Das könnte Ihnen auch gefallen
- Chapter 1 Kinematics of A ParticleDokument52 SeitenChapter 1 Kinematics of A ParticledudescapeNoch keine Bewertungen
- Lecture 2 Particle Kinematics OKDokument27 SeitenLecture 2 Particle Kinematics OKTất ThànhNoch keine Bewertungen
- Kinematics 1rDokument75 SeitenKinematics 1rTarun MankadNoch keine Bewertungen
- Kinematics in One DimensionDokument16 SeitenKinematics in One DimensionApex InstituteNoch keine Bewertungen
- Kinema TicsDokument43 SeitenKinema Ticsstallone21Noch keine Bewertungen
- Kinematics: Classical Mechanics MotionDokument11 SeitenKinematics: Classical Mechanics MotionVipeen BendaleNoch keine Bewertungen
- Tutorial 1+Dokument36 SeitenTutorial 1+NehaNoch keine Bewertungen
- Basics of Kinematics - Boundless PhysicsDokument68 SeitenBasics of Kinematics - Boundless PhysicsAvirup RayNoch keine Bewertungen
- For Audience From Foreign StudentsDokument202 SeitenFor Audience From Foreign StudentsNickNoch keine Bewertungen
- Dynamic LecturesDokument29 SeitenDynamic Lectureseid ibrahimNoch keine Bewertungen
- DisplacementDokument3 SeitenDisplacementAlfredo RomeroNoch keine Bewertungen
- An Moplil GasdewsDokument22 SeitenAn Moplil GasdewsSanthosh PNoch keine Bewertungen
- Rotational Motion 69Dokument13 SeitenRotational Motion 69okumuenock000Noch keine Bewertungen
- (Donald T. Greenwood) Principles of Dynamics Chap2Dokument47 Seiten(Donald T. Greenwood) Principles of Dynamics Chap2GracielaNoch keine Bewertungen
- Dynamics Module 3-2Dokument3 SeitenDynamics Module 3-2Jed IsidtoNoch keine Bewertungen
- Angular MomentumDokument12 SeitenAngular Momentumblowmeasshole1911Noch keine Bewertungen
- Chapter 4 - 9.10.2021Dokument47 SeitenChapter 4 - 9.10.2021وليد الجندي Walid JundiNoch keine Bewertungen
- COLLEGE PHYSICS - Rectilinear MotionDokument7 SeitenCOLLEGE PHYSICS - Rectilinear MotionAllen TorogonNoch keine Bewertungen
- Chapter 04. Motion in Two DimensionsDokument55 SeitenChapter 04. Motion in Two DimensionsĐức HuyNoch keine Bewertungen
- KinematicsDokument28 SeitenKinematicsM J RhoadesNoch keine Bewertungen
- Angular Momentum - Wikipedia PDFDokument15 SeitenAngular Momentum - Wikipedia PDFPuneet PriyangueNoch keine Bewertungen
- Chapter 1: Introduction: Mechanic Static DynamicDokument8 SeitenChapter 1: Introduction: Mechanic Static DynamicAlia RizalNoch keine Bewertungen
- Physics 1 4 WeekDokument83 SeitenPhysics 1 4 Weekibrahim.demirNoch keine Bewertungen
- Module 1 Dynamics of Rigid BodiesDokument11 SeitenModule 1 Dynamics of Rigid BodiesBilly Joel DasmariñasNoch keine Bewertungen
- Physics Assignment 4th SemesterDokument11 SeitenPhysics Assignment 4th SemesterMuzaffar SalikNoch keine Bewertungen
- Rotating Frames: 4.1 Angular VelocityDokument14 SeitenRotating Frames: 4.1 Angular VelocitymaxNoch keine Bewertungen
- KuizDokument4 SeitenKuizFarize HashimNoch keine Bewertungen
- Kinematics of A Particle PDFDokument47 SeitenKinematics of A Particle PDFUjjawal kumarNoch keine Bewertungen
- Ch-02 Kinematics of PairDokument16 SeitenCh-02 Kinematics of Pairsamuel mechNoch keine Bewertungen
- Kinematics: Describe The Dynamics:study The Statitcs: Objects inDokument6 SeitenKinematics: Describe The Dynamics:study The Statitcs: Objects innoNoch keine Bewertungen
- Curvilinear MotionDokument5 SeitenCurvilinear MotionRichardsssdNoch keine Bewertungen
- Chapter 3 Contd: Motion in Two DimensionsDokument56 SeitenChapter 3 Contd: Motion in Two DimensionsAchiri TangeNoch keine Bewertungen
- Topic 5 Basic Concepts in DynamicsDokument8 SeitenTopic 5 Basic Concepts in DynamicsnatashaaminahjafriNoch keine Bewertungen
- Motion in Line and Plane Revision NotesDokument28 SeitenMotion in Line and Plane Revision NotesBighnesh worldNoch keine Bewertungen
- 01 Kinematics Revision Notes Quizrr PDFDokument70 Seiten01 Kinematics Revision Notes Quizrr PDFHimanshu YadavNoch keine Bewertungen
- Angular MomentumDokument10 SeitenAngular MomentumKlarence Medel PacerNoch keine Bewertungen
- Engineering Mechanics Part II DynamicsDokument116 SeitenEngineering Mechanics Part II Dynamicskabwefelix959Noch keine Bewertungen
- Chapter 4 Motion in Two DimensionDokument45 SeitenChapter 4 Motion in Two DimensionKAUSHAL KEVINNoch keine Bewertungen
- Kinematics of Particles: Study Guide For Module No. 2Dokument8 SeitenKinematics of Particles: Study Guide For Module No. 2Jovin BallesterosNoch keine Bewertungen
- DRB TermsDokument3 SeitenDRB Termsvia.butalNoch keine Bewertungen
- Motion in Two DimensionsDokument48 SeitenMotion in Two DimensionsJoe HughesNoch keine Bewertungen
- Iare em Lecture Notes 2 PDFDokument188 SeitenIare em Lecture Notes 2 PDFvanajaNoch keine Bewertungen
- Kinematics of A ParticleDokument47 SeitenKinematics of A ParticleDarsh AgrawalNoch keine Bewertungen
- Physgen Cu2Dokument27 SeitenPhysgen Cu2emji miraNoch keine Bewertungen
- Motion in A Plane Class 11 Notes Physics Chapter 4 - Learn CBSEDokument14 SeitenMotion in A Plane Class 11 Notes Physics Chapter 4 - Learn CBSEbibinNoch keine Bewertungen
- MotionDokument6 SeitenMotiontufygiuohiNoch keine Bewertungen
- Motion in A Plane Class 11 Notes PhysicsDokument12 SeitenMotion in A Plane Class 11 Notes Physicssrija vijjapuNoch keine Bewertungen
- Phy 312cm Notes 2006Dokument60 SeitenPhy 312cm Notes 2006ericNoch keine Bewertungen
- Dynamics of System of ParticlesDokument16 SeitenDynamics of System of ParticlesHarishNoch keine Bewertungen
- Steven L. Rickman: Presented byDokument201 SeitenSteven L. Rickman: Presented bymariela baigorriaNoch keine Bewertungen
- 12.1 Vector-Valued FunctionDokument14 Seiten12.1 Vector-Valued FunctionCrystalNoch keine Bewertungen
- Quantum Mechanics Angular MomentumDokument13 SeitenQuantum Mechanics Angular MomentumTo Get HerNoch keine Bewertungen
- Week 6Dokument67 SeitenWeek 6anthony.sisonNoch keine Bewertungen
- E103 - AgustinDokument20 SeitenE103 - AgustinSeth Jarl G. AgustinNoch keine Bewertungen
- Kinematics MachineDokument2 SeitenKinematics Machineaerochandru.87Noch keine Bewertungen
- Motion in Two DimensionsDokument37 SeitenMotion in Two DimensionsTABIBI11Noch keine Bewertungen
- Acceleration: Acceleration, in Physics, Is The Rate ofDokument31 SeitenAcceleration: Acceleration, in Physics, Is The Rate ofstallone21Noch keine Bewertungen
- Curves From Motion, Motion From Curves: AbstractDokument28 SeitenCurves From Motion, Motion From Curves: AbstractPamela Palomera-AriasNoch keine Bewertungen
- Electron Acceptor - WikipediaDokument2 SeitenElectron Acceptor - Wikipediakirthi83Noch keine Bewertungen
- Stainless Steel - WikipediaDokument14 SeitenStainless Steel - Wikipediakirthi83Noch keine Bewertungen
- Salinity - WikipediaDokument6 SeitenSalinity - Wikipediakirthi83Noch keine Bewertungen
- Electron Donor - WikipediaDokument2 SeitenElectron Donor - Wikipediakirthi83Noch keine Bewertungen
- Electrofuel - WikipediaDokument2 SeitenElectrofuel - Wikipediakirthi83Noch keine Bewertungen
- Renewable Fuels - WikipediaDokument4 SeitenRenewable Fuels - Wikipediakirthi83Noch keine Bewertungen
- Microbial Electrosynthesis - WikipediaDokument2 SeitenMicrobial Electrosynthesis - Wikipediakirthi83Noch keine Bewertungen
- Statistical Dispersion - WikipediaDokument3 SeitenStatistical Dispersion - Wikipediakirthi83Noch keine Bewertungen
- Tolerance Analysis - WikipediaDokument4 SeitenTolerance Analysis - Wikipediakirthi83Noch keine Bewertungen
- Antikythera Mechanism - WikipediaDokument23 SeitenAntikythera Mechanism - Wikipediakirthi83Noch keine Bewertungen
- Powertrain - WikipediaDokument3 SeitenPowertrain - Wikipediakirthi83Noch keine Bewertungen
- Differential (Mechanical Device) - WikipediaDokument9 SeitenDifferential (Mechanical Device) - Wikipediakirthi83100% (1)
- Renewable Fuels - WikipediaDokument4 SeitenRenewable Fuels - Wikipediakirthi83Noch keine Bewertungen
- Statistical Dispersion - WikipediaDokument3 SeitenStatistical Dispersion - Wikipediakirthi83Noch keine Bewertungen
- Interquartile Range - WikipediaDokument5 SeitenInterquartile Range - Wikipediakirthi83Noch keine Bewertungen
- Tolerance Analysis - WikipediaDokument4 SeitenTolerance Analysis - Wikipediakirthi83Noch keine Bewertungen
- Process Capability - WikipediaDokument2 SeitenProcess Capability - Wikipediakirthi83Noch keine Bewertungen
- Lean Six Sigma - WikipediaDokument4 SeitenLean Six Sigma - Wikipediakirthi83Noch keine Bewertungen
- Geometric Dimensioning and Tolerancing - WikipediaDokument5 SeitenGeometric Dimensioning and Tolerancing - Wikipediakirthi83Noch keine Bewertungen
- Geomembrane - WikipediaDokument6 SeitenGeomembrane - Wikipediakirthi83Noch keine Bewertungen
- Machine Design - WikipediaDokument3 SeitenMachine Design - Wikipediakirthi83Noch keine Bewertungen
- Tolerance Analysis - WikipediaDokument4 SeitenTolerance Analysis - Wikipediakirthi83Noch keine Bewertungen
- Styrofoam - WikipediaDokument4 SeitenStyrofoam - Wikipediakirthi83Noch keine Bewertungen
- German Institute of Science and Technology (Singapore) - WikipediaDokument2 SeitenGerman Institute of Science and Technology (Singapore) - Wikipediakirthi83Noch keine Bewertungen
- Aromatic Hydrocarbon - WikipediaDokument6 SeitenAromatic Hydrocarbon - Wikipediakirthi83Noch keine Bewertungen
- Thermoplastic - WikipediaDokument5 SeitenThermoplastic - Wikipediakirthi83Noch keine Bewertungen
- High-Density Polyethylene - WikipediaDokument3 SeitenHigh-Density Polyethylene - Wikipediakirthi83Noch keine Bewertungen
- Open-Chain Compound - WikipediaDokument2 SeitenOpen-Chain Compound - Wikipediakirthi83Noch keine Bewertungen
- Aliphatic Compound - WikipediaDokument3 SeitenAliphatic Compound - Wikipediakirthi83Noch keine Bewertungen
- Front-End Engineering - WikipediaDokument3 SeitenFront-End Engineering - Wikipediakirthi83100% (1)
- Ashok B Lall - 1991 - Climate and Housing Form-A Case Study of New Delhi PDFDokument13 SeitenAshok B Lall - 1991 - Climate and Housing Form-A Case Study of New Delhi PDFAkanksha SinghNoch keine Bewertungen
- Diagnosing Borderline Personality DisorderDokument12 SeitenDiagnosing Borderline Personality DisorderAnonymous 0uCHZz72vwNoch keine Bewertungen
- The SophistsDokument16 SeitenThe SophistsWella Wella Wella100% (1)
- CON4990 - Candido Da Silva-JavaOne 2014 - Securing RESTful Resources With OAuth2Dokument38 SeitenCON4990 - Candido Da Silva-JavaOne 2014 - Securing RESTful Resources With OAuth2Edwin Santiago CabrejosNoch keine Bewertungen
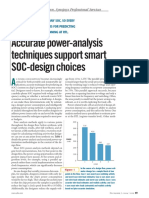
- Accurate Power-Analysis Techniques Support Smart SOC-design ChoicesDokument4 SeitenAccurate Power-Analysis Techniques Support Smart SOC-design ChoicesSaurabh KumarNoch keine Bewertungen
- 1735 - Alexander Pope - Works Vol IDokument244 Seiten1735 - Alexander Pope - Works Vol IMennatallah M.Salah El DinNoch keine Bewertungen
- Best Practice in Essbase Business Rule Writing-ManuskriptDokument5 SeitenBest Practice in Essbase Business Rule Writing-Manuskriptsen2natNoch keine Bewertungen
- Introduction Programming App InventorDokument37 SeitenIntroduction Programming App Inventorfernando verduNoch keine Bewertungen
- Course Concessions and Public Private Partnerships (PPP) in Water SectorDokument3 SeitenCourse Concessions and Public Private Partnerships (PPP) in Water SectorMihai MihailescuNoch keine Bewertungen
- HP S3100V2 MIB CompanionDokument401 SeitenHP S3100V2 MIB CompanionWagner VictoriaNoch keine Bewertungen
- Dmitri Sorokin - Introduction To The Classical Theory of Higher SpinsDokument33 SeitenDmitri Sorokin - Introduction To The Classical Theory of Higher SpinsKlim00Noch keine Bewertungen
- Mva - 2008 India School Rick LoydDokument86 SeitenMva - 2008 India School Rick Loydamar_saxena60857Noch keine Bewertungen
- Reader PositioningDokument13 SeitenReader Positioningapi-295282232100% (3)
- 9990 Y18-20 Sy PDFDokument40 Seiten9990 Y18-20 Sy PDFmashalNoch keine Bewertungen
- Circuit AnalysisDokument20 SeitenCircuit AnalysisShadoo TarimoNoch keine Bewertungen
- 50 Affirmations For A Fertile Mind, Heart & SoulDokument104 Seiten50 Affirmations For A Fertile Mind, Heart & SoulKarishma SethNoch keine Bewertungen
- UT Dallas Syllabus For cs4349.001 05f Taught by Ovidiu Daescu (Daescu)Dokument4 SeitenUT Dallas Syllabus For cs4349.001 05f Taught by Ovidiu Daescu (Daescu)UT Dallas Provost's Technology GroupNoch keine Bewertungen
- Student Management System Project in C++Dokument3 SeitenStudent Management System Project in C++rainu sikarwarNoch keine Bewertungen
- Wiegers Getting The Most Out of Requirements Management ToolDokument9 SeitenWiegers Getting The Most Out of Requirements Management ToolAmreshNoch keine Bewertungen
- An Understanding of Psychometric ToolsDokument4 SeitenAn Understanding of Psychometric ToolsAntariksh Bhandari100% (1)
- Assignment No. 2 MTH 432A: Introduction To Sampling Theory 2021Dokument1 SeiteAssignment No. 2 MTH 432A: Introduction To Sampling Theory 2021Krishna Pratap MallNoch keine Bewertungen
- The Geiger: FeaturesDokument3 SeitenThe Geiger: FeaturesGharib MahmoudNoch keine Bewertungen
- Lesson Plan Civic Form 3Dokument1 SeiteLesson Plan Civic Form 3Nurul Liyana Abdullah100% (2)
- Code Book For MA/M.Sc. Examinations, 2011Dokument4 SeitenCode Book For MA/M.Sc. Examinations, 2011Aditi GoyalNoch keine Bewertungen
- 1) 64 Bit Ripple Carry Adder Code With OutputDokument4 Seiten1) 64 Bit Ripple Carry Adder Code With OutputKALAIPRIYAN MNoch keine Bewertungen
- ManualVsk5 enDokument23 SeitenManualVsk5 ent0manNoch keine Bewertungen
- Nichols, Ashton. The Loves of Plants and Animals: Romantic Science and The Pleasures of NatureDokument15 SeitenNichols, Ashton. The Loves of Plants and Animals: Romantic Science and The Pleasures of NatureBarbara RossinNoch keine Bewertungen
- What Is Dark Energy?Dokument20 SeitenWhat Is Dark Energy?Harsh DhyaniNoch keine Bewertungen
- Use of Force by Seattle Police Department Officers 2006 - 2009Dokument10 SeitenUse of Force by Seattle Police Department Officers 2006 - 2009Chs BlogNoch keine Bewertungen
- Codigos International 2001Dokument6 SeitenCodigos International 2001Scan DieselNoch keine Bewertungen