Das könnte Ihnen auch gefallen
- Accountancy and Business Statistics Second Paper: Management AccountingDokument10 SeitenAccountancy and Business Statistics Second Paper: Management AccountingGuruKPONoch keine Bewertungen
- BM007!3!1 IMT Take Home Exam QuestionDokument2 SeitenBM007!3!1 IMT Take Home Exam QuestionThana JebbrNoch keine Bewertungen
- Task 1 - Market ResearchDokument1 SeiteTask 1 - Market ResearchJohnNoch keine Bewertungen
- GolgotaDokument2 SeitenGolgotaDancinos0% (1)
- MFAG Code - List of Medicines and EquipmentDokument1 SeiteMFAG Code - List of Medicines and EquipmentDancinos100% (1)
- Misconceptions in Physics StudentsDokument6 SeitenMisconceptions in Physics StudentsAnonymous Zk2vW6ylNoch keine Bewertungen
- Laboratory Report On The Constituents of WastewaterDokument15 SeitenLaboratory Report On The Constituents of WastewaterGarfield SmithNoch keine Bewertungen
- Geo Map WorksheetsDokument31 SeitenGeo Map WorksheetsAli DarNoch keine Bewertungen
- Question Sheet: (Net Profit Before Depreciation and After Tax)Dokument11 SeitenQuestion Sheet: (Net Profit Before Depreciation and After Tax)Vinay SemwalNoch keine Bewertungen
- Financial Management (MBOF 912 D) 1Dokument5 SeitenFinancial Management (MBOF 912 D) 1Siva KumarNoch keine Bewertungen
- Case Study CompilationDokument12 SeitenCase Study CompilationanggaNoch keine Bewertungen
- LLM (G&S) 2020 - 38Dokument46 SeitenLLM (G&S) 2020 - 38Shuvro AhsanNoch keine Bewertungen
- Apturja CaseDokument84 SeitenApturja CaseSajin SomanNoch keine Bewertungen
- Director's Personal Liability - Hindrance To Business Decision?Dokument3 SeitenDirector's Personal Liability - Hindrance To Business Decision?ADITYA BANERJEENoch keine Bewertungen
- IMT-01 Dec 09Dokument2 SeitenIMT-01 Dec 09Fin CorpNoch keine Bewertungen
- Imt 15Dokument5 SeitenImt 15pratiksha1091Noch keine Bewertungen
- Question 1-Part A: - Usp Sharing Question 1 - Part BDokument3 SeitenQuestion 1-Part A: - Usp Sharing Question 1 - Part BAstha AgrawalNoch keine Bewertungen
- Business Law: Institute of Management TechnologyDokument5 SeitenBusiness Law: Institute of Management Technologyarun1974Noch keine Bewertungen
- Money and Capital Markets - OverviewDokument16 SeitenMoney and Capital Markets - OverviewSarthak GuptaNoch keine Bewertungen
- Imt 69Dokument4 SeitenImt 69arun1974Noch keine Bewertungen
- IMT CastrolDokument6 SeitenIMT CastrolRahul PandeyNoch keine Bewertungen
- Final Graded Project Submission TemplateDokument11 SeitenFinal Graded Project Submission Templateprithvi rentapalli100% (1)
- Business Economics - Covid 19 Project IMTDokument8 SeitenBusiness Economics - Covid 19 Project IMTsagar sundar dashNoch keine Bewertungen
- IMT Case Study TranscriptionDokument11 SeitenIMT Case Study TranscriptionSai KumarNoch keine Bewertungen
- Imt Ocean ActivityDokument2 SeitenImt Ocean Activitykshitij mundraNoch keine Bewertungen
- Systems Development Life CycleDokument10 SeitenSystems Development Life CycleEth_JagerNoch keine Bewertungen
- NotesDokument11 SeitenNotesSourabhPawadeNoch keine Bewertungen
- Imt 01Dokument29 SeitenImt 01VinayKantNoch keine Bewertungen
- Karandeep - Random MotorDokument10 SeitenKarandeep - Random MotorRishabh TiwariNoch keine Bewertungen
- Group Activity Submission: Ocean ModelDokument2 SeitenGroup Activity Submission: Ocean ModelMANJISTHA MUKHERJEE0% (1)
- Random Motors Project Submission: Name - Debasish PattanaikDokument10 SeitenRandom Motors Project Submission: Name - Debasish PattanaikDebasish PattanaikNoch keine Bewertungen
- !fair and Equitable Treatment (Un)Dokument72 Seiten!fair and Equitable Treatment (Un)Yaroslav Myakotkin100% (1)
- IMT CastrolDokument7 SeitenIMT CastrolSambhav VermaNoch keine Bewertungen
- Digital Business InnovationDokument5 SeitenDigital Business Innovationanju antonyNoch keine Bewertungen
- Chapter 14 Exam Questions - 8th EdDokument11 SeitenChapter 14 Exam Questions - 8th EdUdhbhav Aryan100% (1)
- NotesDokument13 SeitenNotesSourabhPawadeNoch keine Bewertungen
- Thomas and Maine 2019 Market Entry Strategies For Electric Vehicle Start UpsDokument11 SeitenThomas and Maine 2019 Market Entry Strategies For Electric Vehicle Start UpsIoana DiaconescuNoch keine Bewertungen
- Course: Leadership, Engagement, and People Performance Case Study: The Team That Wasn'T Project Submission Template Student Name: YASHVI ROOPLANIDokument4 SeitenCourse: Leadership, Engagement, and People Performance Case Study: The Team That Wasn'T Project Submission Template Student Name: YASHVI ROOPLANIYashvi RooplaniNoch keine Bewertungen
- IMT - COVID19 Love VermaDokument7 SeitenIMT - COVID19 Love Vermalove vermaNoch keine Bewertungen
- Course: Digital Business Innovation Project: Hamley'S Name - Akash SahaDokument9 SeitenCourse: Digital Business Innovation Project: Hamley'S Name - Akash SahaAbhishek SadanandNoch keine Bewertungen
- IMT Covid19Dokument5 SeitenIMT Covid19Proshanjit DeyNoch keine Bewertungen
- Chap 5 - Competitive Rivalry and Competitive Dynamics - Business Strategy - 29111385Dokument5 SeitenChap 5 - Competitive Rivalry and Competitive Dynamics - Business Strategy - 29111385radhi_hirzi0% (1)
- The Friction Caused Between Lisa and Her Team Members Linton and ScovilleDokument8 SeitenThe Friction Caused Between Lisa and Her Team Members Linton and ScovilleMukul JoshiNoch keine Bewertungen
- Name Rajiv Prabhu: Veedol, Valvoline, ShellDokument5 SeitenName Rajiv Prabhu: Veedol, Valvoline, ShellRajivNoch keine Bewertungen
- Muhammed Abdul Varis - Project Submission - LeadershipDokument10 SeitenMuhammed Abdul Varis - Project Submission - LeadershipMuhammed Abdul varisNoch keine Bewertungen
- Assignment 1 Back Bay Battery Simulation Shreya Gupta Final PDFDokument10 SeitenAssignment 1 Back Bay Battery Simulation Shreya Gupta Final PDFAditya MohamadNoch keine Bewertungen
- Outsourcing NotesDokument8 SeitenOutsourcing Notespammy313Noch keine Bewertungen
- Time Warner CableDokument3 SeitenTime Warner CabledebkmuncyNoch keine Bewertungen
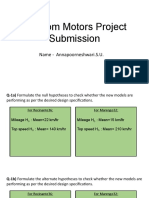
- Random Motors Project Submission: Name - Annapoorneshwari.S.UDokument10 SeitenRandom Motors Project Submission: Name - Annapoorneshwari.S.Uannapoorneshwari suNoch keine Bewertungen
- Case of Managing Demand & Controlling CapacityDokument9 SeitenCase of Managing Demand & Controlling CapacityRaj PatelNoch keine Bewertungen
- Amit Case PresentationDokument13 SeitenAmit Case PresentationAmit PandeyNoch keine Bewertungen
- Hemant Kumar Project Submission Change Management PDFDokument11 SeitenHemant Kumar Project Submission Change Management PDFShashikant SharanNoch keine Bewertungen
- RandomMotorsProject Arjun RajDokument10 SeitenRandomMotorsProject Arjun RajArjun RajNoch keine Bewertungen
- IMT CastrolDokument5 SeitenIMT Castroldeepika srivastavaNoch keine Bewertungen
- Uber Mini ProjectDokument8 SeitenUber Mini Projectfatima ghaffarNoch keine Bewertungen
- Final Exam IMTDokument8 SeitenFinal Exam IMTDeewan MaheshNoch keine Bewertungen
- Assignment 1Dokument4 SeitenAssignment 1gazal doshiNoch keine Bewertungen
- Arab Center For Pharmaceutical and Chemical Industries Co.Dokument20 SeitenArab Center For Pharmaceutical and Chemical Industries Co.Fathi Salem Mohammed AbdullahNoch keine Bewertungen
- IMT CastrolDokument10 SeitenIMT CastrolNishant AroraNoch keine Bewertungen
- DecisionScience ProjectDokument4 SeitenDecisionScience ProjectSandeep SurendranNoch keine Bewertungen
- Mid Term Exam - MBA - Management Accounting - MBAT 202 - OnlineDokument2 SeitenMid Term Exam - MBA - Management Accounting - MBAT 202 - OnlineDullStar MOTONoch keine Bewertungen
- Petrosi: Petrophysical Seismic Inversion For More Accurate and Precise Reservoir PropertiesDokument5 SeitenPetrosi: Petrophysical Seismic Inversion For More Accurate and Precise Reservoir PropertiesXiaoze JinNoch keine Bewertungen
- Hydro-Informatics Methods For Groundwater Simulation-Nastaran ZamaniDokument13 SeitenHydro-Informatics Methods For Groundwater Simulation-Nastaran Zamanicopdeposu2071Noch keine Bewertungen
- Numerical Study of Dam-Break Flow - Omid SeyedashrafDokument9 SeitenNumerical Study of Dam-Break Flow - Omid SeyedashrafseyedashrafNoch keine Bewertungen
- Garbage Management ManualDokument28 SeitenGarbage Management ManualDancinosNoch keine Bewertungen
- Contact Addresses For OIL RIGSDokument47 SeitenContact Addresses For OIL RIGSDancinos100% (1)
- Contact Addresses For OIL RIGSDokument47 SeitenContact Addresses For OIL RIGSDancinos100% (1)
- Trimethylamine Oxide in Marine Products: J.S.C.I.Dokument7 SeitenTrimethylamine Oxide in Marine Products: J.S.C.I.Veneta GizdakovaNoch keine Bewertungen
- Exam3 Problems SolDokument36 SeitenExam3 Problems Solnancy maganaNoch keine Bewertungen
- Co (NH3) 6Dokument1 SeiteCo (NH3) 6Ayotunde OnasanyaNoch keine Bewertungen
- Possible Hazards and Contributing Factors Associated With Medical Devices (ISO 14971:2000, Annex D)Dokument3 SeitenPossible Hazards and Contributing Factors Associated With Medical Devices (ISO 14971:2000, Annex D)hamed IranpourNoch keine Bewertungen
- Physical Chemistry MCQS Question BankDokument5 SeitenPhysical Chemistry MCQS Question BankMUHAMMAD JUNAID0% (2)
- Docking IntroductionDokument17 SeitenDocking IntroductionPrasath KumarNoch keine Bewertungen
- Applications OF Multiple Intelligences Theory To Chemistry Teaching and LearningDokument14 SeitenApplications OF Multiple Intelligences Theory To Chemistry Teaching and LearningFarida CholiqNoch keine Bewertungen
- Applsci 12 10040 v2Dokument11 SeitenApplsci 12 10040 v2Juan VelasquezNoch keine Bewertungen
- HydranauticsDokument17 SeitenHydranauticsNafian AwaludinNoch keine Bewertungen
- DC MotorsDokument8 SeitenDC MotorsgireeshNoch keine Bewertungen
- Work Power Energy PDFDokument38 SeitenWork Power Energy PDFKrizzi Dizon GarciaNoch keine Bewertungen
- Tabela Periódica Com Valores de NoxDokument1 SeiteTabela Periódica Com Valores de NoxSamuel ChiezaNoch keine Bewertungen
- MCQ'S Material PhysicsDokument8 SeitenMCQ'S Material PhysicsLaiba IqbalNoch keine Bewertungen
- Body Electrical Diagnosis: Quick Training Guide - QT611ADokument10 SeitenBody Electrical Diagnosis: Quick Training Guide - QT611AThang TongNoch keine Bewertungen
- Micro EncapsulationDokument43 SeitenMicro Encapsulationkvyadav100% (2)
- Class 12Dokument9 SeitenClass 12Kumar BrotherNoch keine Bewertungen
- Metrohm CatalogDokument40 SeitenMetrohm Catalogsalpta33% (3)
- Chapter 2 EnergyDokument6 SeitenChapter 2 EnergyJaishree RamNoch keine Bewertungen
- How Is The Efficiency of Solar Panels Affected by The P-Type and N-Type Carrier Concentration in Semiconductors?Dokument5 SeitenHow Is The Efficiency of Solar Panels Affected by The P-Type and N-Type Carrier Concentration in Semiconductors?International Journal of Innovative Science and Research Technology100% (1)
- Solubility of Water in Hydrocarbons - Hibbard & SchallaDokument27 SeitenSolubility of Water in Hydrocarbons - Hibbard & SchallarschirtNoch keine Bewertungen
- Laboratory Report #2: Constant Acceleration in Linear MotionDokument7 SeitenLaboratory Report #2: Constant Acceleration in Linear MotionAndrea RioNoch keine Bewertungen
- Makerere University: Faculty of TechnologyDokument70 SeitenMakerere University: Faculty of TechnologyIvan MasubaNoch keine Bewertungen
- ABB-733-WPO Understanding Coriolis Mass FlowmeterDokument3 SeitenABB-733-WPO Understanding Coriolis Mass FlowmetercarlosmandopintoNoch keine Bewertungen
- Bioreactor Design For Enhanced Carrier-Assisted Surfactin Production With Bacillus Subtilis Yeh2006Dokument7 SeitenBioreactor Design For Enhanced Carrier-Assisted Surfactin Production With Bacillus Subtilis Yeh2006Ingeniería QuímicaNoch keine Bewertungen
- Frequently Asked Questions: GeneralDokument12 SeitenFrequently Asked Questions: GeneralChoice OrganoNoch keine Bewertungen
- Weekly Learning PlanDokument5 SeitenWeekly Learning PlanRjane CañeteNoch keine Bewertungen
- MSDS Boric Ecid Etimaden TurkeyDokument14 SeitenMSDS Boric Ecid Etimaden TurkeyalkanfilesalesNoch keine Bewertungen