Das könnte Ihnen auch gefallen
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysVon EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNoch keine Bewertungen
- Train EpicycloidalDokument12 SeitenTrain EpicycloidalNaima LaaroussiNoch keine Bewertungen
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceVon EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceNoch keine Bewertungen
- Cahier de Charge (Vélo Hydrolique)Dokument17 SeitenCahier de Charge (Vélo Hydrolique)David paroleNoch keine Bewertungen
- Chapitre 1Dokument31 SeitenChapitre 1mahdi hadhri100% (1)
- Fin de CycleDokument50 SeitenFin de CycleChaouki Fradi100% (1)
- 189 4 PDFDokument3 Seiten189 4 PDFZiari SaberNoch keine Bewertungen
- Modelisation AssemblageDokument33 SeitenModelisation AssemblageWalid NASRI100% (1)
- Train EpicycloidalDokument13 SeitenTrain EpicycloidalKhmira WafaNoch keine Bewertungen
- Projet Cfm31 Final1 2Dokument81 SeitenProjet Cfm31 Final1 2Monia Bardaoui Ep HadhiriNoch keine Bewertungen
- Catia Presentation Interface Et EsquisseDokument13 SeitenCatia Presentation Interface Et EsquisseSaid EL FakkoussiNoch keine Bewertungen
- I-Mise en Situation:: (Voir Livre de TP Page 19) ConclusionDokument3 SeitenI-Mise en Situation:: (Voir Livre de TP Page 19) Conclusionhammamin2008Noch keine Bewertungen
- Examen de Conception Mécanique 2 Ième Année INSA Ingénierie de La Construction. Pont À Travée Mobile PDFDokument9 SeitenExamen de Conception Mécanique 2 Ième Année INSA Ingénierie de La Construction. Pont À Travée Mobile PDFmabroukNoch keine Bewertungen
- Cours Pneumatique PDFDokument11 SeitenCours Pneumatique PDFdayangNoch keine Bewertungen
- Système Vis-Écrou: Projet Professionnel de L'etudiantDokument32 SeitenSystème Vis-Écrou: Projet Professionnel de L'etudiantellouze islemNoch keine Bewertungen
- Dimensionnement D Un Moteur PDFDokument5 SeitenDimensionnement D Un Moteur PDFMohamedAmineDabachiNoch keine Bewertungen
- Ajustements CoursDokument4 SeitenAjustements CoursGuy OmangNoch keine Bewertungen
- TP Calcul Pousse SeringueDokument6 SeitenTP Calcul Pousse Seringueapi34Noch keine Bewertungen
- Étude Et Conception D'un Moteur À Combustion Interne À Quatre TempsDokument101 SeitenÉtude Et Conception D'un Moteur À Combustion Interne À Quatre TempsWendkouni Josoé OUEDRAOGONoch keine Bewertungen
- Sujet:: Train D'atterrissageDokument46 SeitenSujet:: Train D'atterrissageygNoch keine Bewertungen
- SADT Cours Etude Des Systemes 062016Dokument17 SeitenSADT Cours Etude Des Systemes 062016Ben FahNoch keine Bewertungen
- Cglycees 2007 SujetDokument30 SeitenCglycees 2007 Sujettony863Noch keine Bewertungen
- Convoyeur ScotcheurDokument8 SeitenConvoyeur ScotcheurHamrouniNoch keine Bewertungen
- Bouatia TaqiyeddineDokument35 SeitenBouatia Taqiyeddinemechtoub sofianeNoch keine Bewertungen
- Examen TribologieDokument10 SeitenExamen TribologieHatem HamekNoch keine Bewertungen
- COURS SADT eDokument2 SeitenCOURS SADT eMustafa MoussaouiNoch keine Bewertungen
- Rapport AbaqusDokument27 SeitenRapport Abaquselgheryb_choukri100% (1)
- Rapport de TP de MecaniqueDokument8 SeitenRapport de TP de MecaniqueHenry JOSIASNoch keine Bewertungen
- 28-Guidage en RotationDokument29 Seiten28-Guidage en Rotationyassine22100% (2)
- Écrouissage - WikiwandDokument16 SeitenÉcrouissage - Wikiwandelie chaneNoch keine Bewertungen
- Analyse Fonctionnelle Interne D%u2019un ProduitDokument5 SeitenAnalyse Fonctionnelle Interne D%u2019un ProduitGuiliassNoch keine Bewertungen
- Avantages Et Inconvenients Des RoulementsDokument7 SeitenAvantages Et Inconvenients Des Roulementsprojet5millionNoch keine Bewertungen
- Cours RoulementsDokument5 SeitenCours RoulementssemahNoch keine Bewertungen
- Fiche de TD Comportement Dynamique 2022Dokument15 SeitenFiche de TD Comportement Dynamique 2022MVOULA ZoéNoch keine Bewertungen
- Poly Dyn VibDokument62 SeitenPoly Dyn VibBelaliaNoch keine Bewertungen
- Rapport MINI PROJETDokument36 SeitenRapport MINI PROJETوليد الصحراويNoch keine Bewertungen
- 2 Encastrement Cours PDFDokument7 Seiten2 Encastrement Cours PDFLarbi ElbakkaliNoch keine Bewertungen
- TD: Optimisation Topologique Guidée D'un Cadre de Vélo: Fabbrication AdditiveDokument8 SeitenTD: Optimisation Topologique Guidée D'un Cadre de Vélo: Fabbrication AdditiveLaila Azzouzi100% (1)
- MDDokument10 SeitenMDlamiabejaouiNoch keine Bewertungen
- Poulies Et Courroies de Transmission. Données Numériques. (O)Dokument23 SeitenPoulies Et Courroies de Transmission. Données Numériques. (O)DieseNoch keine Bewertungen
- PFF Chafik Bilal Elyargui 2020-2021 - Groupe 1 PDFDokument98 SeitenPFF Chafik Bilal Elyargui 2020-2021 - Groupe 1 PDFMouad BotteNoch keine Bewertungen
- ch2 Materiaux Et EnergieDokument63 Seitench2 Materiaux Et EnergieRiheb MoncerNoch keine Bewertungen
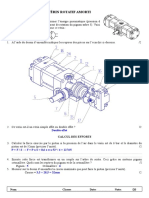
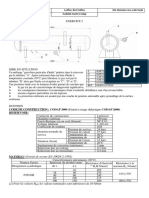
- TD - Vérin Rotatif AmortiDokument5 SeitenTD - Vérin Rotatif AmortiLAILA BNNoch keine Bewertungen
- Conception MecaniqueDokument86 SeitenConception Mecaniquetarek100% (1)
- Eleve La Manutention Des VehiculesDokument6 SeitenEleve La Manutention Des VehiculesATMANE ZIDOUHNoch keine Bewertungen
- RapportDokument76 SeitenRapportnoubi loicNoch keine Bewertungen
- EMBRAYAGEDokument3 SeitenEMBRAYAGEMarouane SekkakNoch keine Bewertungen
- ProjetDokument14 SeitenProjetYasmine HammamiNoch keine Bewertungen
- Rendu N°1-Pelle HydrauliqueDokument4 SeitenRendu N°1-Pelle Hydrauliqueettaqi_hassan11870% (1)
- Accouplement GénéralitésDokument4 SeitenAccouplement GénéralitésmatozoNoch keine Bewertungen
- Harrouche Fateh PDFDokument148 SeitenHarrouche Fateh PDFderghalNoch keine Bewertungen
- Tour CNCDokument1 SeiteTour CNCislamovicNoch keine Bewertungen
- Chapitre II Le GrafcetDokument16 SeitenChapitre II Le Grafcetsociété ettrisiti oulad fares100% (1)
- Rapport Complet PFEDokument42 SeitenRapport Complet PFEthekrumpNoch keine Bewertungen
- Roulements PréchargésDokument27 SeitenRoulements PréchargésYounessElkarkouriNoch keine Bewertungen
- Manuel de Prise en MainDokument68 SeitenManuel de Prise en Mainsalahgim80% (5)
- Cours Exploitation Des Systémes Industriels Productique MécaniqueDokument75 SeitenCours Exploitation Des Systémes Industriels Productique MécaniqueimeneNoch keine Bewertungen
- 02 Transmission de Puissance Par EngrenagesDokument4 Seiten02 Transmission de Puissance Par EngrenagesDayzenWayNoch keine Bewertungen
- Analyse FonctionnelleDokument7 SeitenAnalyse FonctionnelleJoeNoch keine Bewertungen
- Analyse Fon Ction NelleDokument11 SeitenAnalyse Fon Ction NelleTOPASONoch keine Bewertungen
- Fonction Mécanique LiaisonDokument11 SeitenFonction Mécanique LiaisonmoihaNoch keine Bewertungen
- M1303 Eco-Conception (Prof)Dokument150 SeitenM1303 Eco-Conception (Prof)moihaNoch keine Bewertungen
- Jalon Final PréliminaireDokument35 SeitenJalon Final PréliminairemoihaNoch keine Bewertungen
- Chap2 Liaisons Solides VAS2 Potel GatignolDokument11 SeitenChap2 Liaisons Solides VAS2 Potel GatignolmoihaNoch keine Bewertungen
- Automatismes IndustrielsDokument2 SeitenAutomatismes IndustrielsbaptichosendyNoch keine Bewertungen
- Chapitre 3 Categories Courantes Huiles Industrielles PDFDokument9 SeitenChapitre 3 Categories Courantes Huiles Industrielles PDFKamel Bousnina100% (1)
- VEGETALISATION Verticale Des Milieux Urbains CoursDokument193 SeitenVEGETALISATION Verticale Des Milieux Urbains Coursecogirl100% (1)
- Formation RobotDokument115 SeitenFormation RobotĦăm Ză100% (2)
- Chap 6B Barrage en RemblaisDokument103 SeitenChap 6B Barrage en RemblaisandregermainmbogbaNoch keine Bewertungen
- Caixa AutomaticaDokument29 SeitenCaixa AutomaticaJoão DantasNoch keine Bewertungen
- 1 Analyse FonctionnelleDokument21 Seiten1 Analyse FonctionnelleMohamed SomaiNoch keine Bewertungen
- Equipements Statiques PDFDokument179 SeitenEquipements Statiques PDFENG100% (1)
- Rapport Final SeaplastDokument238 SeitenRapport Final SeaplastAnonymous oyUAtpKNoch keine Bewertungen
- Rapport de Stage 40 Logement À Commune D'elamria Wilaya D'ain TemouchentDokument10 SeitenRapport de Stage 40 Logement À Commune D'elamria Wilaya D'ain Temouchentamical1955Noch keine Bewertungen
- Man.3.1.01 GB5-FB80 en V2.0Dokument66 SeitenMan.3.1.01 GB5-FB80 en V2.0Alfredo VianaNoch keine Bewertungen
- Presentation Des Moteurs de La Famille DV Et InjectionsDokument72 SeitenPresentation Des Moteurs de La Famille DV Et Injectionsgazole100% (2)
- Ferraillage de Murs de SoutenementDokument26 SeitenFerraillage de Murs de Soutenementaliabdalghafour100% (1)
- Excel de Calcul de Dalle Pleine BaelDokument11 SeitenExcel de Calcul de Dalle Pleine BaelboudoualNoch keine Bewertungen
- Installation Livebox2Dokument16 SeitenInstallation Livebox2olam batorNoch keine Bewertungen
- Dilatation 20et 20retraitDokument7 SeitenDilatation 20et 20retraitKamel FedaouiNoch keine Bewertungen
- g14270 Extraits Chapitres Grand Livre Du BricolageDokument68 Seiteng14270 Extraits Chapitres Grand Livre Du BricolageBeauté FormeNoch keine Bewertungen
- ADS ManuelDokument28 SeitenADS Manuelazizhamdi100% (2)
- CoursDokument751 SeitenCourshisohiso0% (1)
- Boite Vitesse CVT PDFDokument32 SeitenBoite Vitesse CVT PDFJawher SalemNoch keine Bewertungen
- TP MétallurgieDokument20 SeitenTP MétallurgieSoraya BouslahNoch keine Bewertungen
- TD Béton Armé 1 L3 2020 2021 1Dokument40 SeitenTD Béton Armé 1 L3 2020 2021 1Meziane Ykhlef100% (1)
- Catalogue PR Me5700dthdthc 396Dokument405 SeitenCatalogue PR Me5700dthdthc 396JuprayNoch keine Bewertungen
- 060 311 718 E SparePartsManual DKS3 MDP DOC PDFDokument78 Seiten060 311 718 E SparePartsManual DKS3 MDP DOC PDFAlexander Taco ArroyoNoch keine Bewertungen
- ZZ4554 - Altivar 312 SolarDokument2 SeitenZZ4554 - Altivar 312 SolarSINES France100% (1)
- IGV Pour Type DLN Sans IBHDokument9 SeitenIGV Pour Type DLN Sans IBHnabil160874Noch keine Bewertungen
- Selectionner Un Materiau 1Dokument9 SeitenSelectionner Un Materiau 1Kamel TayahiNoch keine Bewertungen
- CR1 Moteur Cycle 4t PDokument97 SeitenCR1 Moteur Cycle 4t PdonsallusNoch keine Bewertungen
- Mini Projet Les RoutesDokument15 SeitenMini Projet Les RouteslosirikaNoch keine Bewertungen
- Exercices Corrigé Codap24 Mars 6Dokument1 SeiteExercices Corrigé Codap24 Mars 6Simo SeprobNoch keine Bewertungen