Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- FN 98 Mauser Model 98 Rifle Operators ManualDokument28 SeitenFN 98 Mauser Model 98 Rifle Operators ManualAdam Ward100% (1)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Radiation Safety Officers Handbook A PDFDokument100 SeitenRadiation Safety Officers Handbook A PDFAlejandro Zubiate100% (1)
- Khmer Rouge Division 703Dokument216 SeitenKhmer Rouge Division 703VienNgocQuang100% (1)
- Jason Capital Screw Jobs PDFDokument50 SeitenJason Capital Screw Jobs PDFДжек П100% (3)
- Shs Core Subjects MelcsDokument63 SeitenShs Core Subjects MelcsRoldan Merjudio100% (1)
- GA 33 KV VCB HT Panel - Siddharth Nagar Project. UPDokument17 SeitenGA 33 KV VCB HT Panel - Siddharth Nagar Project. UPaayushNoch keine Bewertungen
- The Silenced de Lisle Commando CarbineDokument6 SeitenThe Silenced de Lisle Commando CarbineVienNgocQuang100% (1)
- Cam Total WarDokument142 SeitenCam Total WarVienNgocQuangNoch keine Bewertungen
- T-34 in Angola 1970s 1980s - WwiiafterwwiiDokument24 SeitenT-34 in Angola 1970s 1980s - WwiiafterwwiiVienNgocQuang100% (1)
- Lee-Enfield Rifle RF Short MksI and II (II)Dokument4 SeitenLee-Enfield Rifle RF Short MksI and II (II)VienNgocQuangNoch keine Bewertungen
- GTC Express Itseez Opencv Webinar PDFDokument35 SeitenGTC Express Itseez Opencv Webinar PDFazazel17Noch keine Bewertungen
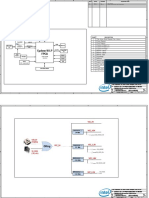
- c10lp Eval A1 SCHDokument17 Seitenc10lp Eval A1 SCHVienNgocQuangNoch keine Bewertungen
- Sc11 Cuda C BasicsDokument68 SeitenSc11 Cuda C BasicsPoncho CoetoNoch keine Bewertungen
- OpenCV Introduction: Getting Started with Image ProcessingDokument29 SeitenOpenCV Introduction: Getting Started with Image ProcessingVienNgocQuang100% (1)
- Workshop Manual (Eng-Rus)Dokument40 SeitenWorkshop Manual (Eng-Rus)VienNgocQuangNoch keine Bewertungen
- c10lp Eval A1 SCHDokument56 Seitenc10lp Eval A1 SCHVienNgocQuangNoch keine Bewertungen
- c10lp Eval A1 SCHDokument17 Seitenc10lp Eval A1 SCHVienNgocQuangNoch keine Bewertungen
- E911 Provisioning System Software Test PlanDokument11 SeitenE911 Provisioning System Software Test PlanVienNgocQuangNoch keine Bewertungen
- Industrial Sensors (Electromagnetic Flowmeter, Density (Consistency) Meter, Pressure Transmitter and Water Treatment Analyzer)Dokument1 SeiteIndustrial Sensors (Electromagnetic Flowmeter, Density (Consistency) Meter, Pressure Transmitter and Water Treatment Analyzer)VienNgocQuangNoch keine Bewertungen
- ch2 PDFDokument6 Seitench2 PDFVienNgocQuangNoch keine Bewertungen
- Role Profile Teaching Assistant HCMCDokument4 SeitenRole Profile Teaching Assistant HCMCVienNgocQuangNoch keine Bewertungen
- C For MathematiciansDokument41 SeitenC For MathematicianschinssuNoch keine Bewertungen
- DllmeDokument1 SeiteDllmeVienNgocQuangNoch keine Bewertungen
- Lee-Enfield Rifle 22RF Pattern 14Dokument5 SeitenLee-Enfield Rifle 22RF Pattern 14VienNgocQuangNoch keine Bewertungen
- Angle Iload Uload IsDokument10 SeitenAngle Iload Uload IsVienNgocQuangNoch keine Bewertungen
- MP 1Dokument4 SeitenMP 1VienNgocQuangNoch keine Bewertungen
- MP 2Dokument3 SeitenMP 2VienNgocQuangNoch keine Bewertungen
- Summary and Future WorkDokument2 SeitenSummary and Future WorkVienNgocQuangNoch keine Bewertungen
- People Republic of KampucheaDokument129 SeitenPeople Republic of KampucheaVienNgocQuangNoch keine Bewertungen
- MP 3Dokument3 SeitenMP 3VienNgocQuangNoch keine Bewertungen
- JM 154Dokument226 SeitenJM 154VienNgocQuangNoch keine Bewertungen
- Facial Feature Extraction and Pose DeterminationDokument20 SeitenFacial Feature Extraction and Pose DeterminationVienNgocQuangNoch keine Bewertungen
- SummaryDokument1 SeiteSummaryVienNgocQuangNoch keine Bewertungen
- TOSHIBA Global Internship 2018 - Application Guidelines & Position ListDokument17 SeitenTOSHIBA Global Internship 2018 - Application Guidelines & Position ListVienNgocQuangNoch keine Bewertungen
- 4MA1 1H Que 20210304Dokument28 Seiten4MA1 1H Que 20210304mo gaNoch keine Bewertungen
- Web 2.0, Web 3.0, and User Participation in The WebDokument13 SeitenWeb 2.0, Web 3.0, and User Participation in The WebDina Navarro DiestroNoch keine Bewertungen
- Closed Coke Slurry System: An Advanced Coke Handling ProcessDokument33 SeitenClosed Coke Slurry System: An Advanced Coke Handling ProcessFayaz MohammedNoch keine Bewertungen
- SCHEMACSC520Dokument3 SeitenSCHEMACSC520fazaseikoNoch keine Bewertungen
- Latex WikibookDokument313 SeitenLatex Wikibookraul_apNoch keine Bewertungen
- Hydraulic Accumulator - Test and Charge: Cerrar SIS Pantalla AnteriorDokument9 SeitenHydraulic Accumulator - Test and Charge: Cerrar SIS Pantalla AnteriorHomer Yoel Nieto Mendoza100% (1)
- Thrust Equation For A Turbofan Double Inlet/Outlet: Joshtheengineer April 8, 2017Dokument7 SeitenThrust Equation For A Turbofan Double Inlet/Outlet: Joshtheengineer April 8, 2017Muhammad RidwanNoch keine Bewertungen
- DLT - Ate 2022Dokument28 SeitenDLT - Ate 2022chellep.uniNoch keine Bewertungen
- Fuzzy Logic Tutorial: What Is, Application & ExampleDokument7 SeitenFuzzy Logic Tutorial: What Is, Application & ExampleDe' LufiasNoch keine Bewertungen
- Mansarovar Energy-Campo JazminDokument169 SeitenMansarovar Energy-Campo JazminFRANCISCO BADILLONoch keine Bewertungen
- Module 4 NotesDokument20 SeitenModule 4 NotesvijaykumaryadavNoch keine Bewertungen
- Speech Language Impairment - Eduu 511Dokument15 SeitenSpeech Language Impairment - Eduu 511api-549169454Noch keine Bewertungen
- Updated Official All Campuses ON CAMPUS Final Exams Schedule Spring 2021-22 Plan BDokument11 SeitenUpdated Official All Campuses ON CAMPUS Final Exams Schedule Spring 2021-22 Plan BMohammad SafadiehNoch keine Bewertungen
- Chili Processing L2 (Cur)Dokument94 SeitenChili Processing L2 (Cur)thomas1313Noch keine Bewertungen
- Guide To Preparing Tax Research MemosDokument2 SeitenGuide To Preparing Tax Research MemoscglaskoNoch keine Bewertungen
- ED 107 162 Author Morphology. Pub Date Aug 69 Note Austin Edrs Price MF-$O.76 DescriptorsDokument75 SeitenED 107 162 Author Morphology. Pub Date Aug 69 Note Austin Edrs Price MF-$O.76 DescriptorsTalha KhanNoch keine Bewertungen
- Exercise 7 - The Avian EggDokument5 SeitenExercise 7 - The Avian EggSebastian SmytheNoch keine Bewertungen
- Adolescent InterviewDokument9 SeitenAdolescent Interviewapi-532448305Noch keine Bewertungen
- Viking Tech ARG03FTC2551 - C217943Dokument8 SeitenViking Tech ARG03FTC2551 - C217943ALIRIO SOLANONoch keine Bewertungen
- What Is A BibliographyDokument7 SeitenWhat Is A BibliographyKaye Diamante ValleserNoch keine Bewertungen
- FRS - Brake System - TrainsetDokument12 SeitenFRS - Brake System - TrainsetCad TutorNoch keine Bewertungen
- Basic Engineering & Site DataDokument13 SeitenBasic Engineering & Site DataBalasubramanianNoch keine Bewertungen
- Formative vs Reflective Measures of Organizational CoordinationDokument20 SeitenFormative vs Reflective Measures of Organizational Coordinationmasterling880% (1)
- Upto 62rd BPSC Mechanical Question BankDokument140 SeitenUpto 62rd BPSC Mechanical Question BankASHISH KUMAR SINGHNoch keine Bewertungen
- Midterm Exam: Cecor2 - Hydraulics and Geotechnical EngineeringDokument2 SeitenMidterm Exam: Cecor2 - Hydraulics and Geotechnical EngineeringEjay EmpleoNoch keine Bewertungen
- From Self Disorders To The Schizophrenic Self: Riccardo Piero Dalle LucheDokument31 SeitenFrom Self Disorders To The Schizophrenic Self: Riccardo Piero Dalle LucheMichel de NostredameNoch keine Bewertungen