Das könnte Ihnen auch gefallen
- Electrical Machines: Lecture Notes for Electrical Machines CourseVon EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNoch keine Bewertungen
- PWM CTRLDokument3 SeitenPWM CTRLNeten Dorji100% (1)
- IEEE Transactions on Power Electronics Active and Reactive Power ControlDokument6 SeitenIEEE Transactions on Power Electronics Active and Reactive Power Controlato ndongo fabriceNoch keine Bewertungen
- Analysis of Torque Ripple Due To Phase Commutation in Brushless DcmachinesDokument7 SeitenAnalysis of Torque Ripple Due To Phase Commutation in Brushless DcmachinesAshish KushwahaNoch keine Bewertungen
- Buck-Boost Operation Sinusoidal Inverter CircuitDokument6 SeitenBuck-Boost Operation Sinusoidal Inverter CircuitAl Bajad MamadNoch keine Bewertungen
- Для Просмотра Статьи Разгадайте КапчуDokument3 SeitenДля Просмотра Статьи Разгадайте КапчуFairuzMilkiyKuswaIINoch keine Bewertungen
- Motor Star Delta ConnectionDokument11 SeitenMotor Star Delta ConnectionsubirmeNoch keine Bewertungen
- Universal MotorsDokument17 SeitenUniversal Motorsjoseperalta.13ppNoch keine Bewertungen
- Comparative Study of Multilevel Topologies NPC Multicell InverteDokument6 SeitenComparative Study of Multilevel Topologies NPC Multicell InverteSana OthmanNoch keine Bewertungen
- Lab 9Dokument8 SeitenLab 9Youssef ZIDANINoch keine Bewertungen
- C e L L I-V Characteristic,: Shows of ofDokument4 SeitenC e L L I-V Characteristic,: Shows of ofdenemelikerdemNoch keine Bewertungen
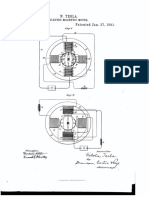
- Tesla Patent 445207Dokument3 SeitenTesla Patent 445207andy1144552Noch keine Bewertungen
- Unit-6Dokument27 SeitenUnit-6sanjay sNoch keine Bewertungen
- Mte 3 2 2019Dokument13 SeitenMte 3 2 2019Shreyas YewaleNoch keine Bewertungen
- EM2 Lab 1Dokument6 SeitenEM2 Lab 1Amit ChowdhuryNoch keine Bewertungen
- Power Factor Improvement of Single Phase Ac Voltage Controller Employing Extinction Angle ControlDokument6 SeitenPower Factor Improvement of Single Phase Ac Voltage Controller Employing Extinction Angle Controlapi-27465568100% (2)
- Harmonic Torques in Three Phase Induction Motors Supplied by Nonsinusoidal VoltagesDokument6 SeitenHarmonic Torques in Three Phase Induction Motors Supplied by Nonsinusoidal VoltagesДинка ИвановаNoch keine Bewertungen
- Self-Excited Induction Generator AnalysisDokument6 SeitenSelf-Excited Induction Generator AnalysisTaher El NoamanNoch keine Bewertungen
- Multiple Couple Circuit Modeling of Induction MachinesDokument8 SeitenMultiple Couple Circuit Modeling of Induction MachinesSavin Thusara KokuhennadigeNoch keine Bewertungen
- Self-Excited Indo Generator For V Wind Turbine Gen Le-Speed AtionDokument12 SeitenSelf-Excited Indo Generator For V Wind Turbine Gen Le-Speed AtionMichael SaandNoch keine Bewertungen
- Modeling Multimachine Transients During Power OutagesDokument4 SeitenModeling Multimachine Transients During Power OutagesCarlos CastilloNoch keine Bewertungen
- Analytica Methods For The Extraction of Parameters For Solar Cells EquationsDokument8 SeitenAnalytica Methods For The Extraction of Parameters For Solar Cells Equationsdiego.pavanello7081Noch keine Bewertungen
- 3.basic Concept of Rotating Electrical Machine PDFDokument126 Seiten3.basic Concept of Rotating Electrical Machine PDFStadpyrkhat lyngkhoiNoch keine Bewertungen
- Experiment 4 The DC Compound Generator: Muhammad Al-Ariff Bin Selamat (112215), Muhammad Azfar Amin Bin Ahmad MokhtarDokument5 SeitenExperiment 4 The DC Compound Generator: Muhammad Al-Ariff Bin Selamat (112215), Muhammad Azfar Amin Bin Ahmad MokhtarOne Love Jah LoveNoch keine Bewertungen
- Modelling and Analysis of Squirrel Cage Induction Motor With Leading Reactive Power InjectionDokument28 SeitenModelling and Analysis of Squirrel Cage Induction Motor With Leading Reactive Power InjectionMostafadarwishNoch keine Bewertungen
- Low Voltage Generator Thesis Provides Insight into Charging Storage BatteriesDokument38 SeitenLow Voltage Generator Thesis Provides Insight into Charging Storage BatteriesLowayNoch keine Bewertungen
- AC Circuit Analysis - Alexander SchureDokument100 SeitenAC Circuit Analysis - Alexander SchureDr. Gollapalli Naresh100% (1)
- A-C Circuit Analysis - Alexander SchureDokument100 SeitenA-C Circuit Analysis - Alexander SchureFranciscoCampoverdeNoch keine Bewertungen
- Machines1 Exp 3Dokument7 SeitenMachines1 Exp 3Lover BoyNoch keine Bewertungen
- Hommalai 2015Dokument5 SeitenHommalai 2015ifyNoch keine Bewertungen
- Single PhaseDokument4 SeitenSingle PhasecameenNoch keine Bewertungen
- Design Procedure for Switched-Reluctance Motors: A Step-by-Step GuideDokument6 SeitenDesign Procedure for Switched-Reluctance Motors: A Step-by-Step GuideSuman SahaNoch keine Bewertungen
- 1 s2.0 S0142061501000126 MainDokument7 Seiten1 s2.0 S0142061501000126 MainKaderNoch keine Bewertungen
- g224 Matlabi - Ir Simulation of Synchronous Generator Dynamic Operation Characteristics PDFDokument3 Seiteng224 Matlabi - Ir Simulation of Synchronous Generator Dynamic Operation Characteristics PDFaswardiNoch keine Bewertungen
- ASAT - Volume 1 - Issue A.S.A.T. CONFERENCE 14-16 May 1985 R CAIRO - Pages 1327-1334Dokument8 SeitenASAT - Volume 1 - Issue A.S.A.T. CONFERENCE 14-16 May 1985 R CAIRO - Pages 1327-1334riccardo tarelliNoch keine Bewertungen
- Experiment 4 The DC Compound Generator: Muhammad Al-Ariff Bin Selamat (112215), Muhammad Azfar Amin Bin Ahmad MokhtarDokument4 SeitenExperiment 4 The DC Compound Generator: Muhammad Al-Ariff Bin Selamat (112215), Muhammad Azfar Amin Bin Ahmad MokhtarMichael Philip ChuaNoch keine Bewertungen
- Electric MachineDokument4 SeitenElectric MachineDeepak ThapaNoch keine Bewertungen
- A General Battery Model For PV System SimulationDokument10 SeitenA General Battery Model For PV System Simulationel_ruso__83Noch keine Bewertungen
- E3G6Dokument10 SeitenE3G6NJ De GuzmanNoch keine Bewertungen
- Simulation For A 3 Phase Induction Motor Under Unbalanced ConditionsDokument4 SeitenSimulation For A 3 Phase Induction Motor Under Unbalanced ConditionsRadu BabauNoch keine Bewertungen
- A Detailed Analysis of The Nonlinear Dynamics of The Electric Step Motor, 2002.Dokument6 SeitenA Detailed Analysis of The Nonlinear Dynamics of The Electric Step Motor, 2002.Ali H. NumanNoch keine Bewertungen
- Department of Electrical Engineering - Indian Institute of Technology KharagpurDokument2 SeitenDepartment of Electrical Engineering - Indian Institute of Technology KharagpurArkadebSenguptaNoch keine Bewertungen
- Fuzzy Logic DTCDokument6 SeitenFuzzy Logic DTCBook4AllNoch keine Bewertungen
- Combined Electrical and Mechanical Model of Electric Submersible PumpsDokument7 SeitenCombined Electrical and Mechanical Model of Electric Submersible PumpsgilangpasekaNoch keine Bewertungen
- Study of Characteristics of Three Phase Induction MotorDokument32 SeitenStudy of Characteristics of Three Phase Induction MotorMohamed Omer Al Hadi100% (2)
- Control of A Power Circuit Interface of A Flywheel-Based Energy Stor-Age SystemDokument6 SeitenControl of A Power Circuit Interface of A Flywheel-Based Energy Stor-Age SystemSantiago Bonilla RiveraNoch keine Bewertungen
- Fault Location Technique For Rural Distribution Feeders: GirgisDokument6 SeitenFault Location Technique For Rural Distribution Feeders: Girgisjwsmith60Noch keine Bewertungen
- Experiment N O - 1 9: Series Motor Characteristics PurposeDokument6 SeitenExperiment N O - 1 9: Series Motor Characteristics Purposedgangopadhyay3064Noch keine Bewertungen
- A Simple Model For Transformer Inrush Current Calculation and Harmonic AnalysisDokument11 SeitenA Simple Model For Transformer Inrush Current Calculation and Harmonic AnalysisDavid LopesNoch keine Bewertungen
- Dixon 1988Dokument8 SeitenDixon 1988martin.teruelNoch keine Bewertungen
- Complex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDokument8 SeitenComplex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsJorge Luis SotoNoch keine Bewertungen
- EE-328-F Power System Lab ManualDokument24 SeitenEE-328-F Power System Lab ManualAbhilash GauravNoch keine Bewertungen
- J13-J15-J16-Engines-EE Sist ElectricoDokument37 SeitenJ13-J15-J16-Engines-EE Sist ElectricoHugo Stalinovich Rojas FernándezNoch keine Bewertungen
- NEMA MG-1 (Part 12-18)Dokument119 SeitenNEMA MG-1 (Part 12-18)Majho Canilang0% (1)
- Fault Diagnosis AC BY Current Park'S: Drives, The Average Vector ApproachDokument3 SeitenFault Diagnosis AC BY Current Park'S: Drives, The Average Vector Approachnadji mohNoch keine Bewertungen
- Lab 3 Squirrel Cage Induction Machine-1Dokument8 SeitenLab 3 Squirrel Cage Induction Machine-1max100% (1)
- Electric Drives and Their ControlDokument3 SeitenElectric Drives and Their ControlNaren Singh TanwarNoch keine Bewertungen
- Observer Based Detection and Recognition of External Disturbances For Large TurbogeneratorsDokument7 SeitenObserver Based Detection and Recognition of External Disturbances For Large TurbogeneratorsKarthik KamuniNoch keine Bewertungen
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNoch keine Bewertungen
- MIT6 096IAP11 Lec01 PDFDokument9 SeitenMIT6 096IAP11 Lec01 PDFKushNoch keine Bewertungen
- Cover LetterDokument1 SeiteCover LettermlhNoch keine Bewertungen
- SF MathDokument91 SeitenSF MathMayank SanNoch keine Bewertungen
- M. Lukman Hakim: Skills ProfileDokument2 SeitenM. Lukman Hakim: Skills ProfilemlhNoch keine Bewertungen
- Programming Guide - Zelio Soft 2Dokument45 SeitenProgramming Guide - Zelio Soft 2Bahru Din100% (2)
- Zelio Logic User ManualDokument156 SeitenZelio Logic User ManualronyvirtualNoch keine Bewertungen
- ZelioLogic CatalogueDokument48 SeitenZelioLogic CataloguemlhNoch keine Bewertungen
- Triac: From Wikipedia, The Free EncyclopediaDokument7 SeitenTriac: From Wikipedia, The Free EncyclopediaLovleenNoch keine Bewertungen
- O & M Manual For The ATC-800, 3 Position Contactor Based Transfer SwitchDokument44 SeitenO & M Manual For The ATC-800, 3 Position Contactor Based Transfer SwitchmrtabiehjNoch keine Bewertungen
- Power and Energy Calibration: Key Test and Measurement IssuesDokument4 SeitenPower and Energy Calibration: Key Test and Measurement IssuesandriusNoch keine Bewertungen
- Installation and Operation Manual: Combined Instrument Transformer PVA 123Dokument16 SeitenInstallation and Operation Manual: Combined Instrument Transformer PVA 123Dgek LondonNoch keine Bewertungen
- GM-4000F/X1R/EW Service ManualDokument24 SeitenGM-4000F/X1R/EW Service ManualMiguel FloresNoch keine Bewertungen
- Eaton 294032 DILK25 11 (230V50HZ, 240V60HZ) en - GBDokument5 SeitenEaton 294032 DILK25 11 (230V50HZ, 240V60HZ) en - GBCristo sosaNoch keine Bewertungen
- CBS Power Products User Guide Manual For SF6 Insulated Vacuum RecloserDokument145 SeitenCBS Power Products User Guide Manual For SF6 Insulated Vacuum Reclosermuhdshafiq12100% (1)
- Generator Aging FactorsDokument25 SeitenGenerator Aging Factorsarvi_vin100% (1)
- 74HC4094Dokument11 Seiten74HC4094Gustavo BarcasnegrasNoch keine Bewertungen
- LECT18: Rectangular Horn AntennasDokument28 SeitenLECT18: Rectangular Horn AntennasRobert GrubeNoch keine Bewertungen
- Technical Seminar PPT TemplateDokument16 SeitenTechnical Seminar PPT TemplateDamineni PoojithaNoch keine Bewertungen
- Recent Trend in Electrochemical Science and TechnologyDokument316 SeitenRecent Trend in Electrochemical Science and TechnologyCherry HamsteadNoch keine Bewertungen
- Sith-Model: CAE in Power-ElectronicsDokument7 SeitenSith-Model: CAE in Power-ElectronicsAbdulAzizNoch keine Bewertungen
- Template QuizizzDokument6 SeitenTemplate QuizizzFachri AbilfidaNoch keine Bewertungen
- Electrical Schematic Connection Diagrams ANDDokument27 SeitenElectrical Schematic Connection Diagrams ANDntdien923100% (2)
- Ericsson Minilink TN R4Dokument15 SeitenEricsson Minilink TN R4Ebenezer AnnanNoch keine Bewertungen
- XL4005 Xlsemi PDFDokument9 SeitenXL4005 Xlsemi PDFMario Karma LeivaNoch keine Bewertungen
- MCQ of Electronics Devices by Thomas FloydDokument14 SeitenMCQ of Electronics Devices by Thomas FloydranaateeqNoch keine Bewertungen
- Accessories For Acoustic Emission Systems: SpecificationDokument26 SeitenAccessories For Acoustic Emission Systems: SpecificationMaria Cristina DijmarescuNoch keine Bewertungen
- LMV358Dokument25 SeitenLMV358Roozbeh BahmanyarNoch keine Bewertungen
- MIT relay manual for overcurrent protectionDokument32 SeitenMIT relay manual for overcurrent protectionVijay Suryavanshi100% (3)
- C1000D5 4 PDFDokument4 SeitenC1000D5 4 PDFjavier.oyarzo.pNoch keine Bewertungen
- SEMIKRON Technical Explanation SKiiP4 F-Option EN 2017-08-30 Rev-02Dokument21 SeitenSEMIKRON Technical Explanation SKiiP4 F-Option EN 2017-08-30 Rev-02mastechNoch keine Bewertungen
- IDL-800A Digital Lab SpecificationDokument1 SeiteIDL-800A Digital Lab SpecificationDr-Eng Imad ShaheenNoch keine Bewertungen
- MCQ in Est by S Cuervo of ExcelDokument10 SeitenMCQ in Est by S Cuervo of ExcelCatherine TaubNoch keine Bewertungen
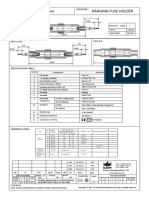
- Hanging fuse holder product detailsDokument1 SeiteHanging fuse holder product detailsbemlNoch keine Bewertungen
- Prismatic Compass (Extra Note)Dokument7 SeitenPrismatic Compass (Extra Note)Debra DeirdreNoch keine Bewertungen
- UCI274GDokument9 SeitenUCI274GChristian Rivera FloverNoch keine Bewertungen
- Magnetic Effects of Electric CurrentDokument3 SeitenMagnetic Effects of Electric Currentsonali soumyashreeNoch keine Bewertungen
- Neta Study Guide 2017rDokument122 SeitenNeta Study Guide 2017rJAVIER BETANCOURTNoch keine Bewertungen