Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Solutions To Irodov's Problems - Volume IIDokument442 SeitenSolutions To Irodov's Problems - Volume IIZequinha de Abreu100% (2)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Army Interrogation ApproachesDokument31 SeitenArmy Interrogation ApproachesSpace_Hulker100% (3)
- Zarlino-On The ModesDokument150 SeitenZarlino-On The ModesPartituraDireccion100% (1)
- Cec 103. - Workshop Technology 1Dokument128 SeitenCec 103. - Workshop Technology 1VietHungCao92% (13)
- PDS OperatorStationDokument7 SeitenPDS OperatorStationMisael Castillo CamachoNoch keine Bewertungen
- Elementary Differential EquationsDokument664 SeitenElementary Differential EquationsAl FanNoch keine Bewertungen
- A Review of Water Hammer Theory and PracticeDokument28 SeitenA Review of Water Hammer Theory and Practicejulio49Noch keine Bewertungen
- Bellin, E. H. (1984) - The Psychoanalytic Narrative On The Transformational Axis Between Writing and SpeechDokument15 SeitenBellin, E. H. (1984) - The Psychoanalytic Narrative On The Transformational Axis Between Writing and SpeechofanimenochNoch keine Bewertungen
- Tunnel DamperDokument8 SeitenTunnel DamperIvanNoch keine Bewertungen
- Fal Rifle Manual FinalDokument24 SeitenFal Rifle Manual FinalAsterog VigerNoch keine Bewertungen
- Methods For Assessing The Stability of Slopes During Earthquakes-A Retrospective 1Dokument3 SeitenMethods For Assessing The Stability of Slopes During Earthquakes-A Retrospective 1ilijarskNoch keine Bewertungen
- prEN378-1 2014Dokument64 SeitenprEN378-1 2014Peter MuellerNoch keine Bewertungen
- Planing Vessel LectureDokument11 SeitenPlaning Vessel Lecturekim lawNoch keine Bewertungen
- Nādatanumanisham Shankaram Namami Me Manasa ShirasaDokument12 SeitenNādatanumanisham Shankaram Namami Me Manasa Shirasaveena murthyNoch keine Bewertungen
- Curtis CatalogDokument9 SeitenCurtis CatalogtharngalNoch keine Bewertungen
- Operational Guidelines For VlsfoDokument2 SeitenOperational Guidelines For VlsfoИгорьNoch keine Bewertungen
- Snow Melting PDFDokument21 SeitenSnow Melting PDFPeter MuellerNoch keine Bewertungen
- 42 SaprintsDokument22 Seiten42 SaprintsPeter MuellerNoch keine Bewertungen
- Power Spectral Density UnitsDokument8 SeitenPower Spectral Density UnitsEduardo GonnelliNoch keine Bewertungen
- GDC13 Quaternions FinalDokument69 SeitenGDC13 Quaternions Finalricky.pigazziniNoch keine Bewertungen
- A Do Mian 201000101004Dokument10 SeitenA Do Mian 201000101004Peter MuellerNoch keine Bewertungen
- GeorgiAmmaSchultz RecognizingHandAndFingerGesturesWithIMUBasedMotionAndEMGBasedMuscleActivitySensingDokument10 SeitenGeorgiAmmaSchultz RecognizingHandAndFingerGesturesWithIMUBasedMotionAndEMGBasedMuscleActivitySensingPeter MuellerNoch keine Bewertungen
- Adomian 1113Dokument4 SeitenAdomian 1113Peter MuellerNoch keine Bewertungen
- Section 3.6 BookDokument6 SeitenSection 3.6 Bookdrdoak123Noch keine Bewertungen
- Adomian 6AB4Fd01Dokument17 SeitenAdomian 6AB4Fd01Peter MuellerNoch keine Bewertungen
- EMFT BookDokument203 SeitenEMFT Booksankalani2003Noch keine Bewertungen
- Application of Method of Characterstics in Water HammerDokument12 SeitenApplication of Method of Characterstics in Water HammergouthiNoch keine Bewertungen
- c1Dokument19 Seitenc1vgnagaNoch keine Bewertungen
- L02-EIP Module User ManualDokument37 SeitenL02-EIP Module User ManualSergio Mauricio Acuña BravoNoch keine Bewertungen
- F 2786538d6cdc0bb1Dokument245 SeitenF 2786538d6cdc0bb1Daniel HarutyunyanNoch keine Bewertungen
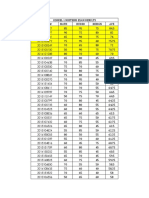
- Midterm Exam Result Ce199-1l 2Q1920Dokument3 SeitenMidterm Exam Result Ce199-1l 2Q1920RA CarpioNoch keine Bewertungen
- Regeln Map 2Dokument2 SeitenRegeln Map 2bruno.wetzelNoch keine Bewertungen
- © Ncert Not To Be Republished: AlgebraDokument12 Seiten© Ncert Not To Be Republished: Algebrakritagyasharma29Noch keine Bewertungen
- ID Pengaruh Persistensi Laba Alokasi Pajak Antar Periode Ukuran Perusahaan PertumbuDokument21 SeitenID Pengaruh Persistensi Laba Alokasi Pajak Antar Periode Ukuran Perusahaan PertumbuGheaMarisyaPuteriNoch keine Bewertungen
- Lecture 1: Encoding Language: LING 1330/2330: Introduction To Computational Linguistics Na-Rae HanDokument18 SeitenLecture 1: Encoding Language: LING 1330/2330: Introduction To Computational Linguistics Na-Rae HanLaura AmwayiNoch keine Bewertungen
- Database Classification TypesDokument10 SeitenDatabase Classification TypesBhiea Mische MatilacNoch keine Bewertungen
- Recommended Procedures For Internet-Based Connections Between Rths and Nmcs (VPN, Ipsec)Dokument38 SeitenRecommended Procedures For Internet-Based Connections Between Rths and Nmcs (VPN, Ipsec)Crismaruc Maria-madalinaNoch keine Bewertungen
- UnderstandingCryptology CoreConcepts 6-2-2013Dokument128 SeitenUnderstandingCryptology CoreConcepts 6-2-2013zenzei_Noch keine Bewertungen
- Development of A Highway Performance Index For Upgrading Decision Making - Case Study For A Provincial Road Network in A Developing CountryDokument6 SeitenDevelopment of A Highway Performance Index For Upgrading Decision Making - Case Study For A Provincial Road Network in A Developing CountryAshen MinolNoch keine Bewertungen
- Line and Circle Drawing AlgorithmsDokument57 SeitenLine and Circle Drawing AlgorithmsMILAN K JAIN B.Tech CSE B 2018-2022Noch keine Bewertungen
- DasibiOzoneMonitorManual 1008Dokument183 SeitenDasibiOzoneMonitorManual 1008api-26966403100% (2)
- Spesifikasi ACER Travelmate P2-P245Dokument12 SeitenSpesifikasi ACER Travelmate P2-P245Sebastian Fykri AlmuktiNoch keine Bewertungen
- DbintfcDokument80 SeitenDbintfchnr.uninstallNoch keine Bewertungen
- Haidarali-MR-2011-PhD-Thesis 01 PDFDokument378 SeitenHaidarali-MR-2011-PhD-Thesis 01 PDFIbrahim KhanNoch keine Bewertungen
- VRV A 12 PDFDokument1 SeiteVRV A 12 PDFMoe Thiri ZunNoch keine Bewertungen
- PF-CIS-Fall 2022 LABDokument4 SeitenPF-CIS-Fall 2022 LABMuhammad FaisalNoch keine Bewertungen
- Delta VFD E Series User ManualDokument399 SeitenDelta VFD E Series User ManualTendai AlfaceNoch keine Bewertungen