Das könnte Ihnen auch gefallen
- CV Shreyas GuptaDokument1 SeiteCV Shreyas GuptaShreyas GuptaNoch keine Bewertungen
- Course Folder of Fluid Mechanics: GeneralDokument7 SeitenCourse Folder of Fluid Mechanics: GeneralShreyas GuptaNoch keine Bewertungen
- How To Read A Codon TableDokument9 SeitenHow To Read A Codon TableShreyas GuptaNoch keine Bewertungen
- Philosophy Q1, 2,3Dokument6 SeitenPhilosophy Q1, 2,3Shreyas GuptaNoch keine Bewertungen
- Sno. Subject Code Subject Name: Only When Instructed To Do So by The DeanDokument1 SeiteSno. Subject Code Subject Name: Only When Instructed To Do So by The DeanShreyas GuptaNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- School of Mechanical Engineering, Kiit University Assignment 2Dokument3 SeitenSchool of Mechanical Engineering, Kiit University Assignment 2mantra2010Noch keine Bewertungen
- Virtual Displacement and Virtual Work: R K K MCL731: Analytical DynamicsDokument23 SeitenVirtual Displacement and Virtual Work: R K K MCL731: Analytical DynamicsNilesh PatilNoch keine Bewertungen
- Me 8692-Finite Element Analysis University Questions - Part A S.No Univ QN Apr - May 16Dokument17 SeitenMe 8692-Finite Element Analysis University Questions - Part A S.No Univ QN Apr - May 16Saravana Kumar MNoch keine Bewertungen
- Engineering Mechanics QUESTION PAPERSDokument31 SeitenEngineering Mechanics QUESTION PAPERSgotu123Noch keine Bewertungen
- Principle of Virtual Work and D'Alembert's PrincipleDokument10 SeitenPrinciple of Virtual Work and D'Alembert's PrincipleKristine Rodriguez-CarnicerNoch keine Bewertungen
- Elementary Theory of StructuresDokument112 SeitenElementary Theory of StructuresGodwin AcquahNoch keine Bewertungen
- Lectures On Classical Mechanics. John C. Baez PDFDokument76 SeitenLectures On Classical Mechanics. John C. Baez PDFMenelao ZubiriNoch keine Bewertungen
- Jacobian RedDokument42 SeitenJacobian RedTan Nguyen VanNoch keine Bewertungen
- Principle of Virtual WorkDokument4 SeitenPrinciple of Virtual Workaman maharNoch keine Bewertungen
- Virtual Work MethodDokument31 SeitenVirtual Work MethodRonnel Quinia100% (1)
- National Institute of Technology-MizoramDokument6 SeitenNational Institute of Technology-MizoramLITTLE RIDERSNoch keine Bewertungen
- July 28 - Introduction To Structural Dynamics Dr. HW Huang PDFDokument52 SeitenJuly 28 - Introduction To Structural Dynamics Dr. HW Huang PDFurvishNoch keine Bewertungen
- Structural AnalysisDokument95 SeitenStructural AnalysisTam Alasadi100% (4)
- ME302 - Theory of Machines Ii Spring 2020-2021 Homework #2Dokument2 SeitenME302 - Theory of Machines Ii Spring 2020-2021 Homework #2Ege GökayNoch keine Bewertungen
- FEM Project Report Group13Dokument16 SeitenFEM Project Report Group13nimishk92Noch keine Bewertungen
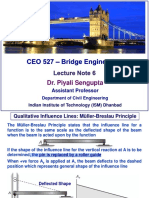
- CEO527 Bridge Engineering L6Dokument19 SeitenCEO527 Bridge Engineering L6rishav baishyaNoch keine Bewertungen
- Finite Element Concepts A Closed-Form Algebraic Development - Gautam Dasgupta (Springer) PDFDokument409 SeitenFinite Element Concepts A Closed-Form Algebraic Development - Gautam Dasgupta (Springer) PDFsebas zamata100% (3)
- 2.1 Displacement (External Load)Dokument40 Seiten2.1 Displacement (External Load)Adron Lim33% (3)
- Etd 137Dokument254 SeitenEtd 137Aneez KoyattyNoch keine Bewertungen
- 9-4 Method of Virtual Work: Trusses 9-4 Method of Virtual Work: TrussesDokument9 Seiten9-4 Method of Virtual Work: Trusses 9-4 Method of Virtual Work: TrussesSheane GutomanNoch keine Bewertungen
- FEM-2 Marks and 16 Marks Ans PDFDokument34 SeitenFEM-2 Marks and 16 Marks Ans PDFKarthik SubramaniNoch keine Bewertungen
- Video Lecture Series - Engineering CoursesDokument15 SeitenVideo Lecture Series - Engineering CoursesIrus RajanNoch keine Bewertungen
- Modeling and Simulation PDFDokument657 SeitenModeling and Simulation PDFWanki E Phawa SungohNoch keine Bewertungen
- m2l6 PDFDokument6 Seitenm2l6 PDFsrinadh1602Noch keine Bewertungen
- Energy Method PDFDokument43 SeitenEnergy Method PDFSenthil KumarNoch keine Bewertungen
- MEE1002 Engineering-Mechanics TH 1 AC37Dokument2 SeitenMEE1002 Engineering-Mechanics TH 1 AC37DiVik BhargAvaNoch keine Bewertungen
- CH 101 Chemistry (3-1-0-8)Dokument25 SeitenCH 101 Chemistry (3-1-0-8)akshayNoch keine Bewertungen
- Vehicle Dynamics Baruh Chapter 1Dokument40 SeitenVehicle Dynamics Baruh Chapter 1Ashley MoreiraNoch keine Bewertungen
- Design and Analysis Examples For Slab by Yield Line MethodDokument14 SeitenDesign and Analysis Examples For Slab by Yield Line MethodWendimu TolessaNoch keine Bewertungen
- Classical MechanicsDokument96 SeitenClassical MechanicsAnna EverzwijnNoch keine Bewertungen