Das könnte Ihnen auch gefallen
- Crystal Design Structure and Function Perspectives in Supra Molecular Chemistry Volume 7 - GAUTAM R. DESIRAJUDokument418 SeitenCrystal Design Structure and Function Perspectives in Supra Molecular Chemistry Volume 7 - GAUTAM R. DESIRAJUMinea Maria-ramonaNoch keine Bewertungen
- Resonant Cavity Feynman - Vii-23-Cavities PDFDokument11 SeitenResonant Cavity Feynman - Vii-23-Cavities PDFVaibhav ChaudharyNoch keine Bewertungen
- Social InvestorsDokument6 SeitenSocial InvestorsVaibhav ChaudharyNoch keine Bewertungen
- Resonant Cavity Feynman - Vii-23-Cavities PDFDokument11 SeitenResonant Cavity Feynman - Vii-23-Cavities PDFVaibhav ChaudharyNoch keine Bewertungen
- Product Datasheet en CF1200-BDokument4 SeitenProduct Datasheet en CF1200-BVaibhav ChaudharyNoch keine Bewertungen
- Johansson Et Al - Self-Organizing Flow Technology - in Viktor Schauberger's Footsteps (2002)Dokument50 SeitenJohansson Et Al - Self-Organizing Flow Technology - in Viktor Schauberger's Footsteps (2002)kury100% (5)
- Ice Melting DynamicsDokument7 SeitenIce Melting DynamicsVaibhav ChaudharyNoch keine Bewertungen
- Vimana Flying Machine of The AncientsDokument320 SeitenVimana Flying Machine of The AncientsVasile Tripon100% (2)
- Jones 2019Dokument14 SeitenJones 2019Vaibhav ChaudharyNoch keine Bewertungen
- Technologies Cost Analysis-CspDokument48 SeitenTechnologies Cost Analysis-CspJoao Carlos DrumondNoch keine Bewertungen
- Solar Thermal Concentrator Tech-2015Dokument17 SeitenSolar Thermal Concentrator Tech-2015Vaibhav ChaudharyNoch keine Bewertungen
- A Fresnel Paraboloid Concentrator With Cavity Receiver For Industrial Process HeatDokument3 SeitenA Fresnel Paraboloid Concentrator With Cavity Receiver For Industrial Process HeatVaibhav ChaudharyNoch keine Bewertungen
- Sample - Autonomous Last Mile Delivery MarketDokument17 SeitenSample - Autonomous Last Mile Delivery MarketVaibhav ChaudharyNoch keine Bewertungen
- 2017 - Very Good Review PDFDokument23 Seiten2017 - Very Good Review PDFVaibhav ChaudharyNoch keine Bewertungen
- h2 O2 ProductionDokument9 Seitenh2 O2 ProductionVaibhav ChaudharyNoch keine Bewertungen
- Prakash 2015Dokument25 SeitenPrakash 2015Vaibhav ChaudharyNoch keine Bewertungen
- Air Disc BrakesDokument4 SeitenAir Disc BrakesArijeet Sen0% (1)
- Desalination Heat Transfer Equation, EntropyDokument14 SeitenDesalination Heat Transfer Equation, EntropyVaibhav ChaudharyNoch keine Bewertungen
- Fresnel Lens Catalogue - Rudra SolarDokument2 SeitenFresnel Lens Catalogue - Rudra SolarVaibhav ChaudharyNoch keine Bewertungen
- Energies 10 01314 v2Dokument20 SeitenEnergies 10 01314 v2oishiimomoNoch keine Bewertungen
- Co Founder Entrepreneur Question ListDokument3 SeitenCo Founder Entrepreneur Question ListVaibhav ChaudharyNoch keine Bewertungen
- How to download and activate Adobe Acrobat Pro 11Dokument1 SeiteHow to download and activate Adobe Acrobat Pro 11solquihaNoch keine Bewertungen
- Needle Roller Bearings With Machined Rings With An Inner Ring-NKI 17/20Dokument1 SeiteNeedle Roller Bearings With Machined Rings With An Inner Ring-NKI 17/20Vaibhav ChaudharyNoch keine Bewertungen
- System Design PresentationenDokument14 SeitenSystem Design PresentationenVaibhav ChaudharyNoch keine Bewertungen
- How to download and activate Adobe Acrobat Pro 11Dokument1 SeiteHow to download and activate Adobe Acrobat Pro 11solquihaNoch keine Bewertungen
- Alcoa Recoil CatalogDokument68 SeitenAlcoa Recoil CatalogVaibhav ChaudharyNoch keine Bewertungen
- Loctite 222MS™: Product DescriptionDokument3 SeitenLoctite 222MS™: Product DescriptionVaibhav ChaudharyNoch keine Bewertungen
- Oint Ssembly Hecklist: Item Normal Reverse CommentDokument1 SeiteOint Ssembly Hecklist: Item Normal Reverse CommentVaibhav ChaudharyNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Register A Transport Company in KenyaDokument16 SeitenRegister A Transport Company in KenyaSamsonNoch keine Bewertungen
- 7 Star Global Airlines Limited: Aircraft Technical LogDokument1 Seite7 Star Global Airlines Limited: Aircraft Technical LogJudeNoch keine Bewertungen
- WE3B0018101 Three Wheel PalmDokument70 SeitenWE3B0018101 Three Wheel PalmPrita ShofiNoch keine Bewertungen
- Tesla Vehicle Fire NhtsaDokument3 SeitenTesla Vehicle Fire NhtsaSimon AlvarezNoch keine Bewertungen
- Travel Reimbursement FormDokument1 SeiteTravel Reimbursement FormYogesh RathiNoch keine Bewertungen
- A Survey of Passengers Satisfaction On Service Quality of APSRTC: The Case of Prakasam District, A.PDokument5 SeitenA Survey of Passengers Satisfaction On Service Quality of APSRTC: The Case of Prakasam District, A.PEditor IJTSRDNoch keine Bewertungen
- 4s Re Compact Bs4 SPCDokument89 Seiten4s Re Compact Bs4 SPCjai aroraNoch keine Bewertungen
- JLG g10 43a Telehandler Parts ManualDokument20 SeitenJLG g10 43a Telehandler Parts Manualmelvin98% (52)
- Grove TMS800E PDFDokument36 SeitenGrove TMS800E PDFGILMAR NIETONoch keine Bewertungen
- Vertical CirculationDokument24 SeitenVertical CirculationMahdy ziyadNoch keine Bewertungen
- Frictional Interaction Tyre&pavem - STP793Dokument343 SeitenFrictional Interaction Tyre&pavem - STP793Sri RamyaNoch keine Bewertungen
- Volvo 9700 SpecificationsDokument3 SeitenVolvo 9700 SpecificationsAndreiMaresNoch keine Bewertungen
- TESLA International Business Strategies PresentationDokument24 SeitenTESLA International Business Strategies PresentationSasha SashaNoch keine Bewertungen
- SY60C - 2PAGE Small NomarkupDokument2 SeitenSY60C - 2PAGE Small NomarkupJaylogeshwar MDNoch keine Bewertungen
- Inquiry of Sir Frank All Suspension Part NumbersDokument5 SeitenInquiry of Sir Frank All Suspension Part NumbersJonel BuenaventuraNoch keine Bewertungen
- Container Loading Ex 2 ProductsDokument2 SeitenContainer Loading Ex 2 ProductsraghavNoch keine Bewertungen
- Conect OresDokument138 SeitenConect OresRZ EmiNoch keine Bewertungen
- TRANSPORTATION LAW QUIZ REVIEWDokument10 SeitenTRANSPORTATION LAW QUIZ REVIEWAbigael SeverinoNoch keine Bewertungen
- Ecm 3Dokument1 SeiteEcm 3Enrique Arevalo LeyvaNoch keine Bewertungen
- Santiago Sena Final2-1Dokument83 SeitenSantiago Sena Final2-1lacan021Noch keine Bewertungen
- Dholera Smart CityDokument9 SeitenDholera Smart CitySantoshNoch keine Bewertungen
- 7 The India Moped Market - Case 2021Dokument4 Seiten7 The India Moped Market - Case 2021KrishnaKhandelwalNoch keine Bewertungen
- Resume of Skillpin2Dokument2 SeitenResume of Skillpin2api-23406439Noch keine Bewertungen
- Uber's Global Expansion and Product Diversification Drive Revenue GrowthDokument17 SeitenUber's Global Expansion and Product Diversification Drive Revenue Growthteja reddyNoch keine Bewertungen
- Acg002-Transportation and Assignment ModelsDokument36 SeitenAcg002-Transportation and Assignment ModelsAlvin ViajeNoch keine Bewertungen
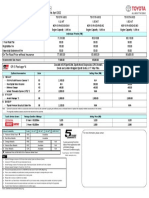
- 1.0 PM (IPte) Toyota Vios Estimated Price ListDokument1 Seite1.0 PM (IPte) Toyota Vios Estimated Price ListJoie ConceptNoch keine Bewertungen
- FinalPaper Acher Thomas Will ChristianDokument8 SeitenFinalPaper Acher Thomas Will Christianaxel50093Noch keine Bewertungen
- Chapter 4Dokument28 SeitenChapter 4singhconstNoch keine Bewertungen
- Gerry's Dnata & Q Airways 2021Dokument69 SeitenGerry's Dnata & Q Airways 2021Muhammad OwaisNoch keine Bewertungen
- Answers To The Problems of Traffic CongestionDokument7 SeitenAnswers To The Problems of Traffic CongestionNgọc Hoàng Thị BảoNoch keine Bewertungen