Das könnte Ihnen auch gefallen
- Wind Turbine Seismic Load Analysis Based On Numerical CalculationDokument10 SeitenWind Turbine Seismic Load Analysis Based On Numerical CalculationYasin ÖzenNoch keine Bewertungen
- Ain Shams Engineering Journal: Sam Austin, Sukhvarsh JerathDokument9 SeitenAin Shams Engineering Journal: Sam Austin, Sukhvarsh JerathLhester NavascaNoch keine Bewertungen
- Time History Analysis in Case of A Wind Turbine: Cerasela-Panseluţa Olariu and Mihaela MovilăDokument10 SeitenTime History Analysis in Case of A Wind Turbine: Cerasela-Panseluţa Olariu and Mihaela MovilădanaciuteaNoch keine Bewertungen
- Research Article: Seismic Response and Safety Assessment of An Existing Concrete Chimney Under Wind LoadDokument13 SeitenResearch Article: Seismic Response and Safety Assessment of An Existing Concrete Chimney Under Wind Loadsaeedeh koohestaniNoch keine Bewertungen
- Engineering Structures: Atul Patil, Sungmoon Jung, Oh-Sung KwonDokument11 SeitenEngineering Structures: Atul Patil, Sungmoon Jung, Oh-Sung KwonSADULLAHNoch keine Bewertungen
- Evaluation of Offshore Wind Turbine Tower Dynamics PDFDokument11 SeitenEvaluation of Offshore Wind Turbine Tower Dynamics PDFAmal SalhiNoch keine Bewertungen
- Structural Response of Lattice Steel Masts For Seismic LoadingDokument7 SeitenStructural Response of Lattice Steel Masts For Seismic LoadingKamiran MuhammadNoch keine Bewertungen
- Fatigue Analysis of Offshore Wind TurbinDokument18 SeitenFatigue Analysis of Offshore Wind TurbinDao Ba ThanhNoch keine Bewertungen
- Engineering Structures: Gholamreza Amirinia, Sungmoon JungDokument14 SeitenEngineering Structures: Gholamreza Amirinia, Sungmoon JungSADULLAHNoch keine Bewertungen
- Martinez Vazquez2016WinddesignspectraDokument12 SeitenMartinez Vazquez2016WinddesignspectraAmerico TorchNoch keine Bewertungen
- Experimental and Theoretical Study of Wind Loads and Mechanical Performance Analysis of HeliostatsDokument10 SeitenExperimental and Theoretical Study of Wind Loads and Mechanical Performance Analysis of HeliostatsrestyduranNoch keine Bewertungen
- 2022 Wang Ishihara - A New FounDyn Module in OpenFAST To Consider Foundation Dynamics of Monopile Supported Wind Turbines Using A Site-SpecificDokument13 Seiten2022 Wang Ishihara - A New FounDyn Module in OpenFAST To Consider Foundation Dynamics of Monopile Supported Wind Turbines Using A Site-SpecificMarcus Girão de MoraisNoch keine Bewertungen
- 期刊论文全文 6 Transmission TowerDokument13 Seiten期刊论文全文 6 Transmission Towerljt.jacky.leeNoch keine Bewertungen
- Arany Et Al. - 2015 - An Analytical Model To Predict The Natural Frequency of Offshore Wind Turbines On Three-Spring Flexible FoundationDokument6 SeitenArany Et Al. - 2015 - An Analytical Model To Predict The Natural Frequency of Offshore Wind Turbines On Three-Spring Flexible FoundationZheng LiNoch keine Bewertungen
- Computers and Geotechnics: Qian-Feng Gao, Hui Dong, Zong-Wei Deng, Yi-Yue MaDokument9 SeitenComputers and Geotechnics: Qian-Feng Gao, Hui Dong, Zong-Wei Deng, Yi-Yue MaGeovanny TierraNoch keine Bewertungen
- Structures: Yang Yang, Weiming Gong, Yi Pik Cheng, Guoliang Dai, Yuwan Zou, Fayun LiangDokument12 SeitenStructures: Yang Yang, Weiming Gong, Yi Pik Cheng, Guoliang Dai, Yuwan Zou, Fayun LiangJuan Nicolas Montiel SalgadoNoch keine Bewertungen
- Couling EffectsDokument23 SeitenCouling EffectsZmnNoch keine Bewertungen
- Ogbeide and Uwoghiren JDokument9 SeitenOgbeide and Uwoghiren JosaroboNoch keine Bewertungen
- Seismic Response of Wind Turbines: Remi André KjørlaugDokument167 SeitenSeismic Response of Wind Turbines: Remi André Kjørlaugnachopi2005Noch keine Bewertungen
- Adhikari - Bhattacharya - 2011 - Vibrations of Wind-Turbines Considering SSIDokument28 SeitenAdhikari - Bhattacharya - 2011 - Vibrations of Wind-Turbines Considering SSIIWINOSA AGHEDONoch keine Bewertungen
- Engineering Structures: Haoran Zuo, Kaiming Bi, Hong HaoDokument21 SeitenEngineering Structures: Haoran Zuo, Kaiming Bi, Hong HaoSADULLAHNoch keine Bewertungen
- Buffeting Response of A Suspension Bridge in Complex TerrainDokument14 SeitenBuffeting Response of A Suspension Bridge in Complex Terrainkhawaja AliNoch keine Bewertungen
- Aerodynamic Flutter Analysis of Suspension Bridges by A Modal TechniqueDokument8 SeitenAerodynamic Flutter Analysis of Suspension Bridges by A Modal TechniqueSebin GeorgeNoch keine Bewertungen
- Soil Dynamics and Earthquake Engineering: Swagata Bisoi, Sumanta HaldarDokument17 SeitenSoil Dynamics and Earthquake Engineering: Swagata Bisoi, Sumanta HaldarShokoofeAlaviNoch keine Bewertungen
- 2020 Hybrid Pressure Integration and Buffeting Analysis For Multi-Row Wind Loading in An Array of Single-Axis TrackersDokument16 Seiten2020 Hybrid Pressure Integration and Buffeting Analysis For Multi-Row Wind Loading in An Array of Single-Axis TrackersYanfei ZhuNoch keine Bewertungen
- Machines 12 00227 v2Dokument23 SeitenMachines 12 00227 v2Etienne UiSNoch keine Bewertungen
- 1 s2.0 S0029801822007223 MainDokument12 Seiten1 s2.0 S0029801822007223 MainVinicius dos Santos MirandaNoch keine Bewertungen
- Dynamic Analysis Wind Turbine Flexible FoundationDokument21 SeitenDynamic Analysis Wind Turbine Flexible FoundationHaithem NessNoch keine Bewertungen
- Energy-Based Seismic Design Method For EBFs Based On Hysteretic Energy Spectra and Accumulated Ductility Ratio SpectraDokument12 SeitenEnergy-Based Seismic Design Method For EBFs Based On Hysteretic Energy Spectra and Accumulated Ductility Ratio SpectraVladekNoch keine Bewertungen
- Vibration 04 00020 v2Dokument13 SeitenVibration 04 00020 v2uma.bhuvanNoch keine Bewertungen
- Foundation Models For Offshore Wind TurbinesDokument7 SeitenFoundation Models For Offshore Wind TurbinesIago Freitas de AlmeidaNoch keine Bewertungen
- A Study of The Mechanics of An Oscillating Mechanism: Christopher G. ProvatidisDokument12 SeitenA Study of The Mechanics of An Oscillating Mechanism: Christopher G. ProvatidisRockerss RockerssNoch keine Bewertungen
- Development of Earthquake Energy Demand SpectraDokument23 SeitenDevelopment of Earthquake Energy Demand SpectraD Toño ToroNoch keine Bewertungen
- ZM 212350359Dokument10 SeitenZM 212350359AJER JOURNALNoch keine Bewertungen
- Woo Chanjo 2017Dokument14 SeitenWoo Chanjo 2017Said HaggagNoch keine Bewertungen
- Modal Analysis of Horinzontal Axis Wind Turbine Lattice TowerDokument8 SeitenModal Analysis of Horinzontal Axis Wind Turbine Lattice TowerosaroboNoch keine Bewertungen
- CQC3 PDFDokument15 SeitenCQC3 PDFJoaquín SánchezNoch keine Bewertungen
- Dynamic Analysis of Wind Turbines Including Soil-Structure InteractionDokument10 SeitenDynamic Analysis of Wind Turbines Including Soil-Structure InteractionsuzanavilaNoch keine Bewertungen
- Collapse Analysis of A Transmission Tower Under Wind ExcitationDokument7 SeitenCollapse Analysis of A Transmission Tower Under Wind ExcitationRm1262100% (1)
- Dynamic Reliability Analysis of Tower Crane With WDokument8 SeitenDynamic Reliability Analysis of Tower Crane With WYoucef ABARNoch keine Bewertungen
- Design of Large Scale Wind Turbine Towers in Seismic Areas: Iakovos LavassasDokument8 SeitenDesign of Large Scale Wind Turbine Towers in Seismic Areas: Iakovos LavassasYadava JaffaNoch keine Bewertungen
- Energies 15 03925 v2Dokument18 SeitenEnergies 15 03925 v2Mariana Souza RechtmanNoch keine Bewertungen
- A Model For Yawing Dynamic Optimization of A Wind Turbine StructureDokument9 SeitenA Model For Yawing Dynamic Optimization of A Wind Turbine StructureRevan TaeNoch keine Bewertungen
- Damage Caused by Typhoon and Design of Wind Turbine TowersDokument1 SeiteDamage Caused by Typhoon and Design of Wind Turbine TowersChing-wen ChienNoch keine Bewertungen
- Buildings 12 01338Dokument17 SeitenBuildings 12 01338app.nireaNoch keine Bewertungen
- Soil Dynamics and Earthquake Engineering: Aparna Roy, Atanu Santra, Rana RoyDokument19 SeitenSoil Dynamics and Earthquake Engineering: Aparna Roy, Atanu Santra, Rana RoyphamminhquangNoch keine Bewertungen
- 1 s2.0 S0029801824006498 MainDokument18 Seiten1 s2.0 S0029801824006498 Mainmosab.backkupNoch keine Bewertungen
- A Miniature ReactorDokument8 SeitenA Miniature ReactorFernandaNoch keine Bewertungen
- NAOSITE: Nagasaki University's Academic Output SITE: This Document Is Downloaded At: 2016-09-13T03:52:09ZDokument31 SeitenNAOSITE: Nagasaki University's Academic Output SITE: This Document Is Downloaded At: 2016-09-13T03:52:09ZponjoveNoch keine Bewertungen
- Huang Wang ECSCSimulation EESD2017Dokument19 SeitenHuang Wang ECSCSimulation EESD2017Ngai Ho YeungNoch keine Bewertungen
- 2.c.hussien Et Al. (2016)Dokument10 Seiten2.c.hussien Et Al. (2016)Aniruddha BhaduriNoch keine Bewertungen
- Suzuki2019 Article ElasticResponseOfALight-weightDokument14 SeitenSuzuki2019 Article ElasticResponseOfALight-weightNo email HAHANoch keine Bewertungen
- 2021-Ocean Systems EngineeringDokument26 Seiten2021-Ocean Systems EngineeringMoonis zaheerNoch keine Bewertungen
- Bharathi Priya, CDokument9 SeitenBharathi Priya, Cmbbb2Noch keine Bewertungen
- Simplified Seismic Analysis Procedures FDokument19 SeitenSimplified Seismic Analysis Procedures FRive NetNoch keine Bewertungen
- (Porté-Agel, 2011) - Large-Eddy Simulation of Atmospheric Boundary Layer Flow Through WindDokument15 Seiten(Porté-Agel, 2011) - Large-Eddy Simulation of Atmospheric Boundary Layer Flow Through WindDalmedson Freitas FilhoNoch keine Bewertungen
- Hansen 2007Dokument20 SeitenHansen 2007pravnvnNoch keine Bewertungen
- CDRFGDokument19 SeitenCDRFGHaitham AboshoshaNoch keine Bewertungen
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsVon EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNoch keine Bewertungen
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 4: Gravitational and Inertial Control, #4Von EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 4: Gravitational and Inertial Control, #4Noch keine Bewertungen
- SVM For Classification and RegressionDokument113 SeitenSVM For Classification and RegressionYoyok SetyoNoch keine Bewertungen
- Accuracy of Semi-Analytical Sensitivities and Its Improvement by The Natural MethodDokument4 SeitenAccuracy of Semi-Analytical Sensitivities and Its Improvement by The Natural MethodYoyok SetyoNoch keine Bewertungen
- Practical Design Optimization of Truss Structures Using The Genetic AlgorithmsDokument12 SeitenPractical Design Optimization of Truss Structures Using The Genetic AlgorithmsYoyok SetyoNoch keine Bewertungen
- Experimental Evidence of Imperfection Influence On The Buckling of Thin Cylindrical Shell Under Uniform External PressureDokument8 SeitenExperimental Evidence of Imperfection Influence On The Buckling of Thin Cylindrical Shell Under Uniform External PressureYoyok SetyoNoch keine Bewertungen
- Quantifying The Accuracy of Numerical Collapse Predictions For The Design of Submarine Pressure HullsDokument12 SeitenQuantifying The Accuracy of Numerical Collapse Predictions For The Design of Submarine Pressure HullsYoyok SetyoNoch keine Bewertungen
- Finite Element Analysis Based On Stochastic Hamilton Variational PrincipleDokument10 SeitenFinite Element Analysis Based On Stochastic Hamilton Variational PrincipleYoyok Setyo100% (1)
- FEM Based Random VibrationDokument12 SeitenFEM Based Random VibrationYoyok SetyoNoch keine Bewertungen
- Stability of Shell-Stiffened and Axisymmetrically Loaded Annular PlatesDokument18 SeitenStability of Shell-Stiffened and Axisymmetrically Loaded Annular PlatesYoyok SetyoNoch keine Bewertungen
- Experimental Verification of The New Ultimate Strength Equation of Spherical Pressure HullsDokument8 SeitenExperimental Verification of The New Ultimate Strength Equation of Spherical Pressure HullsYoyok SetyoNoch keine Bewertungen
- An Overview of Buckling and Ultimate Strength of Spherical Pressure Hull Under External PressureDokument14 SeitenAn Overview of Buckling and Ultimate Strength of Spherical Pressure Hull Under External PressureYoyok SetyoNoch keine Bewertungen
- F. Manajemen Fakultas-JurusanDokument15 SeitenF. Manajemen Fakultas-JurusanYoyok SetyoNoch keine Bewertungen
- FF y 0, A - T O, P (P, S) ,: Ap + Au Au Au 1Dokument13 SeitenFF y 0, A - T O, P (P, S) ,: Ap + Au Au Au 1Yoyok SetyoNoch keine Bewertungen
- 11 - Chapter 2Dokument13 Seiten11 - Chapter 2Yoyok SetyoNoch keine Bewertungen
- Effect of Axial Load Mode Shapes A N D Frequencies BeamsDokument33 SeitenEffect of Axial Load Mode Shapes A N D Frequencies BeamsYoyok SetyoNoch keine Bewertungen
- Probabilistic Structural Analysis To Quantify Uncertainties Associated With Turbopump BladesDokument15 SeitenProbabilistic Structural Analysis To Quantify Uncertainties Associated With Turbopump BladesYoyok SetyoNoch keine Bewertungen
- Statistical Characteristics of Individual Waves in Laboratory Wind Waves II. Self-Consistent Similarity RegimeDokument2 SeitenStatistical Characteristics of Individual Waves in Laboratory Wind Waves II. Self-Consistent Similarity RegimeYoyok SetyoNoch keine Bewertungen
- 55-Offshore Wind Power BasicsDokument38 Seiten55-Offshore Wind Power BasicsYoyok SetyoNoch keine Bewertungen
- Frequency-Domain Analysis of Otec CW Pipe and Platform DynamicsDokument12 SeitenFrequency-Domain Analysis of Otec CW Pipe and Platform DynamicsYoyok SetyoNoch keine Bewertungen
- Solving The Stochastic Growth Model With A Finite Element MethodDokument26 SeitenSolving The Stochastic Growth Model With A Finite Element MethodYoyok SetyoNoch keine Bewertungen
- Wa0001Dokument17 SeitenWa0001HimanshuNoch keine Bewertungen
- Symmetry, Groups and Crystal StructuresDokument4 SeitenSymmetry, Groups and Crystal StructuresAlsodNoch keine Bewertungen
- Problem: Analyze The 2D Truss As Shown Below. All The Members Have Cross-Sectional Area ofDokument5 SeitenProblem: Analyze The 2D Truss As Shown Below. All The Members Have Cross-Sectional Area ofsmg26thmayNoch keine Bewertungen
- Min To Wheel Calculation UpdateDokument16 SeitenMin To Wheel Calculation UpdateterryltharpNoch keine Bewertungen
- Eurocode 8-1-3Dokument18 SeitenEurocode 8-1-3joaoNoch keine Bewertungen
- Ch2 MC Practice Questions With AnswersDokument3 SeitenCh2 MC Practice Questions With AnswersKit SzeNoch keine Bewertungen
- GPAT Physical Pharmacy SyllabusDokument2 SeitenGPAT Physical Pharmacy Syllabuskumar Harsh100% (1)
- Experiment With Optical PyrometerDokument4 SeitenExperiment With Optical Pyrometersanatb_88100% (1)
- Experiment Procedure: Description of The Experiment Components and Measuring EquipmentsDokument14 SeitenExperiment Procedure: Description of The Experiment Components and Measuring EquipmentsMuhammad Ali Khan AwanNoch keine Bewertungen
- PWOG HZL 6033 PR CAL 001 - New Dust Collector Design and DatasheetDokument3 SeitenPWOG HZL 6033 PR CAL 001 - New Dust Collector Design and DatasheetpavanNoch keine Bewertungen
- Analysis and Calculation 1.1 AnalysisDokument2 SeitenAnalysis and Calculation 1.1 AnalysisAmalia FatinNoch keine Bewertungen
- Simplified Method of Heat Calculations of Oil-Air Heat ExchangersDokument9 SeitenSimplified Method of Heat Calculations of Oil-Air Heat ExchangersAsad KhanNoch keine Bewertungen
- Experiment To Measure Avogadro's Constant.Dokument4 SeitenExperiment To Measure Avogadro's Constant.Td DammikaNoch keine Bewertungen
- Converting Dynamic Impact Events To Equivalent Static Loads in Vehicle ChassisDokument62 SeitenConverting Dynamic Impact Events To Equivalent Static Loads in Vehicle ChassisRm1262Noch keine Bewertungen
- Physics Worksheets (C1)Dokument7 SeitenPhysics Worksheets (C1)DaneswaranNoch keine Bewertungen
- 3 PDFDokument710 Seiten3 PDFMaxe PayneNoch keine Bewertungen
- Statcom ThesisDokument64 SeitenStatcom ThesisAnonymous yD6Qpiq3100% (1)
- Experimental Physics SuperpositionDokument17 SeitenExperimental Physics SuperpositionGrace CywrainNoch keine Bewertungen
- Hydrostatic SensorDokument11 SeitenHydrostatic SensorASTERIXNoch keine Bewertungen
- Syllabus Advanced Dynamics 2018Dokument5 SeitenSyllabus Advanced Dynamics 2018mikeNoch keine Bewertungen
- Cruz - Bscpe - 1-1 - Task#4 The First Law of ThermodynamicsDokument2 SeitenCruz - Bscpe - 1-1 - Task#4 The First Law of ThermodynamicsJoshua CruzNoch keine Bewertungen
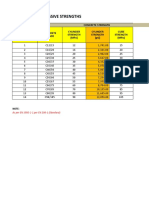
- Concrete Compressive StrengthDokument3 SeitenConcrete Compressive StrengthFranklyn P. Genove100% (1)
- NaturalConvectionHeatTransferCoefficients SI Units Final ProtectedDokument44 SeitenNaturalConvectionHeatTransferCoefficients SI Units Final ProtectedFabio MiguelNoch keine Bewertungen
- Pump Foundation - PS7Dokument65 SeitenPump Foundation - PS7Archana AitawadeNoch keine Bewertungen
- AISC Vertical Brace Connection DesignDokument115 SeitenAISC Vertical Brace Connection DesigndongxiaoNoch keine Bewertungen
- De Rham-Hodge Theory Lecture NotesDokument28 SeitenDe Rham-Hodge Theory Lecture NotesSteven ScottNoch keine Bewertungen
- Charles Law Lesson PlanDokument4 SeitenCharles Law Lesson PlanRea Delos ReyesNoch keine Bewertungen
- Lab Report NozzleDokument9 SeitenLab Report NozzleMuhammad Amir ZarifNoch keine Bewertungen
- Study of Lateral Buckling of Submarine Pipeline: Song Xiaodi, Song XiaoxianDokument4 SeitenStudy of Lateral Buckling of Submarine Pipeline: Song Xiaodi, Song XiaoxianKing1971Noch keine Bewertungen
- ECG353 Week 10 - 11 Chapter 4Dokument44 SeitenECG353 Week 10 - 11 Chapter 4Muhd MuqhreyNoch keine Bewertungen