Das könnte Ihnen auch gefallen
- CCNA RST Forum- Converged Architecture BenefitsDokument65 SeitenCCNA RST Forum- Converged Architecture BenefitsRahul Vishwakarma100% (6)
- Marantz ReceiverDokument2 SeitenMarantz ReceiverRolando perez0% (1)
- Study Guide Chapter 2: Application Architectures & Networking ConceptsDokument11 SeitenStudy Guide Chapter 2: Application Architectures & Networking ConceptsGypsyNoch keine Bewertungen
- Flight Sim MakerDokument58 SeitenFlight Sim MakerRory PeychaNoch keine Bewertungen
- Hyundai D6GA Engine Mechanical System PDFDokument97 SeitenHyundai D6GA Engine Mechanical System PDFbrayandparavicinoNoch keine Bewertungen
- IIIIDokument46 SeitenIIIIkhasimNoch keine Bewertungen
- 256 CortesDokument6 Seiten256 Cortesgoyo2kNoch keine Bewertungen
- Modem Technology GuideDokument35 SeitenModem Technology GuideJose Leonardo Simancas GarciaNoch keine Bewertungen
- Data Communication and Computer NetworksDokument72 SeitenData Communication and Computer Networksmelkamu endaleNoch keine Bewertungen
- Zigbee ReportDokument61 SeitenZigbee Reportvarnul0% (1)
- Priority SlotDokument6 SeitenPriority Slotravijangde10Noch keine Bewertungen
- Eng OdgovoriDokument5 SeitenEng OdgovoriVedran MendelskiNoch keine Bewertungen
- Advanced Electronic Protection System To Prevent Exam Paper LeakagesDokument135 SeitenAdvanced Electronic Protection System To Prevent Exam Paper LeakagesSyed Viquar AhmedNoch keine Bewertungen
- Osi ModelDokument11 SeitenOsi ModelMu Asif KhNoch keine Bewertungen
- VOIPDokument79 SeitenVOIPKhalid Khalifa AtyaNoch keine Bewertungen
- Literature Review On GSM Based Notice BoardDokument8 SeitenLiterature Review On GSM Based Notice Boardc5qd4nn8100% (1)
- NETWORKINGDokument5 SeitenNETWORKINGJasto MeemeNoch keine Bewertungen
- DCN NotesDokument131 SeitenDCN NotesGuzhal HariNoch keine Bewertungen
- Introduction To Cdma: Code Division Multiple Access (CDMA) Is A Radically New Concept in WirelessDokument24 SeitenIntroduction To Cdma: Code Division Multiple Access (CDMA) Is A Radically New Concept in WirelessMohamed Abdel MonemNoch keine Bewertungen
- MODULE 2 - Networking FundamentalsDokument4 SeitenMODULE 2 - Networking Fundamentalsjohn doeNoch keine Bewertungen
- Communication NetworkDokument25 SeitenCommunication NetworkrbmengalNoch keine Bewertungen
- Advanced Data ComzDokument64 SeitenAdvanced Data ComzMusariri TalentNoch keine Bewertungen
- 2.1 Embedded SystemsDokument44 Seiten2.1 Embedded SystemsAakash SheelvantNoch keine Bewertungen
- Classify Modems According To Synchronization Ans:: Data Communication Question Bank Fifth Semester CS & ITDokument19 SeitenClassify Modems According To Synchronization Ans:: Data Communication Question Bank Fifth Semester CS & ITNicky SanthoshNoch keine Bewertungen
- CN Individual Assignment - Tasnim Tasfia SrishtyDokument8 SeitenCN Individual Assignment - Tasnim Tasfia SrishtyShiraj-Us-Salahin IslamNoch keine Bewertungen
- Iot QBDokument5 SeitenIot QBAdil QureshiNoch keine Bewertungen
- Wireless Video Services in CDMA SystemsDokument26 SeitenWireless Video Services in CDMA SystemsNeha Upadhyay100% (1)
- An Overview of Controller Area Network (CAN) Technology: November 12, 2003Dokument20 SeitenAn Overview of Controller Area Network (CAN) Technology: November 12, 2003Dilyan MarinoffNoch keine Bewertungen
- Task 1-Networking Infrastructure and ProtocolsDokument5 SeitenTask 1-Networking Infrastructure and ProtocolsShiraj-Us-Salahin IslamNoch keine Bewertungen
- Cyberops (200-201) Chapter 1 & 2Dokument95 SeitenCyberops (200-201) Chapter 1 & 2Saransh GoswamiNoch keine Bewertungen
- Modem: A Quick History of The ModemDokument4 SeitenModem: A Quick History of The ModemIas Aspirant AbhiNoch keine Bewertungen
- Term Paper On Osi ModelDokument5 SeitenTerm Paper On Osi Modelfrqofvbnd100% (1)
- CS3099 Software Team Project: Group Report: A. Bell, M. Brock, A. Buckland, C. Garrigan, and T. LiangDokument11 SeitenCS3099 Software Team Project: Group Report: A. Bell, M. Brock, A. Buckland, C. Garrigan, and T. Liangadb39Noch keine Bewertungen
- A Modem Modulates Outgoing Digital Signals From A Computer or Other Digital Device To Analog SignDokument2 SeitenA Modem Modulates Outgoing Digital Signals From A Computer or Other Digital Device To Analog SignJIFFI21Noch keine Bewertungen
- Final EmbededDokument31 SeitenFinal EmbededAshish OjhaNoch keine Bewertungen
- Data Communication Systems: Receiver (Sink) Sender (Source) MediumDokument27 SeitenData Communication Systems: Receiver (Sink) Sender (Source) MediumAshish PaswanNoch keine Bewertungen
- Dwnload Full Hands On Networking Fundamentals 2nd Edition Michael Palmer Solutions Manual PDFDokument36 SeitenDwnload Full Hands On Networking Fundamentals 2nd Edition Michael Palmer Solutions Manual PDFmonzingoyer2465100% (9)
- Assignment: Submitted ToDokument11 SeitenAssignment: Submitted ToMuqaddas FatimaNoch keine Bewertungen
- Computer Networking CourseworkDokument8 SeitenComputer Networking Courseworkujsqjljbf100% (2)
- Full Download Hands On Networking Fundamentals 2nd Edition Michael Palmer Solutions ManualDokument36 SeitenFull Download Hands On Networking Fundamentals 2nd Edition Michael Palmer Solutions Manualfinnikin.fibularjp49100% (36)
- A Handbook For Successful VOIPDokument13 SeitenA Handbook For Successful VOIPtelephonicaNoch keine Bewertungen
- Computer Networking Thesis SampleDokument7 SeitenComputer Networking Thesis SamplePaperWritingServicePortland100% (2)
- Multi-User Chat System Project ReportDokument18 SeitenMulti-User Chat System Project Reportjayashree rajNoch keine Bewertungen
- SMS Security SystemDokument41 SeitenSMS Security SystemAlp KonakNoch keine Bewertungen
- Assessment 1: Written QuestionsDokument6 SeitenAssessment 1: Written QuestionsBest Music OnlineNoch keine Bewertungen
- CDMA Simulation: Alison Hightman Elaine Chung Alejandra GalvanDokument30 SeitenCDMA Simulation: Alison Hightman Elaine Chung Alejandra GalvanericnaneNoch keine Bewertungen
- Networking EssentialsDokument16 SeitenNetworking EssentialsSujin Sathianesan SNoch keine Bewertungen
- Ethernet With 8051Dokument57 SeitenEthernet With 8051pradeepkverma100% (2)
- Mobile Computing NotesDokument21 SeitenMobile Computing Notesgiri deepeshNoch keine Bewertungen
- Technical Planning BWADokument27 SeitenTechnical Planning BWAmykeenzo5658Noch keine Bewertungen
- Four Characteristics of Multimedia SystemsDokument6 SeitenFour Characteristics of Multimedia Systemsaderaj getinetNoch keine Bewertungen
- Thesis About Voice CommandDokument8 SeitenThesis About Voice Commandjennyhillminneapolis100% (1)
- Zigbee Literature ReviewDokument22 SeitenZigbee Literature ReviewBhaskar Rao PNoch keine Bewertungen
- JCI Makeathon 2017 - Problem StatementsDokument5 SeitenJCI Makeathon 2017 - Problem StatementsMadhusudanan AshokNoch keine Bewertungen
- What Is NetworkDokument7 SeitenWhat Is Networkshripal singhNoch keine Bewertungen
- Network Monitoring Analysis Using Wireshark Tools (Term Project)Dokument19 SeitenNetwork Monitoring Analysis Using Wireshark Tools (Term Project)Md. Anisur RahmanNoch keine Bewertungen
- Java Network ProjectDokument20 SeitenJava Network ProjectabbasmulaniNoch keine Bewertungen
- GSM Based Patient Mono To RingDokument89 SeitenGSM Based Patient Mono To Rings12345unNoch keine Bewertungen
- Design of Vehicle Bus Data Acquisition and Fault Diagnosis System Using CANDokument4 SeitenDesign of Vehicle Bus Data Acquisition and Fault Diagnosis System Using CANseventhsensegroupNoch keine Bewertungen
- A Method For Implementing, Simulating and Analyzing A Voice Over Internet Protocol NetworkDokument5 SeitenA Method For Implementing, Simulating and Analyzing A Voice Over Internet Protocol NetworkKhoa Tran NgocNoch keine Bewertungen
- Topic#8 Communicating With Wired and Wireless Networks and DevicesDokument18 SeitenTopic#8 Communicating With Wired and Wireless Networks and DevicesAnas jahangirNoch keine Bewertungen
- Computer Networking Beginners Guide: An Introduction on Wireless Technology and Systems Security to Pass CCNA Exam, With a Hint of Linux Programming and Command LineVon EverandComputer Networking Beginners Guide: An Introduction on Wireless Technology and Systems Security to Pass CCNA Exam, With a Hint of Linux Programming and Command LineNoch keine Bewertungen
- Building Wireless Sensor Networks: Application to Routing and Data DiffusionVon EverandBuilding Wireless Sensor Networks: Application to Routing and Data DiffusionNoch keine Bewertungen
- B TechopenelectivesforiiiyearDokument118 SeitenB TechopenelectivesforiiiyearsunilkumareceNoch keine Bewertungen
- CHAPTER7Dokument10 SeitenCHAPTER7RoopaNarsiNoch keine Bewertungen
- COVID-19 Vaccination Appointment Details: Center Preferred Time SlotDokument1 SeiteCOVID-19 Vaccination Appointment Details: Center Preferred Time SlotAE SER 22 PWDNoch keine Bewertungen
- ARM Cortex-M3: An Improvement Overview: January 2011Dokument7 SeitenARM Cortex-M3: An Improvement Overview: January 2011RoopaNarsiNoch keine Bewertungen
- Q A M (QAM) : Uadrature Mplitude OdulationDokument22 SeitenQ A M (QAM) : Uadrature Mplitude OdulationAanandha SaravananNoch keine Bewertungen
- St. Peter's EC Dept Course FileDokument45 SeitenSt. Peter's EC Dept Course FileRoopaNarsiNoch keine Bewertungen
- G Narsimhulu PublicationsDokument1 SeiteG Narsimhulu PublicationsRoopaNarsiNoch keine Bewertungen
- Icscsp 2018 Volume 2Dokument765 SeitenIcscsp 2018 Volume 2RoopaNarsiNoch keine Bewertungen
- Chapter-8 (Digital Ic'S and Logic Families)Dokument27 SeitenChapter-8 (Digital Ic'S and Logic Families)RoopaNarsiNoch keine Bewertungen
- Section4-Attandance q2 PDFDokument1 SeiteSection4-Attandance q2 PDFRoopaNarsiNoch keine Bewertungen
- Efficient Route Identification Method For Secure Packets Transfer in ManetDokument5 SeitenEfficient Route Identification Method For Secure Packets Transfer in ManetRoopaNarsiNoch keine Bewertungen
- Mood Board: An Iot Based Group Mood Evaluation Tool: Shikhar Makhija Bimlesh WadhwaDokument7 SeitenMood Board: An Iot Based Group Mood Evaluation Tool: Shikhar Makhija Bimlesh WadhwaRoopaNarsiNoch keine Bewertungen
- Conventional Mix Design of m25 Grade Concrete Containing Flyash As A Partial Replacement Material To The Cement and Disposal Concrete AggregateDokument1 SeiteConventional Mix Design of m25 Grade Concrete Containing Flyash As A Partial Replacement Material To The Cement and Disposal Concrete AggregateRoopaNarsiNoch keine Bewertungen
- Aec3 PDFDokument114 SeitenAec3 PDFRoopaNarsiNoch keine Bewertungen
- Aec03 1Dokument351 SeitenAec03 1sethiaashishNoch keine Bewertungen
- Aec03 1Dokument351 SeitenAec03 1sethiaashishNoch keine Bewertungen
- WSU quiz examines AM communication systemsDokument2 SeitenWSU quiz examines AM communication systemsRoopaNarsiNoch keine Bewertungen
- Bee Examination For FX Grade PDFDokument3 SeitenBee Examination For FX Grade PDFRoopaNarsiNoch keine Bewertungen
- Wolaita Sodo University attendance sheet for communication systems quizDokument1 SeiteWolaita Sodo University attendance sheet for communication systems quizRoopaNarsiNoch keine Bewertungen
- Section 4 AttandanceDokument2 SeitenSection 4 AttandanceRoopaNarsiNoch keine Bewertungen
- Design of Greenhouse Control System Based On Wireless Sensor Networks and AVR MicrocontrollerDokument7 SeitenDesign of Greenhouse Control System Based On Wireless Sensor Networks and AVR MicrocontrollerNhâtTânNoch keine Bewertungen
- Wolaita Sodo University attendance sheetDokument1 SeiteWolaita Sodo University attendance sheetRoopaNarsiNoch keine Bewertungen
- 1.1 Introduction and Importance of Communication Systems: Chapter-1Dokument22 Seiten1.1 Introduction and Importance of Communication Systems: Chapter-1RoopaNarsiNoch keine Bewertungen
- Section:2: Course:Introduction To Communications SystemsDokument2 SeitenSection:2: Course:Introduction To Communications SystemsRoopaNarsiNoch keine Bewertungen
- 1 Electric FieldsDokument37 Seiten1 Electric FieldsEly DalimanNoch keine Bewertungen
- N5625 1Dokument25 SeitenN5625 1RoopaNarsiNoch keine Bewertungen
- OscilloscopeDokument5 SeitenOscilloscopetechieindiaNoch keine Bewertungen
- Section:2: Course:Introduction To Communications SystemsDokument2 SeitenSection:2: Course:Introduction To Communications SystemsRoopaNarsiNoch keine Bewertungen
- Wolaita Sodo University Internship Evaluation ReportDokument1 SeiteWolaita Sodo University Internship Evaluation ReportRoopaNarsiNoch keine Bewertungen
- Rockwell Collins 400 Collins Road NE Cedar Rapids, IA 52498 319.295.1000Dokument190 SeitenRockwell Collins 400 Collins Road NE Cedar Rapids, IA 52498 319.295.1000Carlos Silva100% (1)
- Pulse Oximeter Schematics Rev DDokument2 SeitenPulse Oximeter Schematics Rev DRene Gonzales VasquezNoch keine Bewertungen
- Riso GR 3750 SwitchDokument1 SeiteRiso GR 3750 Switchrosa carraraNoch keine Bewertungen
- EmtlDokument707 SeitenEmtlLaxmiSahithi100% (1)
- Led RGB MatrixDokument18 SeitenLed RGB MatrixJorge Arévalo MilletNoch keine Bewertungen
- Unids6 Manual v100Dokument24 SeitenUnids6 Manual v100oya27910Noch keine Bewertungen
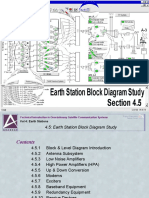
- Earth Station Block Diagram Study: Section 5Dokument213 SeitenEarth Station Block Diagram Study: Section 5Extreme DaysNoch keine Bewertungen
- Hoja de Datos PLC 1762:L4Dokument35 SeitenHoja de Datos PLC 1762:L4Martin GuzmanNoch keine Bewertungen
- Combinational+Sequential DesignDokument403 SeitenCombinational+Sequential DesignTolesa ShoreNoch keine Bewertungen
- Ultravox - Distriaudio catalog with PA speaker models and pricesDokument2 SeitenUltravox - Distriaudio catalog with PA speaker models and pricesFabian MedinaNoch keine Bewertungen
- Three Stage Nested Miller Low - Voltage AmplifierDokument19 SeitenThree Stage Nested Miller Low - Voltage Amplifierapi-19646514Noch keine Bewertungen
- CRODokument29 SeitenCROemilyNoch keine Bewertungen
- Three Phase Sources and Loads CalculationsDokument25 SeitenThree Phase Sources and Loads CalculationsRajeev ValunjkarNoch keine Bewertungen
- RF Integrated Circuits Mid-Term ExamDokument1 SeiteRF Integrated Circuits Mid-Term Examsreekanth2728Noch keine Bewertungen
- MultiplexingDokument38 SeitenMultiplexingBindhya Basini Mishra0% (1)
- Gallien Krueger Mb150s 150e Service ManualDokument21 SeitenGallien Krueger Mb150s 150e Service Manualmichael brahemschaNoch keine Bewertungen
- PDF Split PDFDokument24 SeitenPDF Split PDFAayush guptaNoch keine Bewertungen
- MatchboxDokument2 SeitenMatchboxCastro CarlosNoch keine Bewertungen
- 10 Instruction Sheet DOP B07S410Dokument2 Seiten10 Instruction Sheet DOP B07S410Nisar AhmedNoch keine Bewertungen
- Astable & Monostable Multivibrator CircuitsDokument4 SeitenAstable & Monostable Multivibrator CircuitsJiva 1107Noch keine Bewertungen
- TX-1000 OwnerManualDokument16 SeitenTX-1000 OwnerManualPato LankenauNoch keine Bewertungen
- Ieee PaperDokument6 SeitenIeee PaperJayant OjhaNoch keine Bewertungen
- Navigating with VOR: Understanding VHF Omnidirectional Range SystemsDokument3 SeitenNavigating with VOR: Understanding VHF Omnidirectional Range SystemsFahmi PrayogiNoch keine Bewertungen
- ELE 3305 Power Supply DesignDokument23 SeitenELE 3305 Power Supply DesignMuhammad SalisNoch keine Bewertungen
- Homework Assignment #3 Graphical Construction Techniques Unit 8.2Dokument3 SeitenHomework Assignment #3 Graphical Construction Techniques Unit 8.2Srinivasarao KavurUNoch keine Bewertungen
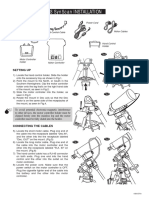
- EQ3 SynScan INSTALLATION guideDokument1 SeiteEQ3 SynScan INSTALLATION guideOscar MalamudNoch keine Bewertungen
- Linear Electric Actuators and Generators ReviewDokument6 SeitenLinear Electric Actuators and Generators ReviewsurenderbuddhaNoch keine Bewertungen