Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Signed Acceptance PO 5385186Dokument1 SeiteSigned Acceptance PO 5385186Alfonso López JiménezNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Kura 27.09.2021 27.09.2021 17.08.2021 KURA Kura - : M (Medium)Dokument1 SeiteKura 27.09.2021 27.09.2021 17.08.2021 KURA Kura - : M (Medium)Alfonso López JiménezNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Manways Brochure 2017Dokument1 SeiteManways Brochure 2017Alfonso López JiménezNoch keine Bewertungen
- Sodium Hydrochloride (T-2850000) - RevaDokument1 SeiteSodium Hydrochloride (T-2850000) - RevaAlfonso López JiménezNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- 6064 - Catalog - PB-1.4 February 2006Dokument4 Seiten6064 - Catalog - PB-1.4 February 2006Alfonso López JiménezNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Asme in de CodeDokument4 SeitenAsme in de CodeAlfonso López JiménezNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Latex (T-2710400 T-2710500) - RevaDokument1 SeiteLatex (T-2710400 T-2710500) - RevaAlfonso López JiménezNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
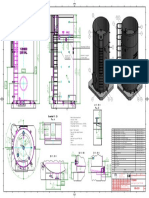
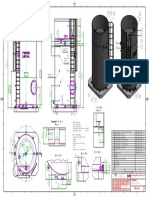
- Memoria de Calculo - Tanque PEHDDokument19 SeitenMemoria de Calculo - Tanque PEHDAlfonso López JiménezNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Sodium Hydrochloride (T-2850000) - RevaDokument1 SeiteSodium Hydrochloride (T-2850000) - RevaAlfonso López JiménezNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Dispersant (T-2800000) RevADokument1 SeiteDispersant (T-2800000) RevAAlfonso López JiménezNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Especificaciones Tank 2 - RevDokument1 SeiteEspecificaciones Tank 2 - RevAlfonso López JiménezNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Memory of Mechanical Calculations - SN TankDokument7 SeitenMemory of Mechanical Calculations - SN TankAlfonso López JiménezNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- SQ20-0056-H0-1 95 VGS 3-4-20Dokument1 SeiteSQ20-0056-H0-1 95 VGS 3-4-20Alfonso López JiménezNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Hybrid Fuzzy-PID-based Control of A Twin Rotor MIMO System: A.Rahideh M.H.ShaheedDokument6 SeitenHybrid Fuzzy-PID-based Control of A Twin Rotor MIMO System: A.Rahideh M.H.ShaheedAchmad Tri Ofandi MardiantoNoch keine Bewertungen
- Automated Machine Learning For Remaining Useful Life PredictionsDokument10 SeitenAutomated Machine Learning For Remaining Useful Life PredictionsYekanthavasanNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Introduction To Snowflake WarehousesDokument40 SeitenIntroduction To Snowflake Warehousesravikumar lankaNoch keine Bewertungen
- Unit 1 - Machine Learning - WWW - Rgpvnotes.inDokument23 SeitenUnit 1 - Machine Learning - WWW - Rgpvnotes.inxaiooNoch keine Bewertungen
- Unit 7Dokument9 SeitenUnit 7Kaysera PoetNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Chapter 4:无线探测器和执行器与实时沟通 & 数据密集型系统 & 控制论Dokument95 SeitenChapter 4:无线探测器和执行器与实时沟通 & 数据密集型系统 & 控制论gs68295Noch keine Bewertungen
- C19 - Group 1 - History and Trends in Management-ReportingDokument12 SeitenC19 - Group 1 - History and Trends in Management-Reportingsharlyn graceNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- HyperparametersDokument15 SeitenHyperparametersrajaNoch keine Bewertungen
- QCM Bigdata 1 ExampdfDokument7 SeitenQCM Bigdata 1 Exampdfyounes khounaNoch keine Bewertungen
- Artificial Neural NetworksDokument19 SeitenArtificial Neural NetworksPriyanshiNoch keine Bewertungen
- Research ProposalDokument8 SeitenResearch ProposalJavaria Chiragh100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Support Vector Machines For Wind Speed PredictionDokument9 SeitenSupport Vector Machines For Wind Speed PredictionPuja Dwi LestariNoch keine Bewertungen
- School of Technology: Simulation and ModellingDokument38 SeitenSchool of Technology: Simulation and ModellingOlivia GwenNoch keine Bewertungen
- Neural Networks and Fuzzy Logic 19APC0216 MinDokument71 SeitenNeural Networks and Fuzzy Logic 19APC0216 MinGouthami RamidiNoch keine Bewertungen
- Basicmpc MDokument4 SeitenBasicmpc Mjiugarte1Noch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grain Quality Detection by Using Neural NetworkDokument20 SeitenGrain Quality Detection by Using Neural NetworkSaurabh KumarNoch keine Bewertungen
- ProposalDokument3 SeitenProposalAshish Roy0% (1)
- F GaddyDokument7 SeitenF GaddyspyeagleNoch keine Bewertungen
- Capsule NetworkDokument8 SeitenCapsule NetworkMalia HaleNoch keine Bewertungen
- Ann R16 Unit 4 PDFDokument16 SeitenAnn R16 Unit 4 PDFsricharanreddymamidiNoch keine Bewertungen
- What Is Interpersonal CommunicationDokument4 SeitenWhat Is Interpersonal CommunicationBhupendra SharmaNoch keine Bewertungen
- Simulink Basics TutorialDokument143 SeitenSimulink Basics TutorialHiếu HuỳnhNoch keine Bewertungen
- 2019 Dse Ict 2a eDokument13 Seiten2019 Dse Ict 2a eNitin VisheNoch keine Bewertungen
- Artificial Intelligence and ChatGPT - The Future WorldDokument10 SeitenArtificial Intelligence and ChatGPT - The Future WorldRebecca100% (3)
- Pyabsa: Open Framework For Aspect-Based Sentiment AnalysisDokument11 SeitenPyabsa: Open Framework For Aspect-Based Sentiment Analysisreij3Noch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Prelims - 3 Communication Processes, Principles, and Ethics PDFDokument47 SeitenPrelims - 3 Communication Processes, Principles, and Ethics PDFCezar PunoNoch keine Bewertungen
- Robotics Explorer Complete (Arduino & Block-Based Coding) - 50 Classes Project Name Concepts Class NoDokument2 SeitenRobotics Explorer Complete (Arduino & Block-Based Coding) - 50 Classes Project Name Concepts Class NoDivya KNoch keine Bewertungen
- Environmental Pollution Analysis and Prediction of Influential Factors: A Data-Driven InvestigationDokument14 SeitenEnvironmental Pollution Analysis and Prediction of Influential Factors: A Data-Driven InvestigationIJAR JOURNALNoch keine Bewertungen
- Pid Controller Using Ziegler Nichols MethodDokument7 SeitenPid Controller Using Ziegler Nichols MethodMuhammad RedhaNoch keine Bewertungen
- ELG3155 - Control SystemsDokument5 SeitenELG3155 - Control SystemsTurab HaiderNoch keine Bewertungen