Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Amount of Casien in Diff Samples of Milk (U)Dokument15 SeitenAmount of Casien in Diff Samples of Milk (U)VijayNoch keine Bewertungen
- Gas Dynamics and Jet Propulsion 2marksDokument15 SeitenGas Dynamics and Jet Propulsion 2marksAbdul rahumanNoch keine Bewertungen
- Unsuccessful MT-SM DeliveryDokument2 SeitenUnsuccessful MT-SM DeliveryPitam MaitiNoch keine Bewertungen
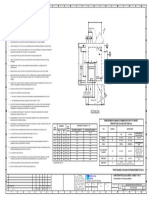
- Notes:: Reinforcement in Manhole Chamber With Depth To Obvert Greater Than 3.5M and Less Than 6.0MDokument1 SeiteNotes:: Reinforcement in Manhole Chamber With Depth To Obvert Greater Than 3.5M and Less Than 6.0Mسجى وليدNoch keine Bewertungen
- 01 托福基础课程Dokument57 Seiten01 托福基础课程ZhaoNoch keine Bewertungen
- Sample - SOFTWARE REQUIREMENT SPECIFICATIONDokument20 SeitenSample - SOFTWARE REQUIREMENT SPECIFICATIONMandula AbeyrathnaNoch keine Bewertungen
- Aleutia Solar Container ClassroomDokument67 SeitenAleutia Solar Container ClassroomaleutiaNoch keine Bewertungen
- Guyana and The Islamic WorldDokument21 SeitenGuyana and The Islamic WorldshuaibahmadkhanNoch keine Bewertungen
- LP For EarthquakeDokument6 SeitenLP For Earthquakejelena jorgeoNoch keine Bewertungen
- Presentation About GyroscopesDokument24 SeitenPresentation About GyroscopesgeenjunkmailNoch keine Bewertungen
- Cisco BGP ASPATH FilterDokument115 SeitenCisco BGP ASPATH FilterHalison SantosNoch keine Bewertungen
- Fire Protection in BuildingsDokument2 SeitenFire Protection in BuildingsJames Carl AriesNoch keine Bewertungen
- SSP 237 d1Dokument32 SeitenSSP 237 d1leullNoch keine Bewertungen
- National Anthems of Selected Countries: Country: United States of America Country: CanadaDokument6 SeitenNational Anthems of Selected Countries: Country: United States of America Country: CanadaHappyNoch keine Bewertungen
- Quiz 140322224412 Phpapp02Dokument26 SeitenQuiz 140322224412 Phpapp02Muhammad Mubeen Iqbal PuriNoch keine Bewertungen
- Friction: Ultiple Hoice UestionsDokument5 SeitenFriction: Ultiple Hoice Uestionspk2varmaNoch keine Bewertungen
- Anemia in PregnancyDokument5 SeitenAnemia in PregnancycfgrtwifhNoch keine Bewertungen
- CL57T V4.0Dokument14 SeitenCL57T V4.0dimitriNoch keine Bewertungen
- PC Model Answer Paper Winter 2016Dokument27 SeitenPC Model Answer Paper Winter 2016Deepak VermaNoch keine Bewertungen
- ASHRAE Journal - Absorption RefrigerationDokument11 SeitenASHRAE Journal - Absorption Refrigerationhonisme0% (1)
- Dermatology Skin in Systemic DiseaseDokument47 SeitenDermatology Skin in Systemic DiseaseNariska CooperNoch keine Bewertungen
- (Jones) GoodwinDokument164 Seiten(Jones) Goodwinmount2011Noch keine Bewertungen
- Algoritm BackTracking EnglezaDokument6 SeitenAlgoritm BackTracking Englezaionutz_67Noch keine Bewertungen
- Disassembly Procedures: 1 DELL U2422HB - U2422HXBDokument6 SeitenDisassembly Procedures: 1 DELL U2422HB - U2422HXBIonela CristinaNoch keine Bewertungen
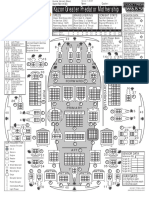
- Kazon Greater Predator MothershipDokument1 SeiteKazon Greater Predator MothershipknavealphaNoch keine Bewertungen
- 2022 Mable Parker Mclean Scholarship ApplicationDokument2 Seiten2022 Mable Parker Mclean Scholarship Applicationapi-444959661Noch keine Bewertungen
- Teaching Profession - Educational PhilosophyDokument23 SeitenTeaching Profession - Educational PhilosophyRon louise PereyraNoch keine Bewertungen
- CV Augusto Brasil Ocampo MedinaDokument4 SeitenCV Augusto Brasil Ocampo MedinaAugusto Brasil Ocampo MedinaNoch keine Bewertungen
- Summary of Bill of Quantities ChurchDokument52 SeitenSummary of Bill of Quantities ChurchBiniamNoch keine Bewertungen
- Week 4 - Theoretical Framework - LectureDokument13 SeitenWeek 4 - Theoretical Framework - LectureRayan Al-ShibliNoch keine Bewertungen