Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Inclusions in Gross IncomeDokument2 SeitenInclusions in Gross Incomeloonie tunesNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Electric Vehicle Charging Station BplanDokument19 SeitenElectric Vehicle Charging Station BplanAjithNoch keine Bewertungen
- Preprints201808 0216 v1Dokument15 SeitenPreprints201808 0216 v1Baptista Jaime MilioneNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Tutorial 4 QuestionsDokument3 SeitenTutorial 4 QuestionshrfjbjrfrfNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Tesla - Electric Railway SystemDokument3 SeitenTesla - Electric Railway SystemMihai CroitoruNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- TMIS07 - Kalam Internship - S7 Tesla MindsDokument3 SeitenTMIS07 - Kalam Internship - S7 Tesla MindsDMJ JonesNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Plant Gardening AerationDokument4 SeitenPlant Gardening Aerationut.testbox7243Noch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Aggregate Production PlanningDokument5 SeitenAggregate Production PlanningSarbani SahuNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Ref Drawing 2. Ref Code: 3. Design DatasDokument3 SeitenRef Drawing 2. Ref Code: 3. Design DatasJoe Nadakkalan100% (3)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Faithful Love: Guitar SoloDokument3 SeitenFaithful Love: Guitar SoloCarol Goldburg33% (3)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- WP05 - ACT 01 - Development 1909Dokument53 SeitenWP05 - ACT 01 - Development 1909ramesh9966Noch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Understand Fox Behaviour - Discover WildlifeDokument1 SeiteUnderstand Fox Behaviour - Discover WildlifeChris V.Noch keine Bewertungen
- EverServ 7700 M77XX Quick Reference GuideDokument2 SeitenEverServ 7700 M77XX Quick Reference GuidetangocharliepdxNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Course Specifications: Fire Investigation and Failure Analysis (E901313)Dokument2 SeitenCourse Specifications: Fire Investigation and Failure Analysis (E901313)danateoNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- CPARDokument2 SeitenCPARHarryrich MarbellaNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Software Requirements SpecificationDokument9 SeitenSoftware Requirements SpecificationSu-kEm Tech LabNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- SrsDokument7 SeitenSrsRahul Malhotra50% (2)
- OpenGL in JitterDokument19 SeitenOpenGL in JitterjcpsimmonsNoch keine Bewertungen
- Muscular System Coloring Book: Now You Can Learn and Master The Muscular System With Ease While Having Fun - Pamphlet BooksDokument8 SeitenMuscular System Coloring Book: Now You Can Learn and Master The Muscular System With Ease While Having Fun - Pamphlet BooksducareliNoch keine Bewertungen
- 20171025141013chapter-3 Chi-Square-Test PDFDokument28 Seiten20171025141013chapter-3 Chi-Square-Test PDFNajwa WawaNoch keine Bewertungen
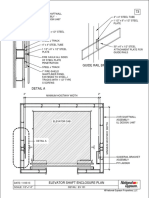
- Guide Rail Bracket AssemblyDokument1 SeiteGuide Rail Bracket AssemblyPrasanth VarrierNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Lesson Plan Outline - Rebounding - Perez - JoseDokument7 SeitenLesson Plan Outline - Rebounding - Perez - JoseJose PerezNoch keine Bewertungen
- Aui2601 Exam Pack 2016 1Dokument57 SeitenAui2601 Exam Pack 2016 1ricara alexia moodleyNoch keine Bewertungen
- CV's of M.ishtiaqDokument3 SeitenCV's of M.ishtiaqishtiaqNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Consumer PresentationDokument30 SeitenConsumer PresentationShafiqur Rahman KhanNoch keine Bewertungen
- Fashion Goes VirtualDokument1 SeiteFashion Goes VirtualJessica MichaultNoch keine Bewertungen
- Phrasal Verbs en Inglés.Dokument2 SeitenPhrasal Verbs en Inglés.David Alexander Palomo QuirozNoch keine Bewertungen
- Amazon Tax Information InterviewDokument2 SeitenAmazon Tax Information Interviewasad nNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- HearstDokument16 SeitenHearstapi-602711853Noch keine Bewertungen
- General LPG Installation Guide PDFDokument60 SeitenGeneral LPG Installation Guide PDFgheorghe garduNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)