Das könnte Ihnen auch gefallen
- PID-APPLIED CONTROL SYSTEMS: PROPORTIONAL PLUS INTEGRAL PLUS DERIVATIVE CONTROLDokument28 SeitenPID-APPLIED CONTROL SYSTEMS: PROPORTIONAL PLUS INTEGRAL PLUS DERIVATIVE CONTROLhiltoneng100% (1)
- Priyanka RajputDokument5 SeitenPriyanka RajputajieNoch keine Bewertungen
- Application of Improved PID Controller in Motor Drive SystemDokument19 SeitenApplication of Improved PID Controller in Motor Drive SystemmahderNoch keine Bewertungen
- Week 12 - Control SystemDokument30 SeitenWeek 12 - Control SystemAzizan Anuar100% (1)
- Week14pidmay242016pe3032 160530081519Dokument57 SeitenWeek14pidmay242016pe3032 160530081519AztvNoch keine Bewertungen
- Automated Control Resumen Unidd IVDokument23 SeitenAutomated Control Resumen Unidd IVRakgnar LodbrokNoch keine Bewertungen
- PID ControllerDokument13 SeitenPID ControllerVijay YadavNoch keine Bewertungen
- Feedback Control SystemDokument40 SeitenFeedback Control SystemMuhammad SaeedNoch keine Bewertungen
- Lab 7 Pid ControlDokument6 SeitenLab 7 Pid ControlFatin FarehahNoch keine Bewertungen
- InTech-Pid Control TheoryDokument17 SeitenInTech-Pid Control TheoryAbner BezerraNoch keine Bewertungen
- PID TIA Portal 5Dokument110 SeitenPID TIA Portal 5Yogi KipiantoNoch keine Bewertungen
- Chapter 19 Programming The PID AlgorithmDokument103 SeitenChapter 19 Programming The PID AlgorithmMr KevinNoch keine Bewertungen
- Modelling, Feedback Control Design and Simulation of An Industrial ApplicationDokument21 SeitenModelling, Feedback Control Design and Simulation of An Industrial ApplicationjttatsumiNoch keine Bewertungen
- Chap19 SDokument108 SeitenChap19 SRaghad AlnajimNoch keine Bewertungen
- JSME - Volume 12 - Issue 4 - Pages 53-66Dokument14 SeitenJSME - Volume 12 - Issue 4 - Pages 53-66Nguyễn Trung ThôngNoch keine Bewertungen
- Chap19 SDokument111 SeitenChap19 SIsraelNoch keine Bewertungen
- PID Pole-Placement Controller Design and Tuning MethodsDokument16 SeitenPID Pole-Placement Controller Design and Tuning MethodsFiras BackourNoch keine Bewertungen
- Classical PidcontrollerDokument83 SeitenClassical PidcontrollerEric KamauNoch keine Bewertungen
- Optimal Robust PID Control Using Taguchi MethodDokument6 SeitenOptimal Robust PID Control Using Taguchi MethodIsra Lemus SanchezNoch keine Bewertungen
- Task2 1 Specific Training-EnDokument35 SeitenTask2 1 Specific Training-EnSantiago LarrazNoch keine Bewertungen
- Synthesis of Automatic Feedback Control Loops: A More Quantitative ViewDokument10 SeitenSynthesis of Automatic Feedback Control Loops: A More Quantitative ViewJavier OrnaNoch keine Bewertungen
- Control of Continuous Process: Lecturer: Dr. Shallon StubbsDokument32 SeitenControl of Continuous Process: Lecturer: Dr. Shallon StubbsLuther King Ferguson100% (1)
- Controller PrincipleDokument24 SeitenController PrinciplePortia ShilengeNoch keine Bewertungen
- Time Response and Classical Controllers: 17 February 2016 Automation and Computer Control System 1Dokument41 SeitenTime Response and Classical Controllers: 17 February 2016 Automation and Computer Control System 1Awe HughNoch keine Bewertungen
- Effects of A PID Controller in Closed Loop Feedback SystemDokument4 SeitenEffects of A PID Controller in Closed Loop Feedback Systemali.azim1380Noch keine Bewertungen
- The Application of Nonlinear PID Controller in Generator Excitation SystemDokument6 SeitenThe Application of Nonlinear PID Controller in Generator Excitation SystemNor Rochmad Hadi PNoch keine Bewertungen
- KrishiDokument3 SeitenKrishiKrishi ChhedaNoch keine Bewertungen
- Real Time Speed Control of DC Motor With Unknown Transfer Function Through PIDDokument6 SeitenReal Time Speed Control of DC Motor With Unknown Transfer Function Through PIDArbab HaiderNoch keine Bewertungen
- Avr PDFDokument5 SeitenAvr PDFbrmamorNoch keine Bewertungen
- PID Control TheoryDokument17 SeitenPID Control TheoryManuel Santos MNoch keine Bewertungen
- PEEE801D Question Bank CA4Dokument3 SeitenPEEE801D Question Bank CA4Bhudev SarkarNoch keine Bewertungen
- PDC Chapter 8Dokument49 SeitenPDC Chapter 8satya sagarNoch keine Bewertungen
- Servo FundamentalsDokument11 SeitenServo Fundamentalsapi-3797895Noch keine Bewertungen
- Session1 SC16B047Dokument7 SeitenSession1 SC16B047riyazuddin shaikNoch keine Bewertungen
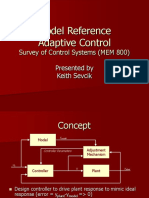
- Model Reference Adaptive Control: Survey of Control Systems (MEM 800)Dokument26 SeitenModel Reference Adaptive Control: Survey of Control Systems (MEM 800)Gilmar LeiteNoch keine Bewertungen
- Chap19 SDokument99 SeitenChap19 STest GgNoch keine Bewertungen
- Proportional Integral AND Derivative ControllerDokument16 SeitenProportional Integral AND Derivative ControllerAzhar AliNoch keine Bewertungen
- Survey of Control Systems (MEM 800) PresentedDokument26 SeitenSurvey of Control Systems (MEM 800) PresentedvananhbarcaNoch keine Bewertungen
- Controllers and Thier Tuningclo2Dokument31 SeitenControllers and Thier Tuningclo2AreeshaNoch keine Bewertungen
- Load Frequency Control For Interconnected Power System Using Different ControllersDokument5 SeitenLoad Frequency Control For Interconnected Power System Using Different ControllersmahendraNoch keine Bewertungen
- Tci Practica 8Dokument17 SeitenTci Practica 8Iván Méndez FloresNoch keine Bewertungen
- Controller Design For Rotary Inverted Pendulum SysDokument17 SeitenController Design For Rotary Inverted Pendulum SysThien MaiNoch keine Bewertungen
- Discrete PID Controller On tinyAVR and megaAVR DevicesDokument10 SeitenDiscrete PID Controller On tinyAVR and megaAVR DeviceskeisinhoNoch keine Bewertungen
- Control Tutorials For MATLAB and Simulink - Introduction - PID Controller DesignDokument17 SeitenControl Tutorials For MATLAB and Simulink - Introduction - PID Controller DesignPrashant ChinamalliNoch keine Bewertungen
- Priprema Za Ispit 2Dokument8 SeitenPriprema Za Ispit 2Aleksandar MicicNoch keine Bewertungen
- Ujca1 15000591Dokument7 SeitenUjca1 15000591Yang YingNoch keine Bewertungen
- Adaptive Control: Presented by Harikrishna Satish.TDokument22 SeitenAdaptive Control: Presented by Harikrishna Satish.THari ThotaNoch keine Bewertungen
- N Adaptive PID Controller Based On Genetic Algorithm ProcessorDokument6 SeitenN Adaptive PID Controller Based On Genetic Algorithm ProcessorEngr Nayyer Nayyab MalikNoch keine Bewertungen
- Feedback Controllers: Figure. Schematic Diagram For A Stirred-Tank Blending SystemDokument24 SeitenFeedback Controllers: Figure. Schematic Diagram For A Stirred-Tank Blending SystemRama ChilpuriNoch keine Bewertungen
- 2.1 Closed Loop SISO ControlDokument5 Seiten2.1 Closed Loop SISO ControlJoy Krishna MondalNoch keine Bewertungen
- 1577066Dokument20 Seiten1577066hazem saadNoch keine Bewertungen
- PID Controller DesignDokument14 SeitenPID Controller DesignWashington Luiz Leite SousaNoch keine Bewertungen
- FUZZY BASED CONTROLLER FOR HEAVY DUTY GAS TURBINEDokument5 SeitenFUZZY BASED CONTROLLER FOR HEAVY DUTY GAS TURBINERichard CleeNoch keine Bewertungen
- Control of DC Motor Using Different Control StrategiesVon EverandControl of DC Motor Using Different Control StrategiesNoch keine Bewertungen
- Advanced Techniques and Technology of Computer-Aided Feedback ControlVon EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlNoch keine Bewertungen
- Analog Automation and Digital Feedback Control TechniquesVon EverandAnalog Automation and Digital Feedback Control TechniquesNoch keine Bewertungen
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsVon EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNoch keine Bewertungen
- Two Boys' Devotion"The title "TITLE"Two Boys' DevotionDokument3 SeitenTwo Boys' Devotion"The title "TITLE"Two Boys' DevotionRajeevSangamNoch keine Bewertungen
- Top Indian Education Websites & OrganizationsDokument1 SeiteTop Indian Education Websites & OrganizationsRajeevSangamNoch keine Bewertungen
- AnswerDokument4 SeitenAnswerRajeevSangamNoch keine Bewertungen
- Winds, Storms and CyclonesDokument12 SeitenWinds, Storms and CyclonesRajeevSangamNoch keine Bewertungen
- Unit I Water TechnologyDokument23 SeitenUnit I Water TechnologyRajeevSangamNoch keine Bewertungen
- Business and Secondary IncomeDokument1 SeiteBusiness and Secondary IncomeRajeevSangamNoch keine Bewertungen
- New Microsoft Word DocumentDokument2 SeitenNew Microsoft Word DocumentRajeevSangamNoch keine Bewertungen
- 1 Social Science Tracing Changes Through A Thousand YearsDokument9 Seiten1 Social Science Tracing Changes Through A Thousand YearsRajeevSangam100% (1)
- Chapter-4: Unit of HeatDokument16 SeitenChapter-4: Unit of HeatRajeevSangamNoch keine Bewertungen
- Respiration in OrganismsDokument9 SeitenRespiration in OrganismsRajeevSangamNoch keine Bewertungen
- Fibre To FabricDokument13 SeitenFibre To FabricRajeevSangamNoch keine Bewertungen
- Plant Nutrition Chapter-1: Review QuestionsDokument17 SeitenPlant Nutrition Chapter-1: Review QuestionsRajeevSangam100% (1)
- Electric Current and Its EffectsDokument11 SeitenElectric Current and Its EffectsRajeevSangam100% (1)
- Tribes, Nomads and Settlements in Ancient IndiaDokument7 SeitenTribes, Nomads and Settlements in Ancient IndiaRajeevSangamNoch keine Bewertungen
- Motion and TimeDokument13 SeitenMotion and TimeRajeevSangam100% (1)
- Rental Agreement Sample and All You Need To Know Google DocsDokument2 SeitenRental Agreement Sample and All You Need To Know Google DocsRajeevSangamNoch keine Bewertungen
- Soil Types, Formation and ImportanceDokument9 SeitenSoil Types, Formation and ImportanceRajeevSangamNoch keine Bewertungen
- Reproduction in PlantsDokument7 SeitenReproduction in PlantsRajeevSangam0% (1)
- New Microsoft Word DocumentDokument13 SeitenNew Microsoft Word DocumentRajeevSangamNoch keine Bewertungen
- Masculine Nouns Are CalledDokument2 SeitenMasculine Nouns Are CalledRajeevSangamNoch keine Bewertungen
- New Microsoft Word DocumentDokument6 SeitenNew Microsoft Word DocumentRajeevSangamNoch keine Bewertungen
- 6 8 Green Warrior Free Worksheets 2018Dokument9 Seiten6 8 Green Warrior Free Worksheets 2018RajeevSangamNoch keine Bewertungen
- Rental Agreement Sample and All You Need To Know Google DocsDokument2 SeitenRental Agreement Sample and All You Need To Know Google DocsRajeevSangamNoch keine Bewertungen
- CBSE Class 6 History Practice Worksheets - 7Dokument2 SeitenCBSE Class 6 History Practice Worksheets - 7RajeevSangamNoch keine Bewertungen
- Business and Secondary IncomeDokument1 SeiteBusiness and Secondary IncomeRajeevSangamNoch keine Bewertungen
- Surface TestingDokument1 SeiteSurface TestingRajeevSangamNoch keine Bewertungen
- Rental Agreement Sample and All You Need To Know Google DocsDokument5 SeitenRental Agreement Sample and All You Need To Know Google DocsArvind KumarNoch keine Bewertungen
- Îûü - Êæà Gæé Aæé Gíÿá Ü®Üá° Êüááí©®Ü G®Ýíwüpær Úóüáêüâ Æãí Üá Æãvüx Gêý Ý Ä. Ü Üë Ü Üpüwüùüá Îûü - Ü Jí Üá Ýwüêæí Üá Aäáãà - ÆíwüùüããüáDokument1 SeiteÎûü - Êæà Gæé Aæé Gíÿá Ü®Üá° Êüááí©®Ü G®Ýíwüpær Úóüáêüâ Æãí Üá Æãvüx Gêý Ý Ä. Ü Üë Ü Üpüwüùüá Îûü - Ü Jí Üá Ýwüêæí Üá Aäáãà - ÆíwüùüããüáRajeevSangamNoch keine Bewertungen
- Format Rent AgreementDokument2 SeitenFormat Rent AgreementRajeevSangamNoch keine Bewertungen
- History6 - 1 - What, Where, How and WhenDokument10 SeitenHistory6 - 1 - What, Where, How and WhenShyam GuptaNoch keine Bewertungen
- LNG Bunker QraDokument58 SeitenLNG Bunker QraEngineer165298Noch keine Bewertungen
- Technical Seminar Agenda and Generator System OverviewDokument86 SeitenTechnical Seminar Agenda and Generator System OverviewKenneth100% (1)
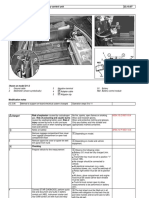
- Checking battery control unitDokument3 SeitenChecking battery control unitjuanNoch keine Bewertungen
- Radiology Final QuestionsDokument52 SeitenRadiology Final QuestionsRashed Shatnawi50% (4)
- Service Agreement - Zeroid PDFDokument2 SeitenService Agreement - Zeroid PDFYushau Muhammad LawalNoch keine Bewertungen
- Academic StyleDokument4 SeitenAcademic StyleHa ToNoch keine Bewertungen
- ZetaPlus EXT SP Series CDokument5 SeitenZetaPlus EXT SP Series Cgeorgadam1983Noch keine Bewertungen
- Mitsubishi Evo Vii Workshop ManualDokument1.471 SeitenMitsubishi Evo Vii Workshop ManuallimaynardNoch keine Bewertungen
- Ford Taurus Service Manual - Disassembly and Assembly - Automatic Transaxle-Transmission - 6F35 - Automatic Transmission - PowertrainDokument62 SeitenFord Taurus Service Manual - Disassembly and Assembly - Automatic Transaxle-Transmission - 6F35 - Automatic Transmission - Powertraininfocarsservice.deNoch keine Bewertungen
- 2015 StoneAge - LowresDokument51 Seiten2015 StoneAge - LowresAZLAN ABDULLAINoch keine Bewertungen
- PHY3 BJune 2004Dokument1 SeitePHY3 BJune 2004api-3726022Noch keine Bewertungen
- Technical Data Sheet 01DT-1L..: Type OverviewDokument4 SeitenTechnical Data Sheet 01DT-1L..: Type OverviewJNoch keine Bewertungen
- Principles of The Doctrine of ChristDokument17 SeitenPrinciples of The Doctrine of ChristNovus Blackstar100% (2)
- Trends1 Aio TT2-L2Dokument4 SeitenTrends1 Aio TT2-L2Bart Simpsons FernándezNoch keine Bewertungen
- The Message Development Tool - A Case For Effective Operationalization of Messaging in Social Marketing PracticeDokument17 SeitenThe Message Development Tool - A Case For Effective Operationalization of Messaging in Social Marketing PracticesanjayamalakasenevirathneNoch keine Bewertungen
- Autoridad Myles Munroe Poder de La El Proposito y PDF Autoridad Myles MunroeDokument5 SeitenAutoridad Myles Munroe Poder de La El Proposito y PDF Autoridad Myles MunroeMaricarmen MorenoNoch keine Bewertungen
- WHIRLPOOL AWE 2214 User ManualDokument19 SeitenWHIRLPOOL AWE 2214 User ManualSilvestru NemorovNoch keine Bewertungen
- Should A Christian Believer Wear An ANKH?: Luxury Art By: Ketu'Rah GloreDokument4 SeitenShould A Christian Believer Wear An ANKH?: Luxury Art By: Ketu'Rah GloreMyk Twentytwenty NBeyondNoch keine Bewertungen
- EM2P70CLP (LBP) - DatasheetDokument4 SeitenEM2P70CLP (LBP) - DatasheetMarquesNoch keine Bewertungen
- Lesson 5 The 19th Century PhilippinesDokument5 SeitenLesson 5 The 19th Century PhilippinesJoquem PamesaNoch keine Bewertungen
- Differential Scanning CalorimetryDokument60 SeitenDifferential Scanning CalorimetryMariyam100% (2)
- Modern Pharmacy Layout TrendsDokument9 SeitenModern Pharmacy Layout TrendsRaheem KhanNoch keine Bewertungen
- Galway Music Officer RoleDokument20 SeitenGalway Music Officer RoleJohanna KennyNoch keine Bewertungen
- The DHCP Snooping and DHCP Alert Method in SecurinDokument9 SeitenThe DHCP Snooping and DHCP Alert Method in SecurinSouihi IslemNoch keine Bewertungen
- Consumer Behavior, Market Segmentation and Marketing PlanDokument57 SeitenConsumer Behavior, Market Segmentation and Marketing PlanShubhamNoch keine Bewertungen
- Wag Acquisition v. Vubeology Et. Al.Dokument29 SeitenWag Acquisition v. Vubeology Et. Al.Patent LitigationNoch keine Bewertungen
- ICT Backup Procedure PolicyDokument8 SeitenICT Backup Procedure PolicySultan BatoorNoch keine Bewertungen
- Indian Standard: Hexagon Head Bolts, Screws and Nuts of Product Grades A and BDokument11 SeitenIndian Standard: Hexagon Head Bolts, Screws and Nuts of Product Grades A and BJignesh TrivediNoch keine Bewertungen
- General Organic and Biological Chemistry 6th Edition Stoker Test BankDokument12 SeitenGeneral Organic and Biological Chemistry 6th Edition Stoker Test BankJenniferCookabdqk100% (14)
- Record of Appropriations and Obligations: TotalDokument1 SeiteRecord of Appropriations and Obligations: TotaljomarNoch keine Bewertungen