Das könnte Ihnen auch gefallen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- ReadmeDokument21 SeitenReadmeAntonio FrontadoNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Out of This World Manual DOSDokument5 SeitenOut of This World Manual DOSAnonymous FGY7goNoch keine Bewertungen
- Out of This World Manual DOSDokument5 SeitenOut of This World Manual DOSAnonymous FGY7goNoch keine Bewertungen
- Indiana Jones and The Fate Manual DosDokument11 SeitenIndiana Jones and The Fate Manual DosAnonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Piano Tuning 3Dokument4 SeitenPiano Tuning 3Anonymous FGY7goNoch keine Bewertungen
- Manual 2072Dokument124 SeitenManual 2072heni23Noch keine Bewertungen
- Read MeDokument1 SeiteRead Mebebek machoNoch keine Bewertungen
- DeckTHe HallsDokument3 SeitenDeckTHe HallsAnonymous FGY7goNoch keine Bewertungen
- Nec Multisync® Lcd2170Nx: Fully Featured Office Monitors With Outstanding Display Quality and Ergonomic PerformanceDokument2 SeitenNec Multisync® Lcd2170Nx: Fully Featured Office Monitors With Outstanding Display Quality and Ergonomic PerformanceAnonymous FGY7goNoch keine Bewertungen
- J Sons ChemaDokument80 SeitenJ Sons Chemabebop76Noch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- 789D Off-Highway Truck Electrical System: Headliner WiringDokument6 Seiten789D Off-Highway Truck Electrical System: Headliner WiringOscar GomezNoch keine Bewertungen
- Icon Pro StarDokument1 SeiteIcon Pro Staramateur123456100% (1)
- 0044-092-05 - Fireray One User Guide EnglishDokument16 Seiten0044-092-05 - Fireray One User Guide EnglishVladimir BukaricaNoch keine Bewertungen
- CH 16 (1-27-05)Dokument29 SeitenCH 16 (1-27-05)David AlexanderNoch keine Bewertungen
- TP03AL220S03LSW 2W 85-265VAC Input 3.3VDC OutputDokument3 SeitenTP03AL220S03LSW 2W 85-265VAC Input 3.3VDC OutputtoppowerNoch keine Bewertungen
- Etap PDFDokument2 SeitenEtap PDFAmandaNoch keine Bewertungen
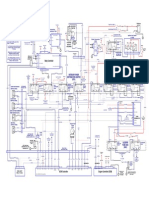
- Level Monitor DATUM SCU500 LOOPDokument20 SeitenLevel Monitor DATUM SCU500 LOOPJose Manuel Vazquez ZarcoNoch keine Bewertungen
- STRONG SRT4155Evolution Service Manual PDFDokument32 SeitenSTRONG SRT4155Evolution Service Manual PDFTim SmytheNoch keine Bewertungen
- Micro Component System: InstructionsDokument0 SeitenMicro Component System: InstructionsHristuNoch keine Bewertungen
- Unisonic Technologies Co., LTD: Eight High Voltage, High Current Darlington ArraysDokument5 SeitenUnisonic Technologies Co., LTD: Eight High Voltage, High Current Darlington ArraysTojo BasheerNoch keine Bewertungen
- Course+Assessment+Rubrics+Microprocessor+Interfacing+ +programmingDokument3 SeitenCourse+Assessment+Rubrics+Microprocessor+Interfacing+ +programmingHassan AliNoch keine Bewertungen
- Glass & Tantalum Capacitors ConsignmentDokument28 SeitenGlass & Tantalum Capacitors ConsignmentCIO White PapersNoch keine Bewertungen
- Ecom En2 Parts ListDokument6 SeitenEcom En2 Parts ListGhoza AbiwaraNoch keine Bewertungen
- COntoh Jurnal ProsidingDokument9 SeitenCOntoh Jurnal Prosidingfebrian nandaNoch keine Bewertungen
- Submittal Data: VRF Outdoor Unit 38VMA216HDS5-1 - Heat PumpDokument3 SeitenSubmittal Data: VRF Outdoor Unit 38VMA216HDS5-1 - Heat PumpHernandoLopezUNoch keine Bewertungen
- 300Mbps Wireless N PCI Adapter: TL-WN851NDDokument2 Seiten300Mbps Wireless N PCI Adapter: TL-WN851NDRiyan LesmanaNoch keine Bewertungen
- MS-7003 ManualDokument5 SeitenMS-7003 ManualDaniel Pulido RojasNoch keine Bewertungen
- A Broadband 10-43-GHz High-Gain LNA MMICDokument4 SeitenA Broadband 10-43-GHz High-Gain LNA MMICسري صالحNoch keine Bewertungen
- 1MRK512011-BEN A en COMBITEST - CAT III Test SystemDokument16 Seiten1MRK512011-BEN A en COMBITEST - CAT III Test Systemjoseanto.soosaimichaelNoch keine Bewertungen
- AP-105 Wireless Access Point: Installation GuideDokument2 SeitenAP-105 Wireless Access Point: Installation GuideKalan KlNoch keine Bewertungen
- Electrical Terms Class VocabularyDokument4 SeitenElectrical Terms Class VocabularyuvwavelengthNoch keine Bewertungen
- 32ld340h Hotel TV Owners Man PDFDokument317 Seiten32ld340h Hotel TV Owners Man PDFJoel HeinzNoch keine Bewertungen
- Evga X79 Motherboard: User GuideDokument35 SeitenEvga X79 Motherboard: User GuideronuildoNoch keine Bewertungen
- Virtual-Circuit Networks: Frame Relay and ATMDokument24 SeitenVirtual-Circuit Networks: Frame Relay and ATMdil_18100% (1)
- Motor Test Dynamo MetersDokument9 SeitenMotor Test Dynamo MetersDhaneshwar PatilNoch keine Bewertungen
- TKSG-4000 Maintenance-ManualDokument184 SeitenTKSG-4000 Maintenance-ManualConnie Taiba100% (1)
- Catálogo Castell 2022Dokument72 SeitenCatálogo Castell 2022Bruce CoxNoch keine Bewertungen
- Unsymmetrical Fault AnalysisDokument22 SeitenUnsymmetrical Fault AnalysissujapsgNoch keine Bewertungen
- Profibus-Dp: Installation ManualDokument38 SeitenProfibus-Dp: Installation ManualLeandroNoch keine Bewertungen
- 19eee114 Lab4Dokument3 Seiten19eee114 Lab4Surya MurugesanNoch keine Bewertungen