Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Standard Operating Procedure Template - Single PageDokument1 SeiteStandard Operating Procedure Template - Single PagetesNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Maxillofacial Trauma and Management - Dental Ebook & Lecture Notes PDF Download (Studynama - Com - India's Biggest Website For BDS Study Material Downloads)Dokument24 SeitenMaxillofacial Trauma and Management - Dental Ebook & Lecture Notes PDF Download (Studynama - Com - India's Biggest Website For BDS Study Material Downloads)Vinnie SinghNoch keine Bewertungen
- Kiani v. Bureau of Immigration and Deportation, GR No. 160922, 27 ESCRADokument19 SeitenKiani v. Bureau of Immigration and Deportation, GR No. 160922, 27 ESCRAmheritzlynNoch keine Bewertungen
- HP Deskjet Printer Supply ChainDokument19 SeitenHP Deskjet Printer Supply ChainJose Barnon86% (7)
- Vol II - PIM (Feasibility Report) For Resort at ChorwadDokument42 SeitenVol II - PIM (Feasibility Report) For Resort at Chorwadmyvin jovi denzilNoch keine Bewertungen
- National School Building Inventory (NSBI) Encoding For SY 2021-2022Dokument31 SeitenNational School Building Inventory (NSBI) Encoding For SY 2021-2022Renato Rivera100% (1)
- DTR For ReadingDokument2 SeitenDTR For ReadingTimosa TeyobNoch keine Bewertungen
- River Planning AetasDokument4 SeitenRiver Planning AetasErika ReyesNoch keine Bewertungen
- Technical Schedule World BankDokument249 SeitenTechnical Schedule World BankPramod ShastryNoch keine Bewertungen
- ME232 Thermodynamics 2 Quiz 1 - P1&P3 Complete SolutionDokument2 SeitenME232 Thermodynamics 2 Quiz 1 - P1&P3 Complete Solutioncarlverano0428Noch keine Bewertungen
- Defining The Audiovisual IndustryDokument20 SeitenDefining The Audiovisual IndustryAyoub Ait MahmoudNoch keine Bewertungen
- WabimalunoxowevefoDokument3 SeitenWabimalunoxowevefoChitmin KhantNoch keine Bewertungen
- Ems Accounting Term 2Dokument39 SeitenEms Accounting Term 2Paballo KoopediNoch keine Bewertungen
- Management of Health Care Services For Ood Victims: The Case of The Shelter at Nakhon Pathom Rajabhat University Central ThailandDokument7 SeitenManagement of Health Care Services For Ood Victims: The Case of The Shelter at Nakhon Pathom Rajabhat University Central ThailandAnonymous C06qenyfkmNoch keine Bewertungen
- The Passport: Gate Valve TYPE: "SCH 160"Dokument25 SeitenThe Passport: Gate Valve TYPE: "SCH 160"CE CERTIFICATENoch keine Bewertungen
- Product Sold by APPLE AustraliaDokument1 SeiteProduct Sold by APPLE AustraliaImran KhanNoch keine Bewertungen
- Activity Diagram 1Dokument14 SeitenActivity Diagram 1Yousef GamalNoch keine Bewertungen
- Editing Packs I Maybe Will NeedDokument3 SeitenEditing Packs I Maybe Will NeedMijo SusićNoch keine Bewertungen
- Arti ResearchDokument10 SeitenArti Researcharti nongbetNoch keine Bewertungen
- 1.3.2 SIC/XE Machine Architecture: 1 Megabytes (1024 KB) in Memory 3 Additional Registers, 24 Bits in LengthDokument8 Seiten1.3.2 SIC/XE Machine Architecture: 1 Megabytes (1024 KB) in Memory 3 Additional Registers, 24 Bits in LengthSENTHILKUMAR PNoch keine Bewertungen
- Part 04 - Plumbing, Mechanical & Firefighting SpecificationsDokument210 SeitenPart 04 - Plumbing, Mechanical & Firefighting Specificationsvtalex100% (1)
- Brigada EskwelaDokument4 SeitenBrigada EskwelaJas Dela Serna SerniculaNoch keine Bewertungen
- Read Me - CADWorx Plant 2019 SP2 HF1Dokument4 SeitenRead Me - CADWorx Plant 2019 SP2 HF1Himanshu Patel (Himan)Noch keine Bewertungen
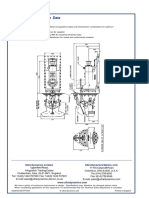
- Ultrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedDokument2 SeitenUltrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedhaujesNoch keine Bewertungen
- Brochure PVM enDokument36 SeitenBrochure PVM enBenny Kurniawan LimNoch keine Bewertungen
- Exp.1 (Screening) Group1Dokument16 SeitenExp.1 (Screening) Group1itokki otoyaNoch keine Bewertungen
- L - HRF22B0301 - Hose & Pulley Block (ZM, METRIC)Dokument5 SeitenL - HRF22B0301 - Hose & Pulley Block (ZM, METRIC)Gustavo RodriguezNoch keine Bewertungen
- Corrugated Horn AntennasDokument4 SeitenCorrugated Horn AntennasmiusayNoch keine Bewertungen
- Ten Rules of NetiquetteDokument11 SeitenTen Rules of NetiquetteAriel CancinoNoch keine Bewertungen
- 3-DatAdvantage Advanced Installation For NAS and Linux Platforms 8.6Dokument47 Seiten3-DatAdvantage Advanced Installation For NAS and Linux Platforms 8.6yaritzaNoch keine Bewertungen