Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Raft FoundationDokument140 SeitenRaft Foundationsurajoffshore100% (14)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- ETABS Check List 03-01-2011Dokument14 SeitenETABS Check List 03-01-2011KmrnKhn100% (1)
- Hydraulic Remote ControlsDokument64 SeitenHydraulic Remote Controlswalk111Noch keine Bewertungen
- Iso 8686-1Dokument34 SeitenIso 8686-1Matllan100% (1)
- Design of RCC Box 1 X 2.0 M X 2.0m-300mm Cushion-2Dokument220 SeitenDesign of RCC Box 1 X 2.0 M X 2.0m-300mm Cushion-2HegdeVenugopalNoch keine Bewertungen
- AASHTO Guide Specifications For Design of Pedestrian Bridges 2009 (Draft)Dokument17 SeitenAASHTO Guide Specifications For Design of Pedestrian Bridges 2009 (Draft)Laurence Arcon Banal0% (1)
- Load Path PDFDokument12 SeitenLoad Path PDFsyed Affan100% (1)
- Blast Resistant Design For Roof SystemDokument124 SeitenBlast Resistant Design For Roof SystemYam BalaoingNoch keine Bewertungen
- Design and EstimationDokument67 SeitenDesign and EstimationjaffliangNoch keine Bewertungen
- Autodesk Inventor Pro 9 Stress Analysis (1) - Getting StartedDokument54 SeitenAutodesk Inventor Pro 9 Stress Analysis (1) - Getting StartedtumpalpnainggolanNoch keine Bewertungen
- Mil STD 1312BDokument44 SeitenMil STD 1312BgreatsteelNoch keine Bewertungen
- (Eng) Eurocode Training - En1990Dokument40 Seiten(Eng) Eurocode Training - En1990omosorNoch keine Bewertungen
- QCVN 03-2012BXD English PDFDokument20 SeitenQCVN 03-2012BXD English PDFDinh Viet HaiNoch keine Bewertungen
- UFC 4-152-01 Design of Piers and Wharves (2017)Dokument181 SeitenUFC 4-152-01 Design of Piers and Wharves (2017)EMTEENoch keine Bewertungen
- Sectional ValvesDokument107 SeitenSectional Valveswalk111Noch keine Bewertungen
- Selector ValvesDokument23 SeitenSelector Valveswalk111Noch keine Bewertungen
- 意大利casappa(凯斯帕)股份公司 Strada 定量斜轴式柱塞泵选型样本Dokument4 Seiten意大利casappa(凯斯帕)股份公司 Strada 定量斜轴式柱塞泵选型样本walk111Noch keine Bewertungen
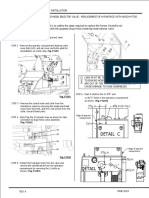
- Replacing Hyraforce With Argo-Hytos: Removal and Installation ProcedureDokument4 SeitenReplacing Hyraforce With Argo-Hytos: Removal and Installation Procedurewalk111Noch keine Bewertungen
- Fi 01 TestDokument1 SeiteFi 01 Testwalk111Noch keine Bewertungen
- brochureEC330C 22A1004307 200712 PDFDokument12 SeitenbrochureEC330C 22A1004307 200712 PDFwalk111Noch keine Bewertungen
- ADAMS/View Tools, Menus, and ShortcutsDokument14 SeitenADAMS/View Tools, Menus, and Shortcutswalk111Noch keine Bewertungen
- 移动式破碎机S ZR450JC规格说明书 PDFDokument1 Seite移动式破碎机S ZR450JC规格说明书 PDFwalk111Noch keine Bewertungen
- 695SR 26061062GBDokument16 Seiten695SR 26061062GBwalk111Noch keine Bewertungen
- 移动式破碎机S ZR450JC规格说明书Dokument1 Seite移动式破碎机S ZR450JC规格说明书walk111Noch keine Bewertungen
- Construction and Building Materials: N. Buratti, C. MazzottiDokument10 SeitenConstruction and Building Materials: N. Buratti, C. MazzottidrpNoch keine Bewertungen
- ASCE 7, AISC 360, and The Direct Analysis Method in The RAM Structural System - Structural Analysis and Design - Wiki - Structural Analysis and Design - Be Communities by BentleyDokument11 SeitenASCE 7, AISC 360, and The Direct Analysis Method in The RAM Structural System - Structural Analysis and Design - Wiki - Structural Analysis and Design - Be Communities by BentleygayalamNoch keine Bewertungen
- Earthquake Action in Australia - Background and ApplicationDokument10 SeitenEarthquake Action in Australia - Background and ApplicationThong NguyenNoch keine Bewertungen
- CalculationReport TimberBeam PDFDokument4 SeitenCalculationReport TimberBeam PDFMoz NazNoch keine Bewertungen
- Finite Element Analysis of Connecting Rod For Two Wheeler and Optimization of Suitable Material Under Static Load ConditionDokument7 SeitenFinite Element Analysis of Connecting Rod For Two Wheeler and Optimization of Suitable Material Under Static Load ConditionAnonymous CUPykm6DZNoch keine Bewertungen
- Analysis and Design of Prestressed Concrete Box Girder BridgeDokument13 SeitenAnalysis and Design of Prestressed Concrete Box Girder BridgehimabindugvsdNoch keine Bewertungen
- SOP - Aerial Performer Rigging StandardsDokument1 SeiteSOP - Aerial Performer Rigging StandardsGustavNoch keine Bewertungen
- RWDI Proposal For Capitol Twin Peaks # 1700934PDokument12 SeitenRWDI Proposal For Capitol Twin Peaks # 1700934PSasanka TharakaNoch keine Bewertungen
- Nuruye AdaneDokument99 SeitenNuruye AdaneDesalegn MelknewNoch keine Bewertungen
- 000 The K-Span Technical ManualDokument90 Seiten000 The K-Span Technical ManualomermmkaNoch keine Bewertungen
- Waffle Slab: Grid LineDokument2 SeitenWaffle Slab: Grid LineOwaisAhmedNoch keine Bewertungen
- Evaluation of The Stiffness Effect of Pipe Supports in Relation To Static and Dynamic Loads in A Flexibility AnalysisDokument4 SeitenEvaluation of The Stiffness Effect of Pipe Supports in Relation To Static and Dynamic Loads in A Flexibility AnalysisIJAERS JOURNALNoch keine Bewertungen
- Chapter 1 - Stress Analysis (Intro)Dokument23 SeitenChapter 1 - Stress Analysis (Intro)asadNoch keine Bewertungen
- Civil2015 v2.1 Release NoteDokument29 SeitenCivil2015 v2.1 Release NoteAshish LoyaNoch keine Bewertungen
- 2014 Ncsea Common Errors in Seismic Design How To Avoid Them. T. Heausler PDFDokument5 Seiten2014 Ncsea Common Errors in Seismic Design How To Avoid Them. T. Heausler PDFmike wilsonNoch keine Bewertungen
- Simulation of Masonry in ANSYS and LS-DY PDFDokument15 SeitenSimulation of Masonry in ANSYS and LS-DY PDFaminNoch keine Bewertungen
- Bentley RM BridgeDokument4 SeitenBentley RM BridgephanoanhgtvtNoch keine Bewertungen