Das könnte Ihnen auch gefallen
- SILABO - ABET-MC417 - UltDokument6 SeitenSILABO - ABET-MC417 - Ultalter147Noch keine Bewertungen
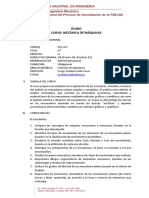
- Silabo Del Curso Mecánica de MáquinasDokument7 SeitenSilabo Del Curso Mecánica de MáquinasJhosep Yamil Cerna CastroNoch keine Bewertungen
- Silabo MC 516 (2021-I) (6.4.21)Dokument8 SeitenSilabo MC 516 (2021-I) (6.4.21)Victor Angel Fuertes SaboyaNoch keine Bewertungen
- Informe Manivela-CorrederaDokument30 SeitenInforme Manivela-CorrederaPauli CampoverdeNoch keine Bewertungen
- Silabo MECANISMOSMC4161Dokument5 SeitenSilabo MECANISMOSMC4161Angelo Ramos SibajaNoch keine Bewertungen
- Análisis y Síntesis de MecanismosDokument7 SeitenAnálisis y Síntesis de MecanismosbaltazarNoch keine Bewertungen
- MECANISMOSDokument4 SeitenMECANISMOSCarmen Alicia RbNoch keine Bewertungen
- Cinemática y Cinética de Un Mecanismo FinalDokument28 SeitenCinemática y Cinética de Un Mecanismo FinalAngel Gamarra MirandaNoch keine Bewertungen
- Mecanismo PROYECTODokument16 SeitenMecanismo PROYECTOmads drakzen caballero ruedaNoch keine Bewertungen
- Silabo MC417Dokument5 SeitenSilabo MC417anajulcaNoch keine Bewertungen
- Diseno de MaquinaDokument4 SeitenDiseno de MaquinaLeonel UrbinaNoch keine Bewertungen
- Cuaderno de Diseño de Elementos TotalDokument136 SeitenCuaderno de Diseño de Elementos TotalIsrael Espinoza100% (1)
- TMP - 26613-Análisis de Mecanismos-707697749 PDFDokument75 SeitenTMP - 26613-Análisis de Mecanismos-707697749 PDFRonny AcostaNoch keine Bewertungen
- Analisis de Mecanismos y MáquinasDokument1 SeiteAnalisis de Mecanismos y MáquinasAnyi Maria Del Pilar Garay BeltranNoch keine Bewertungen
- Análisis de MecanismosDokument75 SeitenAnálisis de Mecanismosmonchocota0% (1)
- Silabo mt517 - ABETDokument3 SeitenSilabo mt517 - ABETthoting100% (1)
- Motor de PistonDokument40 SeitenMotor de PistonCintia Sarr100% (1)
- Httpsaulavirtual2.unitru - Edu.pepluginfile - Php1214995mod assignintroattachment0TMM 2022 2 L1.pdfforcedownload 1Dokument19 SeitenHttpsaulavirtual2.unitru - Edu.pepluginfile - Php1214995mod assignintroattachment0TMM 2022 2 L1.pdfforcedownload 1RICARDO ALEXANDER LAZARO SANCHEZNoch keine Bewertungen
- Fundamentos de MecanismosDokument8 SeitenFundamentos de MecanismosJesus Alejandro Fernandez DelgadoNoch keine Bewertungen
- Mato Guia de Aprendizaje Elementos Mecanicos AutomatizacionDokument5 SeitenMato Guia de Aprendizaje Elementos Mecanicos Automatizacionesney500Noch keine Bewertungen
- Sintesis y Dinamica de MecanismosDokument3 SeitenSintesis y Dinamica de MecanismosMechAttackNoch keine Bewertungen
- Teoria de Maquinas y Mecanismos Im514 2020Dokument2 SeitenTeoria de Maquinas y Mecanismos Im514 2020Luis MejiaNoch keine Bewertungen
- Manual Prácticas MecanismosDokument39 SeitenManual Prácticas MecanismosHoracio Guadarrama CadenaNoch keine Bewertungen
- S+¡labo MECANISMOS Y DINAMICA DE MAQUINAS 2018-ADokument11 SeitenS+¡labo MECANISMOS Y DINAMICA DE MAQUINAS 2018-AJoseph Cristian Cruz LuqueNoch keine Bewertungen
- Mecanismos. Analisis de Fuerzas y Pares en MecanismosDokument18 SeitenMecanismos. Analisis de Fuerzas y Pares en MecanismosCarlos ValldezNoch keine Bewertungen
- MÉCANISMOS Guia de TrabajoDokument7 SeitenMÉCANISMOS Guia de TrabajoDanny QuinatoaNoch keine Bewertungen
- MECANISMOSDokument4 SeitenMECANISMOSARLENA BRACHONoch keine Bewertungen
- Silabo Mecanica GeneralDokument6 SeitenSilabo Mecanica Generalnaomi98Noch keine Bewertungen
- Erick Cavazos Rodriguez - 2074392 - Practica #1 - DinamicaDokument8 SeitenErick Cavazos Rodriguez - 2074392 - Practica #1 - DinamicaJennifer LunaNoch keine Bewertungen
- Nociones Generales Sobre MecanismosDokument55 SeitenNociones Generales Sobre MecanismosJhon Antony De CopasNoch keine Bewertungen
- Clase #3 Definición de Máquina y MecanismoDokument38 SeitenClase #3 Definición de Máquina y Mecanismoboletasprimaria.uecmscNoch keine Bewertungen
- Practicas Dinamica - 1639815-BrayanGuzmanDokument41 SeitenPracticas Dinamica - 1639815-BrayanGuzmanJohn SemonNoch keine Bewertungen
- Mecanismos IVDokument48 SeitenMecanismos IVMarthiitaa PerezNoch keine Bewertungen
- 01BCS - Mecanismos - Tema1 - 1Dokument79 Seiten01BCS - Mecanismos - Tema1 - 1VerónicaMhNoch keine Bewertungen
- Mecanica RacionalDokument6 SeitenMecanica RacionalMarco Junior FernandezNoch keine Bewertungen
- Programa Asignatura MC-2414 Dinámica de MáquinasDokument2 SeitenPrograma Asignatura MC-2414 Dinámica de Máquinascesar.gutierrezgNoch keine Bewertungen
- MC2414 Dinamica de MaquinasDokument2 SeitenMC2414 Dinamica de MaquinasWalter MorenoNoch keine Bewertungen
- MC417Dokument5 SeitenMC417Hector Luis UgarteNoch keine Bewertungen
- Silabo MT516Dokument3 SeitenSilabo MT516Tony CamposNoch keine Bewertungen
- Practica 1 Conceptos Basicos de DinamicaDokument6 SeitenPractica 1 Conceptos Basicos de DinamicaEmilio CalderonNoch keine Bewertungen
- MecanismosDokument7 SeitenMecanismosmmarkCoNoch keine Bewertungen
- Informe 2Dokument34 SeitenInforme 2Jhonathan Leo Uchamaco NoaNoch keine Bewertungen
- Tema 1 Introducción A La Teoría de Mecanismos y MáquinasDokument17 SeitenTema 1 Introducción A La Teoría de Mecanismos y Máquinasalbertocc1978Noch keine Bewertungen
- Análisis de Posición de Mecanismos Planos Por Métodos Gráficos y AnalíticosDokument3 SeitenAnálisis de Posición de Mecanismos Planos Por Métodos Gráficos y AnalíticosMarieLa Narváez100% (4)
- Trabajo de MecanismoDokument8 SeitenTrabajo de MecanismoJosé Alberto Campos MartinezNoch keine Bewertungen
- Mecanismos ProyectDokument14 SeitenMecanismos ProyectGeo OñaNoch keine Bewertungen
- Teoría de Máquinas y MecanismosDokument2 SeitenTeoría de Máquinas y MecanismosHAMMERLY RODRIGO MESTANZA MEZANoch keine Bewertungen
- SilaboDokument4 SeitenSilaboAchorroNoch keine Bewertungen
- Introducción A La Dinámica de MaquinariaDokument5 SeitenIntroducción A La Dinámica de MaquinariaJesusNoch keine Bewertungen
- Temario Mecanismos UnamDokument1 SeiteTemario Mecanismos UnamLui2McCartneyNoch keine Bewertungen
- Mecanismos IVDokument47 SeitenMecanismos IVdanherzNoch keine Bewertungen
- REPORTE #1 CONCEPTOS BÁSICOS DE DINÁMICA - RemovedDokument7 SeitenREPORTE #1 CONCEPTOS BÁSICOS DE DINÁMICA - RemovedDiego CorpusNoch keine Bewertungen
- Tema 1. - Conceptos Básicos y Topológicos de Los MecanismosDokument11 SeitenTema 1. - Conceptos Básicos y Topológicos de Los MecanismosAngel O Paredes BalanNoch keine Bewertungen
- Mecanismos Unidad 2Dokument12 SeitenMecanismos Unidad 2Jose Salaya JuventahinoNoch keine Bewertungen
- Mecatrónica: modelado, simulación y control de sistemas físicosVon EverandMecatrónica: modelado, simulación y control de sistemas físicosNoch keine Bewertungen
- UF1253 - Diagnóstico de deformaciones estructuralesVon EverandUF1253 - Diagnóstico de deformaciones estructuralesNoch keine Bewertungen
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalVon EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalBewertung: 5 von 5 Sternen5/5 (4)
- Operatividad con sistemas mecánicos, hidráulicos, neumáticos y eléctricos de máquinas e instalaciones para la transformación de políme. y su manten. QUIT0209Von EverandOperatividad con sistemas mecánicos, hidráulicos, neumáticos y eléctricos de máquinas e instalaciones para la transformación de políme. y su manten. QUIT0209Noch keine Bewertungen
- Posicionado y control de la estructura en bancada. TMVL0309Von EverandPosicionado y control de la estructura en bancada. TMVL0309Noch keine Bewertungen
- Enfoque práctico de control moderno: Con aplicaciones en MatlabVon EverandEnfoque práctico de control moderno: Con aplicaciones en MatlabBewertung: 5 von 5 Sternen5/5 (1)
- AnexosDokument5 SeitenAnexosjorgeNoch keine Bewertungen
- Ingenieria Del Mantenimiento PDFDokument38 SeitenIngenieria Del Mantenimiento PDFAntonio Dones Lazcano44% (25)
- Pareto - RocaDokument2 SeitenPareto - RocajorgeNoch keine Bewertungen
- 383 1619 1 PB PDFDokument4 Seiten383 1619 1 PB PDFjorgeNoch keine Bewertungen
- Plantilla de Normas Apa Sexta EdicionDokument21 SeitenPlantilla de Normas Apa Sexta EdicionAndrea LaverdeNoch keine Bewertungen
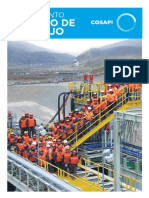
- RIT Cosapi 2014Dokument67 SeitenRIT Cosapi 2014Javier Manuel BarriosNoch keine Bewertungen
- Cuadro de La Literatura Del RenacimientoDokument2 SeitenCuadro de La Literatura Del RenacimientokarihermosaNoch keine Bewertungen
- VcicloDokument6 SeitenVciclojorgeNoch keine Bewertungen
- PartedtDokument17 SeitenPartedtjorgeNoch keine Bewertungen
- ResultadosExamenGeneral 2017 II CaneteuDokument21 SeitenResultadosExamenGeneral 2017 II CaneteujorgeNoch keine Bewertungen
- Pareto - RocaDokument2 SeitenPareto - RocajorgeNoch keine Bewertungen
- Informe Tecnico 5 Impacto 6 Nov 17Dokument2 SeitenInforme Tecnico 5 Impacto 6 Nov 17jorgeNoch keine Bewertungen
- SanoDokument35 SeitenSanojorgeNoch keine Bewertungen
- Result A Doom CallaohDokument52 SeitenResult A Doom CallaohjorgeNoch keine Bewertungen
- EjerciciosDokument19 SeitenEjerciciosjorgeNoch keine Bewertungen
- Reglamento Pract Preprof P2Dokument20 SeitenReglamento Pract Preprof P2jorge100% (1)
- 1bach Textos-3evaluacion PDFDokument21 Seiten1bach Textos-3evaluacion PDFjorgeNoch keine Bewertungen
- Demostracion AnaliticaDokument1 SeiteDemostracion AnaliticajorgeNoch keine Bewertungen
- Problema Del Valor InicialDokument2 SeitenProblema Del Valor InicialJose Luis Cuenca CuencaNoch keine Bewertungen
- Machado Torres, JulioDokument2 SeitenMachado Torres, JuliojorgeNoch keine Bewertungen
- Demostracion AnaliticaDokument1 SeiteDemostracion AnaliticajorgeNoch keine Bewertungen
- Previo de ImpactoDokument3 SeitenPrevio de ImpactojorgeNoch keine Bewertungen
- EjerciciosDokument19 SeitenEjerciciosjorgeNoch keine Bewertungen
- Plan Curricular - Ing. Mecanica UNI FIMDokument3 SeitenPlan Curricular - Ing. Mecanica UNI FIMRubensaiDNoch keine Bewertungen
- Funciones Logicas Todas - Sin TerminarDokument13 SeitenFunciones Logicas Todas - Sin TerminarjorgeNoch keine Bewertungen
- Funciones Logicas BasicasDokument4 SeitenFunciones Logicas BasicasjorgeNoch keine Bewertungen
- Funciones Logicas BasicasDokument4 SeitenFunciones Logicas BasicasjorgeNoch keine Bewertungen
- INSTRUCCIONESDokument1 SeiteINSTRUCCIONESjorgeNoch keine Bewertungen
- OFE Sesión 01 - Interés CompuestoDokument59 SeitenOFE Sesión 01 - Interés CompuestojorgeNoch keine Bewertungen
- Analisis Estatico.Dokument33 SeitenAnalisis Estatico.denniscivNoch keine Bewertungen
- Métodos de Exploración Del SubsueloDokument7 SeitenMétodos de Exploración Del SubsueloIG ClaudiaNoch keine Bewertungen
- Unidad 6 Soluciones QuimicasDokument8 SeitenUnidad 6 Soluciones QuimicasDeyvi ChavezNoch keine Bewertungen
- 11.27, 11.28, 11.53, 11.57, 11.112, 11.115, 11.141, 11.142Dokument47 Seiten11.27, 11.28, 11.53, 11.57, 11.112, 11.115, 11.141, 11.142JORGE GUADALUPE VAZQUEZ FERNANDEZNoch keine Bewertungen
- Coeficientes Losas PDFDokument33 SeitenCoeficientes Losas PDFYalmar Manuel Carrera HuarachaNoch keine Bewertungen
- Maclas 2015Dokument16 SeitenMaclas 2015Becky Merino BordaNoch keine Bewertungen
- Medicion de Fuerza Torsion Potencia en FlechaDokument46 SeitenMedicion de Fuerza Torsion Potencia en FlechahelygiovannyNoch keine Bewertungen
- 1taller Sobre Clarificacion de JugoDokument68 Seiten1taller Sobre Clarificacion de Jugojulio127782343100% (2)
- PM3000 Series - METSEPM3255 PDFDokument3 SeitenPM3000 Series - METSEPM3255 PDFDaniel DesiderioNoch keine Bewertungen
- Trayectorias OrtogonalesDokument4 SeitenTrayectorias OrtogonalesAndrés GuamanquispeNoch keine Bewertungen
- Practica Dirigida de Fiisca III Sobre Fuerza y Campo MagneticoDokument4 SeitenPractica Dirigida de Fiisca III Sobre Fuerza y Campo MagneticoMartin Eduardo Cruz RosalesNoch keine Bewertungen
- Kit Arduino 37 SensoresDokument50 SeitenKit Arduino 37 Sensoresrichard NNoch keine Bewertungen
- Radiación InfrarrojaDokument11 SeitenRadiación InfrarrojaorlandoNoch keine Bewertungen
- Ensayo de Dureza VickersDokument6 SeitenEnsayo de Dureza VickersHARESCOCANoch keine Bewertungen
- AAS Valoracion FarmacopeaDokument10 SeitenAAS Valoracion FarmacopeashudyNoch keine Bewertungen
- Examen Extraordinario 2020 Ciencias Segundo GradoDokument4 SeitenExamen Extraordinario 2020 Ciencias Segundo GradoJuan Manuel SantiagoNoch keine Bewertungen
- Lineas de Energia y Altura PiezometricaDokument28 SeitenLineas de Energia y Altura PiezometricaAnarquia15Noch keine Bewertungen
- Arco de Los Tilos 2Dokument27 SeitenArco de Los Tilos 2Jose DenizNoch keine Bewertungen
- Medidas de DispersiónDokument14 SeitenMedidas de DispersiónRicki HuevosNoch keine Bewertungen
- Libro FermiDokument112 SeitenLibro Fermijnavar44100% (1)
- Problemas de Relatividad GeneralDokument4 SeitenProblemas de Relatividad GeneralJALSNoch keine Bewertungen
- Sintesis de LuminolDokument4 SeitenSintesis de LuminolFran RuizNoch keine Bewertungen
- Cinética de Disolución de Minerales de Cobre deDokument11 SeitenCinética de Disolución de Minerales de Cobre deTacachiri Chocamani JaimeNoch keine Bewertungen
- Crucigrama Fisica IIDokument1 SeiteCrucigrama Fisica IIKevin Molina100% (1)
- Mru y MruvDokument4 SeitenMru y MruvSebastian AlarconNoch keine Bewertungen
- Practica de Fisica Upiicsa Caida LibreDokument8 SeitenPractica de Fisica Upiicsa Caida Libreedgar100% (3)
- Geometría Molecular y Fuerzas IntermolecularesDokument13 SeitenGeometría Molecular y Fuerzas IntermolecularesJosé Velásquez100% (1)
- Determinación de Cloruros en Mantequilla ComercialDokument6 SeitenDeterminación de Cloruros en Mantequilla ComercialAlejandro SanchezNoch keine Bewertungen
- Principios Biomecánicos para OsteosíntesisDokument10 SeitenPrincipios Biomecánicos para OsteosíntesisEsme Rodriguez100% (3)