Das könnte Ihnen auch gefallen
- Arm MicrocontrollerDokument17 SeitenArm MicrocontrollerIragoudaNoch keine Bewertungen
- Código InversorDokument11 SeitenCódigo InversorLucas LucasNoch keine Bewertungen
- CED19I032Dokument12 SeitenCED19I032Pranavram VNoch keine Bewertungen
- CED19I032Dokument13 SeitenCED19I032Pranavram VNoch keine Bewertungen
- PID Control MAX6675 Thermocouple Arduino Schematic With Rotary EncoderDokument13 SeitenPID Control MAX6675 Thermocouple Arduino Schematic With Rotary EncoderStewin Perez100% (1)
- HBridgeMotorControl With PICDokument11 SeitenHBridgeMotorControl With PICcoceicr100% (3)
- Servo Motor Control by Using Microcontroller PIC16F877ADokument12 SeitenServo Motor Control by Using Microcontroller PIC16F877Aeeindustrial100% (1)
- Experiment 4 Stepper Motor Control With Systick Timer: 1 ObjectivesDokument5 SeitenExperiment 4 Stepper Motor Control With Systick Timer: 1 ObjectivesEVD18I001 A BALAVIGNESHNoch keine Bewertungen
- AGV ProgramDokument12 SeitenAGV ProgramGanang Saputro100% (1)
- Three-Phase Motor Control With STM32F401RET6U: B L D CDokument34 SeitenThree-Phase Motor Control With STM32F401RET6U: B L D Cbokic88Noch keine Bewertungen
- Griet DSP ProgramsDokument14 SeitenGriet DSP ProgramsJaipaul CheernamNoch keine Bewertungen
- Conv AdcDokument2 SeitenConv AdcDulceNoch keine Bewertungen
- BAseDokument5 SeitenBAseJhon PerezNoch keine Bewertungen
- By Gromain59Dokument5 SeitenBy Gromain59MarcoBFNoch keine Bewertungen
- EDM18B010 - Expt4-Embedded System Design PracticeDokument9 SeitenEDM18B010 - Expt4-Embedded System Design PracticeCHIRAG C M CHIRAG C MNoch keine Bewertungen
- Ee 222 CepDokument10 SeitenEe 222 CepObed AhmadNoch keine Bewertungen
- PidDokument7 SeitenPidEmilio Arrieta GallardoNoch keine Bewertungen
- Arm Programs GpioDokument15 SeitenArm Programs GpioA.n. Mukunda RaoNoch keine Bewertungen
- Embedded SystemsDokument12 SeitenEmbedded SystemsAl-Amin BhuiyanNoch keine Bewertungen
- 14 WeatherDokument11 Seiten14 WeatherNika KobaidzeNoch keine Bewertungen
- PWM Speed & Direction Control of DC Motor: ObjectiveDokument6 SeitenPWM Speed & Direction Control of DC Motor: Objectivevipulkondekar100% (1)
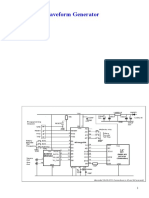
- AD9850 Waveform GeneratorDokument9 SeitenAD9850 Waveform GeneratorDemixManNoch keine Bewertungen
- Listing Program Frekuensi SamplingDokument6 SeitenListing Program Frekuensi SamplingNurul AzizahNoch keine Bewertungen
- Program ESC 2019Dokument8 SeitenProgram ESC 2019Aris100% (1)
- Development Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Dokument13 SeitenDevelopment Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Thông NguyễnNoch keine Bewertungen
- Mitac 1766PDDokument66 SeitenMitac 1766PDsebulba1234Noch keine Bewertungen
- DC Motor Bidirectional Speed Control Using PWM PDFDokument5 SeitenDC Motor Bidirectional Speed Control Using PWM PDFM Rameez Ur Rehman100% (1)
- SPWM InverterwdDokument4 SeitenSPWM InverterwdAnonymous Kti5jq5EJINoch keine Bewertungen
- USBto RS232 AsmDokument34 SeitenUSBto RS232 AsmBoBaHNoch keine Bewertungen
- PIC18F4550 PWM - PIC ControllersDokument7 SeitenPIC18F4550 PWM - PIC ControllersKrishanu Modak100% (2)
- BLDC MainDokument24 SeitenBLDC MainGeralt VesemirNoch keine Bewertungen
- G14 A03 ReportDokument4 SeitenG14 A03 Reportpranay kamal kamalNoch keine Bewertungen
- PID Position Control Dspic 30f2020Dokument4 SeitenPID Position Control Dspic 30f2020FREEDOMHOUSE100% (3)
- Lec 5Dokument18 SeitenLec 5Saad ShaikhNoch keine Bewertungen
- 8x8x8 CodeDokument7 Seiten8x8x8 CodeBalu BhoviNoch keine Bewertungen
- Lab 13Dokument11 SeitenLab 13ubaidNoch keine Bewertungen
- PWM CDokument2 SeitenPWM CMore FunNoch keine Bewertungen
- PIC18 Pulse Width ModulationDokument16 SeitenPIC18 Pulse Width ModulationAnoj Pahathkumbura100% (1)
- Uc3842 Monitor Power Supply Regulator IcDokument7 SeitenUc3842 Monitor Power Supply Regulator IcJoseph Sidhom SnadaNoch keine Bewertungen
- Cheatsheet SuPDokument9 SeitenCheatsheet SuPoana natarauNoch keine Bewertungen
- 02 PIDcontroller PDFDokument5 Seiten02 PIDcontroller PDFZugravu AndreiNoch keine Bewertungen
- Steps Involved in LPC2148Dokument8 SeitenSteps Involved in LPC2148Ravi RajanNoch keine Bewertungen
- PIC Power SupplyDokument0 SeitenPIC Power Supplyaqdus100% (1)
- Arm7 ExamplesDokument16 SeitenArm7 ExamplescontrasterNoch keine Bewertungen
- Sony Sirc ProtocolDokument10 SeitenSony Sirc ProtocolFrancisco HernandezNoch keine Bewertungen
- Invertor, Control Setting ValueDokument12 SeitenInvertor, Control Setting ValueRey-an A. MorenoNoch keine Bewertungen
- HS8108Dokument8 SeitenHS8108Miloš ZorićNoch keine Bewertungen
- Rtes L 7-9Dokument4 SeitenRtes L 7-9Xyed Haider BukhariNoch keine Bewertungen
- Lab05 ADCDokument23 SeitenLab05 ADCChoco LocoNoch keine Bewertungen
- ARM Embedded Controller ManualDokument28 SeitenARM Embedded Controller ManualGagan NaiduNoch keine Bewertungen
- LS7290 Stepper Motor ControlDokument12 SeitenLS7290 Stepper Motor ControlOlger NavarroNoch keine Bewertungen
- NXP LPC2148, GPIO, Int, USART, ADC PDFDokument118 SeitenNXP LPC2148, GPIO, Int, USART, ADC PDFBibinshaNoch keine Bewertungen
- Arduino Arpeggiator CodeDokument38 SeitenArduino Arpeggiator CodeAdrianoEngelNoch keine Bewertungen
- LB1824 PowerBrushlessMotorDriverDokument10 SeitenLB1824 PowerBrushlessMotorDriverwhynot05Noch keine Bewertungen
- Expand Port ArduinoDokument8 SeitenExpand Port Arduino5tificoNoch keine Bewertungen
- ECN3021Dokument10 SeitenECN3021Wasang Juwi PracihnoNoch keine Bewertungen
- Motor Driver For CD-ROMsDokument10 SeitenMotor Driver For CD-ROMscostpopNoch keine Bewertungen
- Rtos Course ProjectDokument20 SeitenRtos Course Projecthammad choudharyNoch keine Bewertungen
- GSM Based Home AutomationDokument80 SeitenGSM Based Home AutomationShashi Kant SainiNoch keine Bewertungen
- Icom IC-F5400D OpS MAnDokument189 SeitenIcom IC-F5400D OpS MAnMikeNoch keine Bewertungen
- Denon Avr-1908 788 ServiceDokument260 SeitenDenon Avr-1908 788 ServiceClaudio Hector Arrosa100% (1)
- Current Reference Bandgap PDFDokument4 SeitenCurrent Reference Bandgap PDFKumar GaneshNoch keine Bewertungen
- Homework 1 EE 240b Advanced Analog CircuitsDokument2 SeitenHomework 1 EE 240b Advanced Analog Circuitsb98154Noch keine Bewertungen
- DTB113ZKT146 PDFDokument6 SeitenDTB113ZKT146 PDFshezad shezadNoch keine Bewertungen
- ECE102 - F12 LecSet 8 PDFDokument59 SeitenECE102 - F12 LecSet 8 PDFEce RljitNoch keine Bewertungen
- Basic Circuit of Op-Amp: KNJ2463 Mohd Syahmi JamaludinDokument18 SeitenBasic Circuit of Op-Amp: KNJ2463 Mohd Syahmi JamaludinPetrus Petz WtzNoch keine Bewertungen
- Project Proposal: "Revolutionary Solutions For in Building Coverage Solution & Implementation of The Same"Dokument4 SeitenProject Proposal: "Revolutionary Solutions For in Building Coverage Solution & Implementation of The Same"Viraaj ShahNoch keine Bewertungen
- Adf4110 4111 4112 4113Dokument28 SeitenAdf4110 4111 4112 4113condejhonnyNoch keine Bewertungen
- CounterDokument11 SeitenCounterDatpmNoch keine Bewertungen
- Inserting Turbo Code Technology Into The DVB Satellite Broadcasting SystemDokument20 SeitenInserting Turbo Code Technology Into The DVB Satellite Broadcasting SystemAirCanada SkiNoch keine Bewertungen
- GENEX U-Net V300R005 Product Description (LTE) V1.0 (20090804)Dokument17 SeitenGENEX U-Net V300R005 Product Description (LTE) V1.0 (20090804)Yaser AhmedNoch keine Bewertungen
- Cleaning The EOS 5D MKII ViewfinderDokument21 SeitenCleaning The EOS 5D MKII Viewfinderdeep42Noch keine Bewertungen
- Voxtel R200/R210/R220: User GuideDokument140 SeitenVoxtel R200/R210/R220: User GuideYasinImamNoch keine Bewertungen
- CMOS 1.8 V to 5.5 V, 2.5 Ω SPDT Switch/2:1 Mux in Tiny SC70 Package ADG779Dokument13 SeitenCMOS 1.8 V to 5.5 V, 2.5 Ω SPDT Switch/2:1 Mux in Tiny SC70 Package ADG779d&Noch keine Bewertungen
- Navedtra 14088Dokument214 SeitenNavedtra 14088gotlove7100% (1)
- Manual Leviton-HCPRF All Code ReceiverDokument2 SeitenManual Leviton-HCPRF All Code ReceiverBenjamin DoverNoch keine Bewertungen
- Advanced Electronics 3 - ComfortDokument195 SeitenAdvanced Electronics 3 - Comfortaiigee100% (7)
- Voyager KA500 User Manual-REV 6-22-08Dokument28 SeitenVoyager KA500 User Manual-REV 6-22-0821st-Century-Goods.com100% (2)
- Pulse Width Modulator Control Circuits: Semiconductor Technical DataDokument8 SeitenPulse Width Modulator Control Circuits: Semiconductor Technical DataMaxNoch keine Bewertungen
- Kenwood KRC 288 Service ManualDokument19 SeitenKenwood KRC 288 Service ManualmaxNoch keine Bewertungen
- AD7710Dokument32 SeitenAD7710Daniel PalaciosNoch keine Bewertungen
- Cardiovit At-1: Bet On This 3-Channel ECG by Schiller!Dokument2 SeitenCardiovit At-1: Bet On This 3-Channel ECG by Schiller!David Henao GonzalezNoch keine Bewertungen
- GM Manual PDFDokument18 SeitenGM Manual PDFalmircelebicNoch keine Bewertungen
- ADS-B Introduction / TutorialDokument61 SeitenADS-B Introduction / Tutorialtracon90075% (4)
- For SHOWERS and Water SupplyDokument2 SeitenFor SHOWERS and Water SupplyDaniel TavaresNoch keine Bewertungen
- Mobile PIFA AntennaDokument27 SeitenMobile PIFA Antennaabhi12567Noch keine Bewertungen
- Low Voltage Capacitor and Filters - Cooper IndustriesDokument6 SeitenLow Voltage Capacitor and Filters - Cooper IndustriesDallie Kurniawan100% (1)
- Miller TheoremDokument5 SeitenMiller TheoremSiddhant Jain0% (1)