321Dokument4 SeitenSandvik DD321Anonymous Dm7iMmt0% (2)
- Access - Catalog.805b.Color - DP&Casing Tools-51Dokument1 SeiteAccess - Catalog.805b.Color - DP&Casing Tools-51RICHARDNoch keine Bewertungen
- Slab Analysis of Ring Rolling AssumingConstantShearFrictionDokument7 SeitenSlab Analysis of Ring Rolling AssumingConstantShearFrictionMatteo Dalla Vecchia100% (1)
- Quiz 2 2013 ThermodynamicDokument2 SeitenQuiz 2 2013 ThermodynamicPaartiban PaneerselvamNoch keine Bewertungen
- Kohn-Sham Equations For DFTDokument15 SeitenKohn-Sham Equations For DFTRikardo Pino RiosNoch keine Bewertungen
- Electrification in MotorsportDokument8 SeitenElectrification in Motorsportddi11Noch keine Bewertungen
- TANCO 1400EH-2014-EnglishDokument116 SeitenTANCO 1400EH-2014-EnglishErwin GerdingNoch keine Bewertungen
- ) - (75 Meters) (M) - (9.8: 64 Solutions and Tests For Exploring Creation With PhysicsDokument1 Seite) - (75 Meters) (M) - (9.8: 64 Solutions and Tests For Exploring Creation With Physicsgjw1684Noch keine Bewertungen
- Swimming EquipmentsDokument45 SeitenSwimming EquipmentsHaymanAHMEDNoch keine Bewertungen
- JoysticksDokument12 SeitenJoysticksJuan Carlos Aragon CompiNoch keine Bewertungen
- AFRC - Improving Performance of Coker HeatersDokument29 SeitenAFRC - Improving Performance of Coker Heatersashutosh_garg_10Noch keine Bewertungen
- NES 339 Requirements For Steering and Stabilizer Systems For HM Surface Ships and Royal Fleet Auxiliaries - Category 1Dokument66 SeitenNES 339 Requirements For Steering and Stabilizer Systems For HM Surface Ships and Royal Fleet Auxiliaries - Category 1JEORJENoch keine Bewertungen
- ME302: Materials Mechanics: Chap. 1 StressDokument16 SeitenME302: Materials Mechanics: Chap. 1 StressMat MatttNoch keine Bewertungen