Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- DK-26 Instruction Manual (Maintenance) PDFDokument191 SeitenDK-26 Instruction Manual (Maintenance) PDFFernando César Carbone86% (7)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- TAQA Approved Vendor List 30.05.2021Dokument328 SeitenTAQA Approved Vendor List 30.05.2021Bala KrishnaNoch keine Bewertungen
- Basic Computer Hardware MaintenanceDokument35 SeitenBasic Computer Hardware Maintenanceshanea bucknor89% (9)
- Question Paper - Fire Watch ManDokument3 SeitenQuestion Paper - Fire Watch MankhurramNoch keine Bewertungen
- Altec - Loudspeaker Enclosure - Their Design and Use (Circa 1975) PDFDokument31 SeitenAltec - Loudspeaker Enclosure - Their Design and Use (Circa 1975) PDFRaju100% (1)
- LUCY30503 Aegis Brochure March WebReadyDokument28 SeitenLUCY30503 Aegis Brochure March WebReadyKhalid AwanNoch keine Bewertungen
- Malaria PosterDokument1 SeiteMalaria PosterkhurramNoch keine Bewertungen
- PSM Sharing 1Dokument11 SeitenPSM Sharing 1khurram100% (1)
- Muslim CharacterDokument106 SeitenMuslim CharacterISLAMICULTURE100% (3)
- 567 Electrical SafetyDokument1 Seite567 Electrical SafetykhurramNoch keine Bewertungen
- Common DOG Bite DiseasesDokument3 SeitenCommon DOG Bite DiseaseskhurramNoch keine Bewertungen
- Arc Flash Safety PDFDokument76 SeitenArc Flash Safety PDFEdwin53Noch keine Bewertungen
- Mandatory Documents and Records Required by ISO 45001Dokument2 SeitenMandatory Documents and Records Required by ISO 45001khurram100% (1)
- Spiral Wound Gaskets Main TypesDokument2 SeitenSpiral Wound Gaskets Main TypeskhurramNoch keine Bewertungen
- For Working or Near WaterDokument7 SeitenFor Working or Near WaterkhurramNoch keine Bewertungen
- 英文版:《HSSE承诺书》Dokument1 Seite英文版:《HSSE承诺书》khurramNoch keine Bewertungen
- Snake Hazard AlertDokument3 SeitenSnake Hazard Alertkhurram0% (1)
- Daily Activity SheetDokument1 SeiteDaily Activity SheetkhurramNoch keine Bewertungen
- CF Eive@: Provision O F Epcc Servces Sufyan Epf Project-Block 6Dokument6 SeitenCF Eive@: Provision O F Epcc Servces Sufyan Epf Project-Block 6khurramNoch keine Bewertungen
- Sub: Falling Object Injury - Newspaper Report: What Happened?Dokument1 SeiteSub: Falling Object Injury - Newspaper Report: What Happened?khurramNoch keine Bewertungen
- CP 416Dokument4 SeitenCP 416khurramNoch keine Bewertungen
- CP 207Dokument5 SeitenCP 207khurramNoch keine Bewertungen
- Water ConsumptionDokument9 SeitenWater ConsumptionJackielyn VarquezNoch keine Bewertungen
- St0011 Out Psi-EpfDokument14 SeitenSt0011 Out Psi-EpfkhurramNoch keine Bewertungen
- Excel Guide - AdvancedDokument207 SeitenExcel Guide - AdvancedKaren AbarcaNoch keine Bewertungen
- CP 415Dokument5 SeitenCP 415khurramNoch keine Bewertungen
- POSCO E & C Action Plan During CCL Commissioning and Start Up PeriodDokument13 SeitenPOSCO E & C Action Plan During CCL Commissioning and Start Up PeriodkhurramNoch keine Bewertungen
- CP 110Dokument5 SeitenCP 110khurramNoch keine Bewertungen
- DPOC-1193-PR-PIP-006 Tie-In Method Statement For Flanged Face and Screwed Tie-In JointsDokument6 SeitenDPOC-1193-PR-PIP-006 Tie-In Method Statement For Flanged Face and Screwed Tie-In JointskhurramNoch keine Bewertungen
- General Risk Assessment Priority RatingDokument1 SeiteGeneral Risk Assessment Priority RatingkhurramNoch keine Bewertungen
- Excavation ProgramDokument14 SeitenExcavation ProgramkhurramNoch keine Bewertungen
- Risk Assessment and Control Form (Crane Operation)Dokument4 SeitenRisk Assessment and Control Form (Crane Operation)khurramNoch keine Bewertungen
- ExcavchkDokument4 SeitenExcavchkkhurramNoch keine Bewertungen
- Procd Working at Height ScaffoldingDokument3 SeitenProcd Working at Height ScaffoldingkhurramNoch keine Bewertungen
- Service 3121290Dokument396 SeitenService 3121290fercho_50Noch keine Bewertungen
- FMMT415 FMMT417 FMMT415 FMMT417: Typical CharacteristicsDokument2 SeitenFMMT415 FMMT417 FMMT415 FMMT417: Typical CharacteristicsFabian OrtuzarNoch keine Bewertungen
- Parts Reference ListDokument29 SeitenParts Reference ListVitor SousaNoch keine Bewertungen
- MF 7060275 DA PreviewDokument31 SeitenMF 7060275 DA PreviewTEAM LOUDIMANoch keine Bewertungen
- FD535 (Datasheet)Dokument3 SeitenFD535 (Datasheet)BlAdE 12Noch keine Bewertungen
- Powerpress ANDRITZDokument4 SeitenPowerpress ANDRITZCesar LapaNoch keine Bewertungen
- Kenmore FridgeDokument80 SeitenKenmore FridgelarryNoch keine Bewertungen
- Typesofmemory UpdatedDokument8 SeitenTypesofmemory UpdatedErmin SehicNoch keine Bewertungen
- Oxford Semiconductor PCIeDokument2 SeitenOxford Semiconductor PCIeisoam123Noch keine Bewertungen
- Datasheet Andrena 12V25Ah: Lightweight PowerDokument2 SeitenDatasheet Andrena 12V25Ah: Lightweight PowerMayur DeokarNoch keine Bewertungen
- Cooling Gas Compressor (CG 438 J) : Detail Bill of Material (Compressor)Dokument8 SeitenCooling Gas Compressor (CG 438 J) : Detail Bill of Material (Compressor)Haitham AbdEl-TawabNoch keine Bewertungen
- Alstom MAVS 01, 02, 03 - Check Synchronising Relay. Short Technical Description.Dokument12 SeitenAlstom MAVS 01, 02, 03 - Check Synchronising Relay. Short Technical Description.geoff collins100% (2)
- Fuse - On: Short Circuit Protection in PV SystemsDokument8 SeitenFuse - On: Short Circuit Protection in PV SystemsDiego MorenoNoch keine Bewertungen
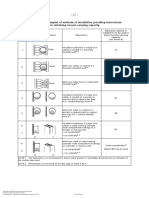
- Table A.52.3 - Examples of Methods of Installation Providing Instructions For Obtaining Current-Carrying CapacityDokument7 SeitenTable A.52.3 - Examples of Methods of Installation Providing Instructions For Obtaining Current-Carrying Capacityvasu1984Noch keine Bewertungen
- Muhammad Rafi: EducationDokument3 SeitenMuhammad Rafi: Educationabid445875Noch keine Bewertungen
- Easa Biweekly 20-2021Dokument2 SeitenEasa Biweekly 20-2021ChristianNoch keine Bewertungen
- Acer Travelmate 4150 Dunlin LA-2601 SchematicsDokument51 SeitenAcer Travelmate 4150 Dunlin LA-2601 SchematicsDoru Razvan100% (1)
- SIRIO - NEW Mighty Vector 4000 - ManualDokument8 SeitenSIRIO - NEW Mighty Vector 4000 - ManualLeonardus Suryo SuhartoNoch keine Bewertungen
- Mercruiser MCM 454 Mag MpiDokument1.027 SeitenMercruiser MCM 454 Mag Mpi薛泽绵Noch keine Bewertungen
- GTN 6Xx/7Xx Aml STC Installation Manual: 190-01007-A3 December 2012 Revision 4Dokument412 SeitenGTN 6Xx/7Xx Aml STC Installation Manual: 190-01007-A3 December 2012 Revision 4Carlos Javier Silvera100% (2)
- UPS and Power Qyality Products Australia and New Zealand CatalogueDokument72 SeitenUPS and Power Qyality Products Australia and New Zealand CataloguewillieferreiraNoch keine Bewertungen
- Royal Enfield 350 STD, 4 Speed Gear Box - ExploredDokument15 SeitenRoyal Enfield 350 STD, 4 Speed Gear Box - ExploredantonymariaNoch keine Bewertungen
- Drilling RisersDokument13 SeitenDrilling Risersadvantage025Noch keine Bewertungen
- Electrical SystemDokument368 SeitenElectrical SystemAnonymous 28jRu2jNoch keine Bewertungen