Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Lesson Plan Pumpkin Moon SandDokument3 SeitenLesson Plan Pumpkin Moon Sandapi-273177086Noch keine Bewertungen
- Equine PregnancyDokument36 SeitenEquine Pregnancydrdhirenvet100% (1)
- NCPDokument3 SeitenNCPchesca_paunganNoch keine Bewertungen
- Contents Serbo-Croatian GrammarDokument2 SeitenContents Serbo-Croatian GrammarLeo VasilaNoch keine Bewertungen
- Clearing Negative SpiritsDokument6 SeitenClearing Negative SpiritsmehorseblessedNoch keine Bewertungen
- Best-First SearchDokument2 SeitenBest-First Searchgabby209Noch keine Bewertungen
- United States Court of Appeals, Third CircuitDokument1 SeiteUnited States Court of Appeals, Third CircuitScribd Government DocsNoch keine Bewertungen
- Etta Calhoun v. InventHelp Et Al, Class Action Lawsuit Complaint, Eastern District of Pennsylvania (6/1/8)Dokument44 SeitenEtta Calhoun v. InventHelp Et Al, Class Action Lawsuit Complaint, Eastern District of Pennsylvania (6/1/8)Peter M. HeimlichNoch keine Bewertungen
- The Hawthorne Studies RevisitedDokument25 SeitenThe Hawthorne Studies Revisitedsuhana satijaNoch keine Bewertungen
- Thesis FulltextDokument281 SeitenThesis FulltextEvgenia MakantasiNoch keine Bewertungen
- Scatchell Jr. V Village of Melrose Park Et Al.Dokument48 SeitenScatchell Jr. V Village of Melrose Park Et Al.Gianna ScatchellNoch keine Bewertungen
- Jyotish - 2003 Sri Jagannath Center - Narayan Iyer - Divisional Charts - Divining Through DivisionsDokument36 SeitenJyotish - 2003 Sri Jagannath Center - Narayan Iyer - Divisional Charts - Divining Through DivisionsDeepa MishraNoch keine Bewertungen
- Lewin's Change ManagementDokument5 SeitenLewin's Change ManagementutsavNoch keine Bewertungen
- Liver Disease With PregnancyDokument115 SeitenLiver Disease With PregnancyAmro Ahmed Abdelrhman100% (3)
- Practice Test 4 For Grade 12Dokument5 SeitenPractice Test 4 For Grade 12MAx IMp BayuNoch keine Bewertungen
- RR 10-76Dokument4 SeitenRR 10-76cheska_abigail950Noch keine Bewertungen
- The Changeling by Thomas MiddletonDokument47 SeitenThe Changeling by Thomas MiddletonPaulinaOdeth RothNoch keine Bewertungen
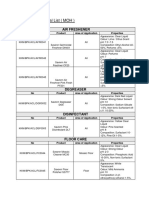
- Approved Chemical ListDokument2 SeitenApproved Chemical ListSyed Mansur Alyahya100% (1)
- The Berenstain Bears and Baby Makes FiveDokument33 SeitenThe Berenstain Bears and Baby Makes Fivezhuqiming87% (54)
- The New Definition and Classification of Seizures and EpilepsyDokument16 SeitenThe New Definition and Classification of Seizures and EpilepsynadiafyNoch keine Bewertungen
- MuzicaDokument3 SeitenMuzicaGiurcanas AndreiNoch keine Bewertungen
- Long 1988Dokument4 SeitenLong 1988Ovirus OviNoch keine Bewertungen
- Zero Power Factor Method or Potier MethodDokument1 SeiteZero Power Factor Method or Potier MethodMarkAlumbroTrangiaNoch keine Bewertungen
- Service and Maintenance Manual AFPX 513 PDFDokument146 SeitenService and Maintenance Manual AFPX 513 PDFManuel Amado Montoya AgudeloNoch keine Bewertungen
- Becoming FarmersDokument13 SeitenBecoming FarmersJimena RoblesNoch keine Bewertungen
- 1.quetta Master Plan RFP Draft1Dokument99 Seiten1.quetta Master Plan RFP Draft1Munir HussainNoch keine Bewertungen
- Sino-Japanese Haikai PDFDokument240 SeitenSino-Japanese Haikai PDFAlina Diana BratosinNoch keine Bewertungen
- Eternal LifeDokument9 SeitenEternal LifeEcheverry MartínNoch keine Bewertungen
- Algebra. Equations. Solving Quadratic Equations B PDFDokument1 SeiteAlgebra. Equations. Solving Quadratic Equations B PDFRoberto CastroNoch keine Bewertungen
- 38 Bayan Muna Vs MendozaDokument3 Seiten38 Bayan Muna Vs MendozaDavid Antonio A. EscuetaNoch keine Bewertungen