Das könnte Ihnen auch gefallen
- Practicas Con Pic 16f877aDokument160 SeitenPracticas Con Pic 16f877aJose G. Muñoz MikeryNoch keine Bewertungen
- InyectoraElectrohidráulica PDFDokument8 SeitenInyectoraElectrohidráulica PDFJuan DiazNoch keine Bewertungen
- Manual - Microprocesadores y Microcontroladores - MT.3.4.2-245 - 06Dokument144 SeitenManual - Microprocesadores y Microcontroladores - MT.3.4.2-245 - 06Abner Calva0% (1)
- Escalamiento Señales AnalógicasDokument3 SeitenEscalamiento Señales AnalógicasArte VidriosNoch keine Bewertungen
- Proyecto BalancinDokument23 SeitenProyecto BalancinDaniel AnchetaNoch keine Bewertungen
- Sistemas de Control Utp PDFDokument11 SeitenSistemas de Control Utp PDFAlexander Castillo MaytaNoch keine Bewertungen
- Dip Swicth y Siete Segmentos en ArduinoDokument20 SeitenDip Swicth y Siete Segmentos en Arduinojairo barriosNoch keine Bewertungen
- 5 Cinematica InversaDokument65 Seiten5 Cinematica InversaRichard Daniel Coro ArcayneNoch keine Bewertungen
- Digitalizacion de SeñalesDokument9 SeitenDigitalizacion de SeñalesCamila Erazo FigueroaNoch keine Bewertungen
- 3000 Watts Power Amplifier Class D Mosfet IRFP260 - IRFP4227 - Electronic CircuitDokument4 Seiten3000 Watts Power Amplifier Class D Mosfet IRFP260 - IRFP4227 - Electronic CircuitOlger Quintero Tapia100% (1)
- 2 - Servomotores y SensoresDokument59 Seiten2 - Servomotores y SensoresJose YepesNoch keine Bewertungen
- Torque de CargaDokument7 SeitenTorque de CargaSantiago MarquezNoch keine Bewertungen
- 152 Problemas Con Transistores ResueltosDokument15 Seiten152 Problemas Con Transistores ResueltosJorge CarreraNoch keine Bewertungen
- Digital I - P6 - ContadoresDokument6 SeitenDigital I - P6 - ContadoresOliver Gálvez ZavaletaNoch keine Bewertungen
- Interfazado General Del Computador (Sistema Mínimo)Dokument21 SeitenInterfazado General Del Computador (Sistema Mínimo)Luis PerezNoch keine Bewertungen
- Manual Basico Micrologix 1101Dokument14 SeitenManual Basico Micrologix 1101bazor10Noch keine Bewertungen
- Touch Con PICDokument8 SeitenTouch Con PICLucho AngelNoch keine Bewertungen
- Compobus DDokument30 SeitenCompobus DgreekoNoch keine Bewertungen
- PLC - s7200Dokument11 SeitenPLC - s7200gamh13Noch keine Bewertungen
- Control de Posición de Balancín Con Motor y HéliceDokument9 SeitenControl de Posición de Balancín Con Motor y HéliceGabriel AyalaNoch keine Bewertungen
- Manual Control PID Variador Powerflex 40Dokument4 SeitenManual Control PID Variador Powerflex 40dexter067Noch keine Bewertungen
- Ejer PropuestosDokument6 SeitenEjer PropuestosRicardo BarrionuevoNoch keine Bewertungen
- Interrupciones en Mikroc: Una Ayuda Muy Valiosa: IntroducciónDokument6 SeitenInterrupciones en Mikroc: Una Ayuda Muy Valiosa: IntroducciónlervinjcNoch keine Bewertungen
- PLC Modulo em 235Dokument7 SeitenPLC Modulo em 235Dennis BurgasiNoch keine Bewertungen
- Módulo L298NDokument7 SeitenMódulo L298NHe Gal CiaNoch keine Bewertungen
- Practica de Unidad UartDokument53 SeitenPractica de Unidad UartLizzy GómezNoch keine Bewertungen
- Conversor Digital A AnalogoDokument58 SeitenConversor Digital A AnalogoCynthia Garcia100% (1)
- Informe9 ValdviezoD LombeidaD LabRI GR31Dokument8 SeitenInforme9 ValdviezoD LombeidaD LabRI GR31Diego ValdiviezoNoch keine Bewertungen
- Tipos de FusesDokument6 SeitenTipos de FusesIsaac Zavala100% (1)
- Lab9 PWM Con Pic 16f877a Con MikroBasicDokument5 SeitenLab9 PWM Con Pic 16f877a Con MikroBasicAlejandro SánchezNoch keine Bewertungen
- Codificador Teclado - CI 74C922 PDFDokument1 SeiteCodificador Teclado - CI 74C922 PDFJhonatan montoyaNoch keine Bewertungen
- Tarea Control BombasDokument3 SeitenTarea Control BombasLeonardo PaulNoch keine Bewertungen
- Convertidor CD-CD Aislado Tipo Push-Pull - Jorge Eduardo Briceño UronDokument14 SeitenConvertidor CD-CD Aislado Tipo Push-Pull - Jorge Eduardo Briceño UronJorge Eduardo Briceño UrónNoch keine Bewertungen
- (PDF) LVDTDokument6 Seiten(PDF) LVDTMichael RojasNoch keine Bewertungen
- Manual Usuario Entrenador Universal Pic18Dokument12 SeitenManual Usuario Entrenador Universal Pic18Carlos CastilloNoch keine Bewertungen
- Informe TemporizadoresDokument11 SeitenInforme Temporizadoresfer100% (1)
- 01 - Introduccion Al PLCDokument25 Seiten01 - Introduccion Al PLCOmar Alex Meléndez HuamánNoch keine Bewertungen
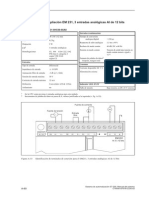
- A.33 Módulo de Ampliación EM 231, 3 Entradas Analógicas AI de 12 BitsDokument9 SeitenA.33 Módulo de Ampliación EM 231, 3 Entradas Analógicas AI de 12 BitsmcsecNoch keine Bewertungen
- Clase 10 CAN Bus y LONworks PDFDokument21 SeitenClase 10 CAN Bus y LONworks PDFEliana Mamani PairumaniNoch keine Bewertungen
- Tutorial ServomotorDokument50 SeitenTutorial ServomotorMartin Silva Mendoza50% (2)
- Memoria EPROMDokument42 SeitenMemoria EPROMJohn Alexander Hidalgo100% (1)
- 4.2 Rectificacion Controlada V3.0Dokument61 Seiten4.2 Rectificacion Controlada V3.0dani385arNoch keine Bewertungen
- Multiplexor Con PIC16F877ADokument7 SeitenMultiplexor Con PIC16F877AJoel Caballero Zabaleta100% (1)
- Identificación Paramétrica de Una Planta de Primer Orden Por Mínimos CuadradosDokument12 SeitenIdentificación Paramétrica de Una Planta de Primer Orden Por Mínimos CuadradosArmando Vázquez RamírezNoch keine Bewertungen
- Práctica 3. Tiristor - Rectificador Controlado de Silicio (SCR)Dokument8 SeitenPráctica 3. Tiristor - Rectificador Controlado de Silicio (SCR)aleNoch keine Bewertungen
- Arranque Motor Trifasico en Red MonofasicaDokument1 SeiteArranque Motor Trifasico en Red Monofasicavicente manuel castello bioscaNoch keine Bewertungen
- Guia 2.1. Laboratorio Comunicacion Profibus DPDokument5 SeitenGuia 2.1. Laboratorio Comunicacion Profibus DPpatrick corcueraNoch keine Bewertungen
- Manual de Usuario RN Tri 220-220vac 15kva-60kva 5pDokument5 SeitenManual de Usuario RN Tri 220-220vac 15kva-60kva 5pMiguel Angel FerreiraNoch keine Bewertungen
- Inversor MonofasicoDokument7 SeitenInversor MonofasicojohnNoch keine Bewertungen
- Pract. CuatroDokument13 SeitenPract. CuatroJOSE DANIEL ADAME SUAZONoch keine Bewertungen
- Informe Motor Paso A PasoDokument9 SeitenInforme Motor Paso A PasoGonzalo David Unzueta EchalarNoch keine Bewertungen
- PreparatorioDokument5 SeitenPreparatorioAntonio TobarNoch keine Bewertungen
- Informe Accionamientos Eléctricos: Sensores de Corriente y VoltajeDokument6 SeitenInforme Accionamientos Eléctricos: Sensores de Corriente y VoltajeCarolina BastidasNoch keine Bewertungen
- Configuración Salidas PLC Delta SX2Dokument6 SeitenConfiguración Salidas PLC Delta SX2Javier CamachoNoch keine Bewertungen
- Control de Motores DC y ServomotoresDokument6 SeitenControl de Motores DC y ServomotoresGabrielmatius GaboNoch keine Bewertungen
- Modelamiento Matemático de Un Tanque de Nivel - Funcion TransferenciaDokument5 SeitenModelamiento Matemático de Un Tanque de Nivel - Funcion TransferenciaAlberto Bardalez AricaNoch keine Bewertungen
- Control PID de Velocidad Del Motor DCDokument4 SeitenControl PID de Velocidad Del Motor DCJherson Andrade Tenorio100% (1)
- Caracteristicas Del Sistema de Control en CascadaDokument3 SeitenCaracteristicas Del Sistema de Control en CascadaRoland CaixaNoch keine Bewertungen
- Arranque de Un Generador de Corriente ContinuaDokument33 SeitenArranque de Un Generador de Corriente ContinuaWalther DuránNoch keine Bewertungen
- Implementacion de Un Controlador Pid Con Una Fpga para Posicionar Un Motor DCDokument15 SeitenImplementacion de Un Controlador Pid Con Una Fpga para Posicionar Un Motor DCMayte BecerrilNoch keine Bewertungen
- Motor DSPICDokument10 SeitenMotor DSPICGustavo Choque CuevaNoch keine Bewertungen
- Control de Velocidad y Posición de Un Motor DCDokument56 SeitenControl de Velocidad y Posición de Un Motor DCromulozg100% (1)
- CONTROL PID APLICADO SOBRE Variador Con Tia Portal 11 PDFDokument6 SeitenCONTROL PID APLICADO SOBRE Variador Con Tia Portal 11 PDFbenditasea3352Noch keine Bewertungen
- Equipo 6 Practica 10Dokument27 SeitenEquipo 6 Practica 10Jorge david Flores CruzNoch keine Bewertungen
- Informe #4: Caracterización de Transistores FET y Análisis Amplificador Con Transistor FETDokument9 SeitenInforme #4: Caracterización de Transistores FET y Análisis Amplificador Con Transistor FETKEVIN NI?O TEJADANoch keine Bewertungen
- Practica 10 MosfetDokument7 SeitenPractica 10 MosfetAngel Dariel del JesusNoch keine Bewertungen
- Resumen Epa U1 CardenaslopezjpDokument14 SeitenResumen Epa U1 CardenaslopezjpLopez PabloNoch keine Bewertungen
- 325965222-Mosfet JoseDokument21 Seiten325965222-Mosfet JoseJosé Isai Campos JuarezNoch keine Bewertungen
- Filtro 5 BandasDokument153 SeitenFiltro 5 Bandasalex_gomezNoch keine Bewertungen
- PFC Raul Martin Delgado 29-06-2012Dokument180 SeitenPFC Raul Martin Delgado 29-06-2012Bryan GarciaNoch keine Bewertungen
- Guia Lab 2 Simulado Diseño de BoostDokument5 SeitenGuia Lab 2 Simulado Diseño de BoostDidac MessNoch keine Bewertungen
- Inversor de Voltaje MonografiaDokument81 SeitenInversor de Voltaje MonografiaPercy ÑcNoch keine Bewertungen
- Principios de Electronica-Parte2Dokument75 SeitenPrincipios de Electronica-Parte2alan696Noch keine Bewertungen
- Electronica Analoga ELMC 6082Dokument6 SeitenElectronica Analoga ELMC 6082Victor Andres Hernandez AriasNoch keine Bewertungen
- Practica 7 ElectrónicaDokument10 SeitenPractica 7 ElectrónicaVianny VMNoch keine Bewertungen
- Laboratorio 8-2Dokument10 SeitenLaboratorio 8-2David CastellanosNoch keine Bewertungen
- Informe Electronica de Potencia, TransistoresDokument6 SeitenInforme Electronica de Potencia, TransistoresJuan De La Cruz100% (1)
- Informe Electrónica Analógica UdeaDokument9 SeitenInforme Electrónica Analógica UdeaCamilo NúñezNoch keine Bewertungen
- Transistores FetDokument38 SeitenTransistores FetDiego VANoch keine Bewertungen
- Practica 4 Epa Puente H Mosfet 2019aDokument3 SeitenPractica 4 Epa Puente H Mosfet 2019aJaime GarciaNoch keine Bewertungen
- Capitulo 2 FETDokument32 SeitenCapitulo 2 FETLuisNoch keine Bewertungen
- Fuentes Conmutadas y LinealesDokument18 SeitenFuentes Conmutadas y LinealesLionelNoch keine Bewertungen
- Práctica 10 y 11 - Brigada 6Dokument12 SeitenPráctica 10 y 11 - Brigada 6julia gabriela hernandez nievesNoch keine Bewertungen
- Destellador Luces de Emergencia Con MOSFET - Electrónica UnicromDokument4 SeitenDestellador Luces de Emergencia Con MOSFET - Electrónica Unicromaudisistem8Noch keine Bewertungen
- Transistor Bipolar y MosfetDokument22 SeitenTransistor Bipolar y MosfetAitana Aranegui RodríguezNoch keine Bewertungen
- Resumen JFET y MOSFETDokument27 SeitenResumen JFET y MOSFETLuis Gerardo ArreolaNoch keine Bewertungen
- Polarizacion de Un MosfetDokument6 SeitenPolarizacion de Un MosfetPamelaLazoNoch keine Bewertungen
- Dispositivos Semiconductores de PotenciaDokument16 SeitenDispositivos Semiconductores de PotenciaJacob García HdezNoch keine Bewertungen
- Cuadro Comparativo Semiconductores de PotenciaDokument36 SeitenCuadro Comparativo Semiconductores de PotenciaAngel Peralta0% (1)
- Carro AlambricoDokument4 SeitenCarro AlambricoAdrii C. LopezNoch keine Bewertungen