Das könnte Ihnen auch gefallen
- ASIC TimingDokument54 SeitenASIC TimingKrishna MohanNoch keine Bewertungen
- Introduction To The I/O Buses Technical and Historical Background For The I/O BusesDokument9 SeitenIntroduction To The I/O Buses Technical and Historical Background For The I/O BusesshankyguptaNoch keine Bewertungen
- Wipro System On ChipDokument11 SeitenWipro System On Chipprodip7Noch keine Bewertungen
- Extraction and Simulation of Complex Silicon Interposer Structures GIT2012Dokument20 SeitenExtraction and Simulation of Complex Silicon Interposer Structures GIT2012Văn CôngNoch keine Bewertungen
- Introduction To Asics: Ni Logic Pvt. LTD., PuneDokument84 SeitenIntroduction To Asics: Ni Logic Pvt. LTD., PuneankurNoch keine Bewertungen
- Minimizing RF PCB Electromagnetic Emissions: TutorialDokument4 SeitenMinimizing RF PCB Electromagnetic Emissions: TutorialsundarvrpNoch keine Bewertungen
- UG0586 User Guide RTG4 FPGA Clocking ResourcesDokument82 SeitenUG0586 User Guide RTG4 FPGA Clocking ResourcesNguyen Van ToanNoch keine Bewertungen
- Haps-54 March2009 ManualDokument74 SeitenHaps-54 March2009 Manualjohn92691Noch keine Bewertungen
- 4 1.soc EncounterDokument181 Seiten4 1.soc Encounterachew911Noch keine Bewertungen
- Application of UartDokument53 SeitenApplication of Uartvarsha8108100% (1)
- Arduino-Based Embedded System ModuleDokument8 SeitenArduino-Based Embedded System ModuleIJRASETPublicationsNoch keine Bewertungen
- SCT 4 Platform Design Spec Rev1 4 PDFDokument62 SeitenSCT 4 Platform Design Spec Rev1 4 PDFChhoemSovannNoch keine Bewertungen
- Implementing A Source Synchronous Interface v2.0Dokument47 SeitenImplementing A Source Synchronous Interface v2.0Gautham PopuriNoch keine Bewertungen
- DSD 12 Synchronous DesignDokument9 SeitenDSD 12 Synchronous DesignDavis AbrahamNoch keine Bewertungen
- Fpga TutorialDokument10 SeitenFpga Tutorialgsavithri_4017Noch keine Bewertungen
- Waqar Hussain, Jari Nurmi, Jouni Isoaho, Fabio Garzia - Computing Platforms For Software-Defined Radio-Springer (2017)Dokument241 SeitenWaqar Hussain, Jari Nurmi, Jouni Isoaho, Fabio Garzia - Computing Platforms For Software-Defined Radio-Springer (2017)Felipe BaltorNoch keine Bewertungen
- Primetime: User Guide: Distributed Multiscenario AnalysisDokument95 SeitenPrimetime: User Guide: Distributed Multiscenario AnalysisYongwoo KimNoch keine Bewertungen
- SynopsysDokument20 SeitenSynopsysbennettmatthewNoch keine Bewertungen
- Intel® Core™ Voltage Regulator-Down (VRD) 11.1 - Processor Power Delivery Design GuidelinesDokument132 SeitenIntel® Core™ Voltage Regulator-Down (VRD) 11.1 - Processor Power Delivery Design Guidelinesaqua01Noch keine Bewertungen
- Vlsi RecordDokument61 SeitenVlsi RecordRaghul MNoch keine Bewertungen
- 2.sys Bus ArchDokument14 Seiten2.sys Bus ArchChar MondeNoch keine Bewertungen
- Design Choices - EthernetDokument29 SeitenDesign Choices - EthernetJasmine MysticaNoch keine Bewertungen
- Low Power Design of Digital SystemsDokument28 SeitenLow Power Design of Digital SystemssuperECENoch keine Bewertungen
- Advance Embedded System Design: Shibu K VDokument73 SeitenAdvance Embedded System Design: Shibu K VBhavya Reddy75% (4)
- VHDL PDFDokument112 SeitenVHDL PDFvivek patelNoch keine Bewertungen
- Zynq 7020Dokument4 SeitenZynq 7020NGUYỄN HOÀNG LINHNoch keine Bewertungen
- SPI I2C Interface AnDokument13 SeitenSPI I2C Interface AnNivin PaulNoch keine Bewertungen
- Fpga DSP WhitepaperDokument15 SeitenFpga DSP Whitepaperzohair_r66Noch keine Bewertungen
- Group 12 ReportDokument18 SeitenGroup 12 ReportPoonam GuptaNoch keine Bewertungen
- Fpga Programming Using Verilog HDL LanguageDokument89 SeitenFpga Programming Using Verilog HDL LanguageSidhartha Sankar Rout0% (1)
- Palestra 4 Abram BelkDokument143 SeitenPalestra 4 Abram BelkThiago Rafael PrettoNoch keine Bewertungen
- All Ac379 AnDokument43 SeitenAll Ac379 AnsajusasiNoch keine Bewertungen
- Hardware DesignDokument42 SeitenHardware DesignSruthi PaletiNoch keine Bewertungen
- Build A Simple Computer: Lecturer: Pazir AhmadDokument80 SeitenBuild A Simple Computer: Lecturer: Pazir AhmadfayeqNoch keine Bewertungen
- Advanced Asic Chip SynthesisDokument126 SeitenAdvanced Asic Chip SynthesispravinNoch keine Bewertungen
- ARM7 9 FamilyDokument46 SeitenARM7 9 FamilySaravana KumarNoch keine Bewertungen
- Zynq 7000 TRMDokument1.770 SeitenZynq 7000 TRMSambhav VermanNoch keine Bewertungen
- Partitioning An ASICDokument6 SeitenPartitioning An ASICSwtz ZraonicsNoch keine Bewertungen
- ARM CortexDokument20 SeitenARM CortexivanmeyerNoch keine Bewertungen
- Xge Mac SpecDokument24 SeitenXge Mac Spechackdrag100% (1)
- FPGA Design Tutorial - Advanced HDL SynthesisDokument4 SeitenFPGA Design Tutorial - Advanced HDL SynthesisVIJAYPUTRANoch keine Bewertungen
- FPGA Design MethodologiesDokument9 SeitenFPGA Design MethodologiesSambhav VermanNoch keine Bewertungen
- Asic Interview QuestionsDokument2 SeitenAsic Interview Questionspritam044Noch keine Bewertungen
- Jitter PDFDokument21 SeitenJitter PDFJohn PapadogiannisNoch keine Bewertungen
- Case Studies of DDR Subsystem IntegrationDokument38 SeitenCase Studies of DDR Subsystem IntegrationpriyajeejoNoch keine Bewertungen
- Low Power VLSI Design: Abdulla K PDokument30 SeitenLow Power VLSI Design: Abdulla K PVijay KumarNoch keine Bewertungen
- Implementation of Digital Clock On FPGA: Industrial Training Report ONDokument26 SeitenImplementation of Digital Clock On FPGA: Industrial Training Report ONAdeel HashmiNoch keine Bewertungen
- Reference Manual: Date: 10/17/08Dokument31 SeitenReference Manual: Date: 10/17/08Abhishek RanjanNoch keine Bewertungen
- Lec20 RTL DesignDokument40 SeitenLec20 RTL DesignVrushali patilNoch keine Bewertungen
- DDR SDR Sdram ComparisionDokument12 SeitenDDR SDR Sdram ComparisionSrinivas CherukuNoch keine Bewertungen
- Chapter STA For Nanometer DesignsDokument33 SeitenChapter STA For Nanometer Designsfahad ghazali1Noch keine Bewertungen
- FPGA Training: by Ushasri Merugu 21 Dec 2012Dokument5 SeitenFPGA Training: by Ushasri Merugu 21 Dec 2012rkguptha_514369372Noch keine Bewertungen
- BS PDFDokument31 SeitenBS PDFRohith RajNoch keine Bewertungen
- Register and Its OperationsDokument56 SeitenRegister and Its OperationsSARTHAK VARSHNEYNoch keine Bewertungen
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionVon EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNoch keine Bewertungen
- High Efficiency RF and Microwave Solid State Power AmplifiersVon EverandHigh Efficiency RF and Microwave Solid State Power AmplifiersBewertung: 1 von 5 Sternen1/5 (1)
- Reference Manual Stm32Dokument1.133 SeitenReference Manual Stm32Thanh nhaNoch keine Bewertungen
- TMC603A ShortspecDokument1 SeiteTMC603A ShortspecM.k. JhaNoch keine Bewertungen
- Interrupts & Programming 8051 Hardware Interrupts: What Is InterruptDokument6 SeitenInterrupts & Programming 8051 Hardware Interrupts: What Is InterruptM.k. JhaNoch keine Bewertungen
- 162 LCDDokument9 Seiten162 LCDM.k. JhaNoch keine Bewertungen
- A PID ControllerDokument2 SeitenA PID ControllerM.k. JhaNoch keine Bewertungen
- A PID ControllerDokument2 SeitenA PID ControllerM.k. JhaNoch keine Bewertungen
- Adc and SensorDokument12 SeitenAdc and SensorM.k. JhaNoch keine Bewertungen
- Kernel BasicsDokument10 SeitenKernel BasicsM.k. JhaNoch keine Bewertungen
- AndroidDokument2 SeitenAndroidM.k. JhaNoch keine Bewertungen
- Pull-Up Resistors: A1ronzoDokument6 SeitenPull-Up Resistors: A1ronzoM.k. JhaNoch keine Bewertungen
- Kernel BasicsDokument10 SeitenKernel BasicsM.k. JhaNoch keine Bewertungen
- Number SystemsDokument30 SeitenNumber SystemsM.k. JhaNoch keine Bewertungen
- Number SystemsDokument30 SeitenNumber SystemsM.k. JhaNoch keine Bewertungen
- Lesson 6 - 1 Binary AdditionDokument12 SeitenLesson 6 - 1 Binary AdditionM.k. JhaNoch keine Bewertungen
- Number SystemsDokument30 SeitenNumber SystemsM.k. JhaNoch keine Bewertungen
- Lesson 6 - 1 Binary AdditionDokument12 SeitenLesson 6 - 1 Binary AdditionM.k. JhaNoch keine Bewertungen
- Digital Electronics Lab-I: Laboratory Manual (EEC-352)Dokument41 SeitenDigital Electronics Lab-I: Laboratory Manual (EEC-352)sneh22augNoch keine Bewertungen
- DMD Getting StartedDokument2 SeitenDMD Getting StartedGanjanGNoch keine Bewertungen
- VU Meter Circuit Stereo Mono 20 LED With PCBDokument9 SeitenVU Meter Circuit Stereo Mono 20 LED With PCBferdinandNoch keine Bewertungen
- Pratica 2Dokument14 SeitenPratica 2Eberton SantosNoch keine Bewertungen
- DatasheetDokument4 SeitenDatasheetGrupo EpufmNoch keine Bewertungen
- Figure For Question No. 1Dokument4 SeitenFigure For Question No. 1noybit mondalNoch keine Bewertungen
- Control A Cordless Drill Motor Using Zilog Encore F0830 PDFDokument17 SeitenControl A Cordless Drill Motor Using Zilog Encore F0830 PDFAlberto SequeiraNoch keine Bewertungen
- TP03AL220S03LSW 2W 85-265VAC Input 3.3VDC OutputDokument3 SeitenTP03AL220S03LSW 2W 85-265VAC Input 3.3VDC OutputtoppowerNoch keine Bewertungen
- Logic GateDokument12 SeitenLogic Gateapi-254068557Noch keine Bewertungen
- Application Note CTAN #349: Inverting The Sense of Speed Command SignalsDokument6 SeitenApplication Note CTAN #349: Inverting The Sense of Speed Command SignalsSam eagle goodNoch keine Bewertungen
- Anritsu - MS2830A Based PMR SolutionsDokument6 SeitenAnritsu - MS2830A Based PMR SolutionsScribdFgNoch keine Bewertungen
- Bizhub C652 C552 Theory of OperationDokument400 SeitenBizhub C652 C552 Theory of Operationtesla500Noch keine Bewertungen
- Ceraphant T PTC31, PTP31, PTP35: Technical InformationDokument24 SeitenCeraphant T PTC31, PTP31, PTP35: Technical InformationRenato Jose Genari LiraNoch keine Bewertungen
- CapacitorDokument5 SeitenCapacitorAina shivhareNoch keine Bewertungen
- Computer Notes OBJECTIVE Chapter #2 Class XI CompleteDokument12 SeitenComputer Notes OBJECTIVE Chapter #2 Class XI CompleteNabil Ahmed Khan71% (7)
- PCB Land Pattern DesignsDokument10 SeitenPCB Land Pattern DesignsGabriel SmolnyckiNoch keine Bewertungen
- Modelling of Interference Caused by Uplink Signal For Low Earth Orbiting Satellite Ground StationsDokument5 SeitenModelling of Interference Caused by Uplink Signal For Low Earth Orbiting Satellite Ground StationsMurthyNoch keine Bewertungen
- 1SFC132057M0201Dokument104 Seiten1SFC132057M0201Y.a. Ooi100% (1)
- A Generalized Approach For The Study of The Non Linear Behaviour PDFDokument5 SeitenA Generalized Approach For The Study of The Non Linear Behaviour PDFrenzomcuevaNoch keine Bewertungen
- Introduction About VFDDokument3 SeitenIntroduction About VFDHuzaifa WasimNoch keine Bewertungen
- El Book Manual RepotenciamientoDokument495 SeitenEl Book Manual RepotenciamientoJorge DiazNoch keine Bewertungen
- Rus DusDokument13 SeitenRus DusabhinavNoch keine Bewertungen
- Testing PTP Boundary ClocksDokument9 SeitenTesting PTP Boundary ClocksPOC TELKOMSELNoch keine Bewertungen
- 37PFL5332 LC7 (1) .1LDokument114 Seiten37PFL5332 LC7 (1) .1LWall BrysonNoch keine Bewertungen
- JW 5880200 GDokument18 SeitenJW 5880200 GMahmoudYasienMashhourNoch keine Bewertungen
- Paper Single Slope ADCDokument4 SeitenPaper Single Slope ADCArdittoTrianggada100% (1)
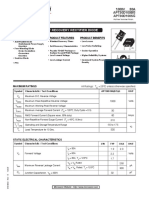
- Ultrafast Soft Recovery Rectifier Diode: Product Benefits Product Features Product ApplicationsDokument4 SeitenUltrafast Soft Recovery Rectifier Diode: Product Benefits Product Features Product ApplicationsEDER RIBEIRONoch keine Bewertungen
- Epec 2038 Control Unit: Technical DocumentDokument33 SeitenEpec 2038 Control Unit: Technical DocumentJoao SilvaNoch keine Bewertungen
- PLC MD300 PDFDokument108 SeitenPLC MD300 PDFerbarragansNoch keine Bewertungen
- Millman's Theorem: Chapter 10 - DC Network AnalysisDokument17 SeitenMillman's Theorem: Chapter 10 - DC Network AnalysisAce Dela CruzNoch keine Bewertungen