Das könnte Ihnen auch gefallen
- Casos de Atencion Al Cliente .....Dokument3 SeitenCasos de Atencion Al Cliente .....Alexander Castillo Mayta100% (1)
- Pasos para Extender La Licencia de Evaluación Del Software MultisimDokument5 SeitenPasos para Extender La Licencia de Evaluación Del Software MultisimAlexander Castillo MaytaNoch keine Bewertungen
- Scio Basic Manual SpanishDokument20 SeitenScio Basic Manual SpanishMonica FernandezNoch keine Bewertungen
- Sustentacion Compensador Adelanto-Atraso g1Dokument17 SeitenSustentacion Compensador Adelanto-Atraso g1Carlos LópezNoch keine Bewertungen
- Escalamiento Señales AnalógicasDokument3 SeitenEscalamiento Señales AnalógicasArte VidriosNoch keine Bewertungen
- Presentación Agrominerales - SEGEMAR INTEMIN - Alejandro FernándezDokument26 SeitenPresentación Agrominerales - SEGEMAR INTEMIN - Alejandro FernándezFernando BacotNoch keine Bewertungen
- Cerradura Electrónica Codificad1Dokument6 SeitenCerradura Electrónica Codificad1Marlon Glowing SalasNoch keine Bewertungen
- Diseño de Fuente de DC Con Filtro LCDokument6 SeitenDiseño de Fuente de DC Con Filtro LCХьюго Хоакин Кость0% (1)
- Filtro Por CondensadorDokument13 SeitenFiltro Por CondensadorYesid Salcedo JimenezNoch keine Bewertungen
- Tema 1: Diodos y Transistores de PotenciaDokument62 SeitenTema 1: Diodos y Transistores de PotenciaMIGUEL GASPAR-MAN2017Noch keine Bewertungen
- 4 CAPITULO 2 Modelamiento DinamicoDokument32 Seiten4 CAPITULO 2 Modelamiento DinamicoJuanManuelHurtadoValdiviaNoch keine Bewertungen
- Ao FinalDokument12 SeitenAo Finalkmilo prietoNoch keine Bewertungen
- 17 Dispositivos de Disparo Ujt y PutDokument9 Seiten17 Dispositivos de Disparo Ujt y PutRicardo LopezNoch keine Bewertungen
- Informe Final 2 PotenciaDokument4 SeitenInforme Final 2 PotenciaJorge MoreNoch keine Bewertungen
- Laboratorio TresDokument8 SeitenLaboratorio TresSergio Cantillo LunaNoch keine Bewertungen
- Ejer PropuestosDokument6 SeitenEjer PropuestosRicardo BarrionuevoNoch keine Bewertungen
- Distintos Tipos de Convertidores Análogos y DigitalesDokument4 SeitenDistintos Tipos de Convertidores Análogos y DigitalesAlber Lim GboNoch keine Bewertungen
- SD Hoja Guia 9 2020BDokument2 SeitenSD Hoja Guia 9 2020BAlexander LaraNoch keine Bewertungen
- Automatizacion - Previo 5.2Dokument3 SeitenAutomatizacion - Previo 5.2KancoGonzalesCNoch keine Bewertungen
- PC Cuadrada Pulsos Multiples UnipolarDokument51 SeitenPC Cuadrada Pulsos Multiples Unipolarbryan eduardo villegas carrascoNoch keine Bewertungen
- Amplificadores de InstrumentacionDokument9 SeitenAmplificadores de InstrumentacionCarolina Rico OlarteNoch keine Bewertungen
- Informe 7 FSKDokument8 SeitenInforme 7 FSKLeviatannlpNoch keine Bewertungen
- Spasado15-2 ELT2590Dokument35 SeitenSpasado15-2 ELT2590Elvis C CNoch keine Bewertungen
- Tiristores y Triacs Henri Lilen e Pubme PDF Free 5Dokument15 SeitenTiristores y Triacs Henri Lilen e Pubme PDF Free 5Juan Jesus Ramirez RodriguezNoch keine Bewertungen
- Diseño de Disparo de Un SCR Con R-CDokument6 SeitenDiseño de Disparo de Un SCR Con R-Cpaco_tunNoch keine Bewertungen
- Cómo Influye La Amplitud de La Señal Portadora en La Salida Del ModuladorDokument2 SeitenCómo Influye La Amplitud de La Señal Portadora en La Salida Del ModuladorKevin MaldonadoNoch keine Bewertungen
- Clase 11-2019-1 Serie de FourierDokument42 SeitenClase 11-2019-1 Serie de Fourierestevan gutierrezNoch keine Bewertungen
- Reporte de Seguidor de LineaDokument10 SeitenReporte de Seguidor de LineaRaymond KenneyNoch keine Bewertungen
- Diagrama de Contactos y Diagrama de Fuerza Con CadesimuDokument7 SeitenDiagrama de Contactos y Diagrama de Fuerza Con CadesimuMauro M Janco BernabeNoch keine Bewertungen
- Lab3 CONTROL DIGTAL 2020ADokument3 SeitenLab3 CONTROL DIGTAL 2020ACésar Jesús AlcaláNoch keine Bewertungen
- Módulo L298NDokument7 SeitenMódulo L298NHe Gal CiaNoch keine Bewertungen
- Laboratorio-Sistemas Control Digital-3 PDFDokument5 SeitenLaboratorio-Sistemas Control Digital-3 PDFBoris Benites CalenzaniNoch keine Bewertungen
- Trabajo DomiciliarioDokument6 SeitenTrabajo Domiciliariocomte6668991Noch keine Bewertungen
- ESA Práctica 1 Caracterización de Altavoces Curso 2014-15 V01Dokument23 SeitenESA Práctica 1 Caracterización de Altavoces Curso 2014-15 V01jaime1180Noch keine Bewertungen
- Diseño de Controladores Digitales - DeadbeatDokument8 SeitenDiseño de Controladores Digitales - DeadbeatFelipe MoreraNoch keine Bewertungen
- Clase 1 NDokument38 SeitenClase 1 Nwilliam.123Noch keine Bewertungen
- SCR PDFDokument50 SeitenSCR PDFJuan Carlos VegaNoch keine Bewertungen
- CODIFICACION BINARIA (Paper Teoria)Dokument6 SeitenCODIFICACION BINARIA (Paper Teoria)Joseph Muje RamosNoch keine Bewertungen
- Lab2 MDokument9 SeitenLab2 MJulio Orlando MedranoNoch keine Bewertungen
- LAB2 Amp Simetria ComplementariaDokument4 SeitenLAB2 Amp Simetria ComplementariaJEAN LEONARDO ESTRADA ROQUENoch keine Bewertungen
- Reporte PWMDokument9 SeitenReporte PWMMoises EsquivelNoch keine Bewertungen
- MCT TiristorDokument2 SeitenMCT TiristorGonzalo ViñamaguaNoch keine Bewertungen
- Ejercicios Resueltos de Transductores en Instrumentación ElectrónicaDokument6 SeitenEjercicios Resueltos de Transductores en Instrumentación ElectrónicaAlfredo PérezNoch keine Bewertungen
- Tabla Filtros Activos FMPDokument4 SeitenTabla Filtros Activos FMPErick LoolNoch keine Bewertungen
- Ujt SCRDokument26 SeitenUjt SCRLuis Antonio Mairena AcostaNoch keine Bewertungen
- 1.7 PCM DiferencialDokument42 Seiten1.7 PCM DiferencialBarrabas Islas LopezNoch keine Bewertungen
- Lab 4 - ADC-DAC-2018 - 2Dokument3 SeitenLab 4 - ADC-DAC-2018 - 2fieeg4Noch keine Bewertungen
- CuestionarioDokument10 SeitenCuestionario25 Olmedo RenatoNoch keine Bewertungen
- Práctica 5 - Salida AnalógicaDokument4 SeitenPráctica 5 - Salida AnalógicaTatiana Romero FeijooNoch keine Bewertungen
- ARQUI - 2017C - USART AVR - Comunicación Serial - Ejemplos - InterrupcionesDokument27 SeitenARQUI - 2017C - USART AVR - Comunicación Serial - Ejemplos - InterrupcionesElvis Justo Vilca CárdenasNoch keine Bewertungen
- Amplificadores Operacionales de Banda AnchaDokument6 SeitenAmplificadores Operacionales de Banda AnchaEdwin Javier Garavito HernándezNoch keine Bewertungen
- Ci MM74C922Dokument9 SeitenCi MM74C922JOSE FRANCIA ZORRILLANoch keine Bewertungen
- H - Simuladores de Circuitos ElectricosDokument58 SeitenH - Simuladores de Circuitos ElectricosJorge CardenasNoch keine Bewertungen
- Práctica 09 - UJAP 2015-1 Generador de Onda CuadradaDokument2 SeitenPráctica 09 - UJAP 2015-1 Generador de Onda Cuadradagian franco lo piparoNoch keine Bewertungen
- Rectificadores ControladosDokument33 SeitenRectificadores ControladosAnonymous GsVxgPE9Noch keine Bewertungen
- Exámenes Control2Dokument7 SeitenExámenes Control2Hugo Quezada AlegríaNoch keine Bewertungen
- Transformada Z Con Matlab NataDokument12 SeitenTransformada Z Con Matlab NataNataly Ipuz PalomaNoch keine Bewertungen
- Problemas Electronica de PotenciaDokument1 SeiteProblemas Electronica de PotenciaBenjamin Samaniego ErazoNoch keine Bewertungen
- Tip 120Dokument9 SeitenTip 120William Santiago CH TenesacaNoch keine Bewertungen
- 2.1 Rectificador Monofásico No ControladoDokument13 Seiten2.1 Rectificador Monofásico No ControladoPepe Paredes Mendez100% (1)
- Comunicacion Serial SincronaDokument24 SeitenComunicacion Serial Sincronaandres8179Noch keine Bewertungen
- Sistemas de Control PremaestriaDokument45 SeitenSistemas de Control PremaestriaEDINSON HERRERA VASQUEZNoch keine Bewertungen
- S01.s2. Ejemplos de Sistemas de ControlDokument11 SeitenS01.s2. Ejemplos de Sistemas de ControlCarlos LONoch keine Bewertungen
- LAB1 Rectif. MonofasicoDokument7 SeitenLAB1 Rectif. MonofasicoAlexander Castillo MaytaNoch keine Bewertungen
- Inversor e MaphamDokument4 SeitenInversor e MaphamWilbert Amanca Cordova100% (1)
- Federación Internacional de Derechos HumanosDokument68 SeitenFederación Internacional de Derechos HumanosJorge GarcíaNoch keine Bewertungen
- Transformada Lab1Dokument2 SeitenTransformada Lab1Alexander Castillo MaytaNoch keine Bewertungen
- Inversores PWM IDokument27 SeitenInversores PWM IAlexander Castillo MaytaNoch keine Bewertungen
- Condicional Ireal Ingles 10-02-2020Dokument1 SeiteCondicional Ireal Ingles 10-02-2020Alexander Castillo MaytaNoch keine Bewertungen
- Tabla de Conversion PresionDokument1 SeiteTabla de Conversion PresionAlexander Castillo MaytaNoch keine Bewertungen
- Exposición Filtros DigitalesDokument4 SeitenExposición Filtros DigitalesAlexander Castillo MaytaNoch keine Bewertungen
- Foda Personal JeniferDokument1 SeiteFoda Personal JeniferAlexander Castillo MaytaNoch keine Bewertungen
- R 8020Dokument4 SeitenR 8020Angel VazquezNoch keine Bewertungen
- Ciclo de Vida de Un Producto ResumenDokument2 SeitenCiclo de Vida de Un Producto ResumenAlexander Castillo MaytaNoch keine Bewertungen
- Guia de Problemas Maquinas ElectricasDokument68 SeitenGuia de Problemas Maquinas ElectricasGiovanni QC100% (1)
- Comoponentes ElectronicosDokument65 SeitenComoponentes ElectronicosLuis Antonio AsprillaNoch keine Bewertungen
- Informe CristianDokument7 SeitenInforme CristianAlexander Castillo MaytaNoch keine Bewertungen
- Conexiones Con Varios TransistoresDokument12 SeitenConexiones Con Varios TransistoresRoberto Rocca JuárezNoch keine Bewertungen
- Trabajo Amplificador EstereoDokument30 SeitenTrabajo Amplificador Estereojaneth rodriguezNoch keine Bewertungen
- Balotario Metodos NumericosDokument4 SeitenBalotario Metodos NumericosLuisNoch keine Bewertungen
- Suspension Laboral......Dokument1 SeiteSuspension Laboral......Alexander Castillo MaytaNoch keine Bewertungen
- Suspension LaboralDokument1 SeiteSuspension LaboralAlexander Castillo MaytaNoch keine Bewertungen
- ¿Cuáles Son La Difetencias Ente AFP y ONP?Dokument1 Seite¿Cuáles Son La Difetencias Ente AFP y ONP?Alexander Castillo MaytaNoch keine Bewertungen
- Comoponentes ElectronicosDokument65 SeitenComoponentes ElectronicosLuis Antonio AsprillaNoch keine Bewertungen
- Guia de Problemas Maquinas ElectricasDokument68 SeitenGuia de Problemas Maquinas ElectricasGiovanni QC100% (1)
- Desarrollo Organizacional..... ViernesDokument2 SeitenDesarrollo Organizacional..... ViernesAlexander Castillo MaytaNoch keine Bewertungen
- Casos - de - Atencion - Al - Cliente .....Dokument3 SeitenCasos - de - Atencion - Al - Cliente .....Alexander Castillo Mayta0% (1)
- Contrato EcuadorDokument4 SeitenContrato EcuadorAlexander Castillo MaytaNoch keine Bewertungen
- Incoterms Ex Works 019Dokument6 SeitenIncoterms Ex Works 019Alexander Castillo MaytaNoch keine Bewertungen
- Comercio ExteriorDokument2 SeitenComercio ExteriorAlexander Castillo MaytaNoch keine Bewertungen
- Tutorial ImovieDokument35 SeitenTutorial Imovieel_alfred6960% (1)
- Estudio Urbano - Fábrica de Música PDFDokument156 SeitenEstudio Urbano - Fábrica de Música PDFMaría Isabel RojasNoch keine Bewertungen
- TALLER MQ Sincro-1Dokument1 SeiteTALLER MQ Sincro-1Felipe CobaledaNoch keine Bewertungen
- Lab 4Dokument8 SeitenLab 4Franklin Daniel Carbajal OsisNoch keine Bewertungen
- Informe Tecnico de Residencia Profesional S5-S7Dokument67 SeitenInforme Tecnico de Residencia Profesional S5-S7Juvenal G. C. GallardoNoch keine Bewertungen
- El Metodo de La Moneda de Cobre para Reparar Una LaptopDokument21 SeitenEl Metodo de La Moneda de Cobre para Reparar Una LaptoprepoliNoch keine Bewertungen
- Direccionamiento de Memoria y PilaDokument14 SeitenDireccionamiento de Memoria y PilaXavier Martínez MoctezumaNoch keine Bewertungen
- Iei06 Tarea2Dokument12 SeitenIei06 Tarea2miuv0% (1)
- Lab2p2 PDFDokument2 SeitenLab2p2 PDFJorge Luis RodriguezNoch keine Bewertungen
- Tipos de SensoresDokument3 SeitenTipos de SensoresEliuth Cruz CamarilloNoch keine Bewertungen
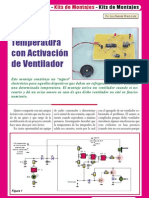
- 12 Alarma de TemperaturaDokument2 Seiten12 Alarma de TemperaturaRicardo TapiaNoch keine Bewertungen
- Reporte Práctica 7 (Terminada)Dokument8 SeitenReporte Práctica 7 (Terminada)Victor Manuel Dominguez MorenoNoch keine Bewertungen
- Corriente y ResistenciaDokument24 SeitenCorriente y ResistenciaMarco CelayaNoch keine Bewertungen
- Problemas de CapacitanciaDokument3 SeitenProblemas de CapacitanciaJhon BrionesNoch keine Bewertungen
- (Solucionado) - Monitor LG W1934S Enciende y A Los Segundos Se Apaga - TV LCD, Plasma y Oled - YoReparoDokument3 Seiten(Solucionado) - Monitor LG W1934S Enciende y A Los Segundos Se Apaga - TV LCD, Plasma y Oled - YoReparonogomo_87Noch keine Bewertungen
- Informe de Lufussa 46Dokument37 SeitenInforme de Lufussa 46Ismary EspinalNoch keine Bewertungen
- Cables Con Cero Contenido de HalógenosDokument10 SeitenCables Con Cero Contenido de HalógenosAlfredo GilNoch keine Bewertungen
- Cálculo de Cortocircuitos TrifásicosDokument4 SeitenCálculo de Cortocircuitos TrifásicoscrackrrascoNoch keine Bewertungen
- Practica No. 4Dokument4 SeitenPractica No. 4buanastareasbetovazquezNoch keine Bewertungen
- R.U.C. 20467534026 Boleta de Venta Electronica: América Móvil Perú S.A.CDokument1 SeiteR.U.C. 20467534026 Boleta de Venta Electronica: América Móvil Perú S.A.CGabriel Torres BenturaNoch keine Bewertungen
- Electricidad Domiciliaria cl3Dokument3 SeitenElectricidad Domiciliaria cl3Pablo Damian ChavezNoch keine Bewertungen
- FREETOX N2XSOH 8 KV 133 500 KcmilDokument4 SeitenFREETOX N2XSOH 8 KV 133 500 KcmilAldo ECNoch keine Bewertungen
- Profit RaceDokument7 SeitenProfit RaceRodrigoBurgosNoch keine Bewertungen
- Presentacion 4GDokument12 SeitenPresentacion 4GAlejandro OrtizNoch keine Bewertungen
- Practica de Laboratorio 1,2,3Dokument8 SeitenPractica de Laboratorio 1,2,3Uriel SalinasNoch keine Bewertungen
- Topicos Selectos Unidad 1Dokument9 SeitenTopicos Selectos Unidad 1Uva Verde Sin SemillaNoch keine Bewertungen