Das könnte Ihnen auch gefallen
- What's Cooking: Digital Transformation of the Agrifood SystemVon EverandWhat's Cooking: Digital Transformation of the Agrifood SystemNoch keine Bewertungen
- Theories and Finite Elements For Multilayered, Anisotropic, Composite Plates and ShellsDokument54 SeitenTheories and Finite Elements For Multilayered, Anisotropic, Composite Plates and ShellsficuniNoch keine Bewertungen
- MOSFET: Introduction: E&CE 437 Integrated VLSI SystemsDokument15 SeitenMOSFET: Introduction: E&CE 437 Integrated VLSI SystemsPrashanth HamilpurNoch keine Bewertungen
- Lec37-PagingDokument21 SeitenLec37-Pagingfaheem tariqNoch keine Bewertungen
- Survey of Algorithms For The Convex Hull ProblemDokument20 SeitenSurvey of Algorithms For The Convex Hull ProblemKasun Ranga WijeweeraNoch keine Bewertungen
- Moving Mesh Adaptation Scheme For Aerodynamic Shape OptimizationDokument30 SeitenMoving Mesh Adaptation Scheme For Aerodynamic Shape OptimizationOlivier AmoignonNoch keine Bewertungen
- Chap 19Dokument6 SeitenChap 19apratim.chatterjiNoch keine Bewertungen
- Massachusetts Institute of TechnologyDokument3 SeitenMassachusetts Institute of TechnologyJack SoNoch keine Bewertungen
- Engr 357 Lab 4Dokument9 SeitenEngr 357 Lab 4Shyam ThangaNoch keine Bewertungen
- Assignment #1: SolutionDokument2 SeitenAssignment #1: SolutionAll OneNoch keine Bewertungen
- Image Erosion and Dilation ComparisonDokument2 SeitenImage Erosion and Dilation ComparisonAll OneNoch keine Bewertungen
- FEM-earthquake Theoretical GroundsDokument22 SeitenFEM-earthquake Theoretical GroundsnishantNoch keine Bewertungen
- Assignment #1: SolutionDokument2 SeitenAssignment #1: SolutionAll OneNoch keine Bewertungen
- Assignment #1: SolutionDokument2 SeitenAssignment #1: SolutionAll OneNoch keine Bewertungen
- Assignment #1: SolutionDokument2 SeitenAssignment #1: SolutionAll OneNoch keine Bewertungen
- 4-bit synchronous counter designDokument2 Seiten4-bit synchronous counter designmirosehNoch keine Bewertungen
- Lyapunov PDFDokument11 SeitenLyapunov PDF정문열Noch keine Bewertungen
- BI2002B - Circuitos LógicosDokument30 SeitenBI2002B - Circuitos LógicosHéctor Vega SantamaríaNoch keine Bewertungen
- Mechanisms and Machines Kinematics Dynamics and Synthesis Si Edition 1st Edition Stanisic Solutions ManualDokument26 SeitenMechanisms and Machines Kinematics Dynamics and Synthesis Si Edition 1st Edition Stanisic Solutions ManualNicoleTuckeroajx100% (52)
- Dwnload Full Mechanisms and Machines Kinematics Dynamics and Synthesis Si Edition 1st Edition Stanisic Solutions Manual PDFDokument36 SeitenDwnload Full Mechanisms and Machines Kinematics Dynamics and Synthesis Si Edition 1st Edition Stanisic Solutions Manual PDFjerrybriggs7d5t0v100% (10)
- Mechanisms and Machines Kinematics Dynamics and Synthesis Si Edition 1st Edition Stanisic Solutions ManualDokument36 SeitenMechanisms and Machines Kinematics Dynamics and Synthesis Si Edition 1st Edition Stanisic Solutions Manualronbowmantdd2bh100% (21)
- Quantum Transport: Summer Semester 2017Dokument35 SeitenQuantum Transport: Summer Semester 2017Satkas DimitriosNoch keine Bewertungen
- Wheatstone Bridge and The Diode: 1 ObjectDokument4 SeitenWheatstone Bridge and The Diode: 1 ObjectathavanNoch keine Bewertungen
- Mechanisms and Machines Kinematics Dynamics and Synthesis 1st Edition Stanisic Solutions ManualDokument36 SeitenMechanisms and Machines Kinematics Dynamics and Synthesis 1st Edition Stanisic Solutions Manualronbowmantdd2bh100% (26)
- Dwnload Full Mechanisms and Machines Kinematics Dynamics and Synthesis 1st Edition Stanisic Solutions Manual PDFDokument36 SeitenDwnload Full Mechanisms and Machines Kinematics Dynamics and Synthesis 1st Edition Stanisic Solutions Manual PDFjerrybriggs7d5t0v100% (11)
- ASCEKFactorsDokument2 SeitenASCEKFactorsavellan.crNoch keine Bewertungen
- 2.1.1.a AOITruthTablesToLogicExpressionsDokument6 Seiten2.1.1.a AOITruthTablesToLogicExpressionsmkorlbeastNoch keine Bewertungen
- Security Lab Assignment1Dokument3 SeitenSecurity Lab Assignment1enkaz7yatNoch keine Bewertungen
- 08.5 MSA Atributivna Sonda Ø 2.14Dokument1 Seite08.5 MSA Atributivna Sonda Ø 2.14Stefan DončevićNoch keine Bewertungen
- Mechanisms and Machines Kinematics Dynamics and Synthesis 1st Edition Stanisic Solutions ManualDokument28 SeitenMechanisms and Machines Kinematics Dynamics and Synthesis 1st Edition Stanisic Solutions Manualalecburgessxsmkgptzqi100% (15)
- IFA MergedDokument15 SeitenIFA MergednalumilanimeNoch keine Bewertungen
- StatesDokument1 SeiteStatesBRYAN ALFRED FERRERNoch keine Bewertungen
- Digital Design Lab ReportDokument7 SeitenDigital Design Lab ReportJohn DoeNoch keine Bewertungen
- Finite Element Method: Problems On Two-Dimensional Isoparametric Elements and Numerical IntegrationDokument8 SeitenFinite Element Method: Problems On Two-Dimensional Isoparametric Elements and Numerical IntegrationHR TusherNoch keine Bewertungen
- 1 Applications of Nearest NeighborDokument5 Seiten1 Applications of Nearest NeighboriimranmalikNoch keine Bewertungen
- Activity 2.1.3 Truth Tables & Logic Expressions: Jireh AlbertoDokument7 SeitenActivity 2.1.3 Truth Tables & Logic Expressions: Jireh Alberto2024hafNoch keine Bewertungen
- Magnetic Resonance DowsingDokument35 SeitenMagnetic Resonance DowsingpauloNoch keine Bewertungen
- Unit2Activities-GUMANAD, RICKY Q.Dokument12 SeitenUnit2Activities-GUMANAD, RICKY Q.Ricky GumanadNoch keine Bewertungen
- Ex ADokument5 SeitenEx AAnn Grace GarduqueNoch keine Bewertungen
- Piv Ring PlateDokument17 SeitenPiv Ring PlateGabriel ArevaloNoch keine Bewertungen
- Experiment 5: Introduction To Troubleshooting: ENGR 357 Section 1 Fall 2019Dokument4 SeitenExperiment 5: Introduction To Troubleshooting: ENGR 357 Section 1 Fall 2019Shyam ThangaNoch keine Bewertungen
- Lec 2-Connectivity PDFDokument26 SeitenLec 2-Connectivity PDFANDRES FELIPE OTALVAREZ AREVALONoch keine Bewertungen
- Data PraktikumDokument3 SeitenData PraktikumbambangNoch keine Bewertungen
- Parity Method For Error Detection:: EX: Check An Even Parity (Ep) and Odd Parity (Op) For The FollowingDokument2 SeitenParity Method For Error Detection:: EX: Check An Even Parity (Ep) and Odd Parity (Op) For The FollowingDamilola OniNoch keine Bewertungen
- Homework Week 1Dokument3 SeitenHomework Week 1JonatanNoch keine Bewertungen
- Fundamentals of Computational Neuroscience 2 EdDokument19 SeitenFundamentals of Computational Neuroscience 2 Edgore.aakash1612Noch keine Bewertungen
- 2nd Year EContent - 1 - 2024 - 03 - 22 - 14 - 43 - 32 - Assignment5pdf - 2024 - 01 - 11 - 11 - 15 - 21Dokument3 Seiten2nd Year EContent - 1 - 2024 - 03 - 22 - 14 - 43 - 32 - Assignment5pdf - 2024 - 01 - 11 - 11 - 15 - 21soothhackerzNoch keine Bewertungen
- Analisis SoalDokument4 SeitenAnalisis SoalMusesuNoch keine Bewertungen
- PROBLEM SET 10 SolutionsDokument34 SeitenPROBLEM SET 10 Solutionsnandini katariaNoch keine Bewertungen
- Morphological Image Processing: DR Avdhesh Gupta, IMS Engineering College, GhaziabadDokument49 SeitenMorphological Image Processing: DR Avdhesh Gupta, IMS Engineering College, Ghaziabadvishal aggarwalNoch keine Bewertungen
- Tutorial 3Dokument10 SeitenTutorial 3kanuni41Noch keine Bewertungen
- Troubleshooting Using Boot DiagnosticsDokument6 SeitenTroubleshooting Using Boot DiagnosticsgmludNoch keine Bewertungen
- Laboratory Exercise 7Dokument4 SeitenLaboratory Exercise 7BriNyanNoch keine Bewertungen
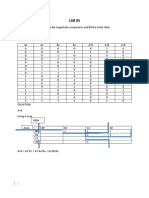
- Task 1: Make The Circuit of 2-Bit Magnitude Comparator and Fill The Truth Table. Solution: Truth TableDokument4 SeitenTask 1: Make The Circuit of 2-Bit Magnitude Comparator and Fill The Truth Table. Solution: Truth Tablewaleed infoNoch keine Bewertungen
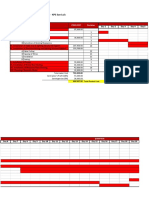
- Project: Renovation of Building - KPS San Luis LOCATION: San Luis, BatangasDokument3 SeitenProject: Renovation of Building - KPS San Luis LOCATION: San Luis, BatangasNomark SilangNoch keine Bewertungen
- Correlation Between Subjects' Scores on Different TestsDokument3 SeitenCorrelation Between Subjects' Scores on Different TestsQaulan SadiidanNoch keine Bewertungen
- Ee222 Lab 3Dokument9 SeitenEe222 Lab 3Jakob NandNoch keine Bewertungen
- Maquina de Estado Finito Con MooreDokument12 SeitenMaquina de Estado Finito Con MooreJuandiego Nuñez SalasNoch keine Bewertungen
- CSPC Summative Zulueta PDFDokument2 SeitenCSPC Summative Zulueta PDFAaron ZuluetaNoch keine Bewertungen
- MSU Fatima Campus Digital Design Projects on Sequential LogicDokument10 SeitenMSU Fatima Campus Digital Design Projects on Sequential LogicJanus Rau CunananNoch keine Bewertungen
- Size Distribution 15 PDFDokument20 SeitenSize Distribution 15 PDFandreinaNoch keine Bewertungen
- Sediment and Water Quality in Hec-Ras: Mark JensenDokument27 SeitenSediment and Water Quality in Hec-Ras: Mark JensenandreinaNoch keine Bewertungen
- Diferenciacion NumericaDokument9 SeitenDiferenciacion NumericaandreinaNoch keine Bewertungen
- Buoyancy, Stability and Masses Subjected To AccelerationDokument12 SeitenBuoyancy, Stability and Masses Subjected To AccelerationandreinaNoch keine Bewertungen
- Fluids in Rigid Body MotionDokument34 SeitenFluids in Rigid Body Motionandreina100% (1)
- High Frequency Techniques in ElectromagneticsDokument34 SeitenHigh Frequency Techniques in Electromagneticsవేలుసామి లింగాసామిNoch keine Bewertungen
- Balancing of Reciprocating MassesDokument43 SeitenBalancing of Reciprocating MassesNAVEENNoch keine Bewertungen
- Nfpa 497 2012Dokument1 SeiteNfpa 497 2012Kaka Baba100% (1)
- Astm A-252Dokument9 SeitenAstm A-252Dayana HernandezNoch keine Bewertungen
- Steel - Chapter 4Dokument18 SeitenSteel - Chapter 4Kristoffer NaridoNoch keine Bewertungen
- Circle TheoremsDokument26 SeitenCircle TheoremsArman JavedNoch keine Bewertungen
- Basics of Boolean AlgebraDokument21 SeitenBasics of Boolean AlgebraKabhiNoch keine Bewertungen
- User Guide: Newland Android PDA UHF ApplicationDokument14 SeitenUser Guide: Newland Android PDA UHF ApplicationTunitrackNoch keine Bewertungen
- Gabion Walls Presentation FijiDokument38 SeitenGabion Walls Presentation FijiHuy ChungNoch keine Bewertungen
- D Block Notes StudymateDokument9 SeitenD Block Notes StudymateArjun PasrichaNoch keine Bewertungen
- Sample C++ Program On BankingDokument17 SeitenSample C++ Program On BankingLakshminarayanan67% (6)
- Ch2 Operating-System StructuresDokument88 SeitenCh2 Operating-System Structurescs LiuNoch keine Bewertungen
- Grados: Rad Ia Ne SDokument4 SeitenGrados: Rad Ia Ne SJean Pierre AHNoch keine Bewertungen
- Basson Considerations 2005Dokument113 SeitenBasson Considerations 2005Maxmore KarumamupiyoNoch keine Bewertungen
- Design of Pilot Plant For The Production of Essential Oil From Eucalyptus LeavesDokument5 SeitenDesign of Pilot Plant For The Production of Essential Oil From Eucalyptus LeavesNaomi HerreraNoch keine Bewertungen
- PVT ModellingDokument6 SeitenPVT ModellingFan JackNoch keine Bewertungen
- Quarterly Assessment Report in Mathematics Grade 1 First Quarter, SY 2019-2020Dokument5 SeitenQuarterly Assessment Report in Mathematics Grade 1 First Quarter, SY 2019-2020William Felisilda100% (1)
- SCC - Electonics - Q4M3Weeks5-6 - PASSED NO AKDokument18 SeitenSCC - Electonics - Q4M3Weeks5-6 - PASSED NO AKLyle Isaac L. IllagaNoch keine Bewertungen
- Unesco Als Ls3 Math m05 SG (v1.3)Dokument24 SeitenUnesco Als Ls3 Math m05 SG (v1.3)als midsayap1100% (2)
- Density and Archimedes' PrincipleDokument3 SeitenDensity and Archimedes' PrincipleHoneylet Ü FerolNoch keine Bewertungen
- Ir-Ugc (Net) : Previous Year Solved Paper (PSP)Dokument48 SeitenIr-Ugc (Net) : Previous Year Solved Paper (PSP)COPA ITINoch keine Bewertungen
- E FLIGHT-roland Berger Aircraft Electrical PropulsionDokument134 SeitenE FLIGHT-roland Berger Aircraft Electrical Propulsionugo_rossiNoch keine Bewertungen
- Cold Rolled CoilDokument23 SeitenCold Rolled Coilmametcool100% (1)
- Hexagon MI Aicon Scanning Solutions Brochure ENDokument24 SeitenHexagon MI Aicon Scanning Solutions Brochure ENekopujiantoeNoch keine Bewertungen
- UK Tutorial MotorControl PDFDokument27 SeitenUK Tutorial MotorControl PDFDefinal ChaniagoNoch keine Bewertungen
- Pareto Analysis v2.ppt 1Dokument7 SeitenPareto Analysis v2.ppt 1prabu06051984Noch keine Bewertungen
- Guidlines For SeatrialsDokument14 SeitenGuidlines For SeatrialsmariodalNoch keine Bewertungen
- Differentiating Aldehydes and KetonesDokument12 SeitenDifferentiating Aldehydes and KetonesNurul Hasanah100% (1)
- Mapeo ComputoDokument20 SeitenMapeo ComputoGuillermo Santiago Robles RangelNoch keine Bewertungen
- Hero Found: The Greatest POW Escape of the Vietnam WarVon EverandHero Found: The Greatest POW Escape of the Vietnam WarBewertung: 4 von 5 Sternen4/5 (19)
- The Fabric of Civilization: How Textiles Made the WorldVon EverandThe Fabric of Civilization: How Textiles Made the WorldBewertung: 4.5 von 5 Sternen4.5/5 (57)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- Transformed: Moving to the Product Operating ModelVon EverandTransformed: Moving to the Product Operating ModelBewertung: 4 von 5 Sternen4/5 (1)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationVon EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationBewertung: 4.5 von 5 Sternen4.5/5 (46)
- The End of Craving: Recovering the Lost Wisdom of Eating WellVon EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellBewertung: 4.5 von 5 Sternen4.5/5 (80)
- Highest Duty: My Search for What Really MattersVon EverandHighest Duty: My Search for What Really MattersNoch keine Bewertungen
- System Error: Where Big Tech Went Wrong and How We Can RebootVon EverandSystem Error: Where Big Tech Went Wrong and How We Can RebootNoch keine Bewertungen
- Sully: The Untold Story Behind the Miracle on the HudsonVon EverandSully: The Untold Story Behind the Miracle on the HudsonBewertung: 4 von 5 Sternen4/5 (103)
- A Place of My Own: The Architecture of DaydreamsVon EverandA Place of My Own: The Architecture of DaydreamsBewertung: 4 von 5 Sternen4/5 (242)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureVon EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureBewertung: 5 von 5 Sternen5/5 (125)
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterVon EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterNoch keine Bewertungen
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaVon EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNoch keine Bewertungen
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestVon EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestBewertung: 4 von 5 Sternen4/5 (28)
- Reality+: Virtual Worlds and the Problems of PhilosophyVon EverandReality+: Virtual Worlds and the Problems of PhilosophyBewertung: 4 von 5 Sternen4/5 (24)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyVon EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNoch keine Bewertungen
- Packing for Mars: The Curious Science of Life in the VoidVon EverandPacking for Mars: The Curious Science of Life in the VoidBewertung: 4 von 5 Sternen4/5 (1395)
- Mini Farming: Self-Sufficiency on 1/4 AcreVon EverandMini Farming: Self-Sufficiency on 1/4 AcreBewertung: 4 von 5 Sternen4/5 (76)
- 35 Miles From Shore: The Ditching and Rescue of ALM Flight 980Von Everand35 Miles From Shore: The Ditching and Rescue of ALM Flight 980Bewertung: 4 von 5 Sternen4/5 (21)
- The Weather Machine: A Journey Inside the ForecastVon EverandThe Weather Machine: A Journey Inside the ForecastBewertung: 3.5 von 5 Sternen3.5/5 (31)
- The Future of Geography: How the Competition in Space Will Change Our WorldVon EverandThe Future of Geography: How the Competition in Space Will Change Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (4)
- Permaculture for the Rest of Us: Abundant Living on Less than an AcreVon EverandPermaculture for the Rest of Us: Abundant Living on Less than an AcreBewertung: 4.5 von 5 Sternen4.5/5 (33)
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseVon EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseBewertung: 3.5 von 5 Sternen3.5/5 (12)
- The Path Between the Seas: The Creation of the Panama Canal, 1870-1914Von EverandThe Path Between the Seas: The Creation of the Panama Canal, 1870-1914Bewertung: 4.5 von 5 Sternen4.5/5 (124)