Das könnte Ihnen auch gefallen
- Vlsi Design Approach To High-Performance Direct Torque Control of Induction Motor DrivesDokument8 SeitenVlsi Design Approach To High-Performance Direct Torque Control of Induction Motor Drivesjooner45Noch keine Bewertungen
- FPGA-Based Implementation of Digital Control For A Magnetic BearingDokument6 SeitenFPGA-Based Implementation of Digital Control For A Magnetic Bearingajith.ganesh2420Noch keine Bewertungen
- An Improved FPGA Implementation of Direct Torque Control For Induction MachinesDokument10 SeitenAn Improved FPGA Implementation of Direct Torque Control For Induction Machinesvineeth kumarNoch keine Bewertungen
- A Rapid Prototype Design To Investigate The FPGA Based DTC Strategy Applied To The Speed Control of IMDokument6 SeitenA Rapid Prototype Design To Investigate The FPGA Based DTC Strategy Applied To The Speed Control of IMsajs201Noch keine Bewertungen
- Reduction of Torque Ripple in DTC For Induction Motor Using Input-Output Feedback LinearizationDokument13 SeitenReduction of Torque Ripple in DTC For Induction Motor Using Input-Output Feedback LinearizationRajendra KumarNoch keine Bewertungen
- Simulation and Analysis of Modified DTC of PMSMDokument10 SeitenSimulation and Analysis of Modified DTC of PMSMpreetivermaeeeNoch keine Bewertungen
- 4th Process TomograpgyDokument6 Seiten4th Process TomograpgyEmmanuel Abdias Romano CastilloNoch keine Bewertungen
- Maximum Power Point Tracker For Wind Energy Generation Systems Using Matrix ConvertersDokument6 SeitenMaximum Power Point Tracker For Wind Energy Generation Systems Using Matrix ConvertersmohammedNoch keine Bewertungen
- FPGA Based Processor in The Loop Analysis of Variable Reluctance Machine With Speed ControlDokument6 SeitenFPGA Based Processor in The Loop Analysis of Variable Reluctance Machine With Speed ControlJules ChristianNoch keine Bewertungen
- Motor Speed Control Using FPGA: July 2014Dokument5 SeitenMotor Speed Control Using FPGA: July 2014Jaime SaenzNoch keine Bewertungen
- Internal ModelDokument15 SeitenInternal ModelDiego RamirezNoch keine Bewertungen
- A Comparative Study of Damping Subsynchronous Resonance Using TCSC and IMDUDokument6 SeitenA Comparative Study of Damping Subsynchronous Resonance Using TCSC and IMDUAnkita AroraNoch keine Bewertungen
- DTC-SVM Scheme For Induction Motors Fed With A Three-Level InverterDokument5 SeitenDTC-SVM Scheme For Induction Motors Fed With A Three-Level Inverterdam_dar666Noch keine Bewertungen
- PID3410305 Final 1Dokument7 SeitenPID3410305 Final 1Geetha SreeNoch keine Bewertungen
- Adaptive Microcomputer: Controller ImplementationDokument11 SeitenAdaptive Microcomputer: Controller ImplementationToe Zune MayNoch keine Bewertungen
- IR-drop Reduction Through Combinational Circuit PartitioningDokument12 SeitenIR-drop Reduction Through Combinational Circuit PartitioningPramod Reddy RNoch keine Bewertungen
- A Design Configuration of An FPGA BasedDokument5 SeitenA Design Configuration of An FPGA BasedMax dos santos ramosNoch keine Bewertungen
- 4 Direct Torque Control of Induction Motor Using SimulinkDokument6 Seiten4 Direct Torque Control of Induction Motor Using Simulinkapi-19508046Noch keine Bewertungen
- DTC Control of DFIG-Generators For Wind Turbines FPGA Implementation BasedDokument6 SeitenDTC Control of DFIG-Generators For Wind Turbines FPGA Implementation BasedJevin ZackNoch keine Bewertungen
- Analog Circuit Sizing Using Adaptive Worst-Case Parameters SetsDokument5 SeitenAnalog Circuit Sizing Using Adaptive Worst-Case Parameters SetswoshisimoxNoch keine Bewertungen
- FPGA Implementation On SVPWM MLIDokument5 SeitenFPGA Implementation On SVPWM MLISheetal VermaNoch keine Bewertungen
- PExprt v71 L01 IntroductionDokument26 SeitenPExprt v71 L01 IntroductionEdwin C. Abregú100% (2)
- Dynamic Modeling and Simulation of SVM-DTC of Five Phase Induction MotorDokument6 SeitenDynamic Modeling and Simulation of SVM-DTC of Five Phase Induction MotormssmsNoch keine Bewertungen
- An Adaptive Auto-Reclosing Scheme To Preserve Transient Stability of MicrogridsDokument9 SeitenAn Adaptive Auto-Reclosing Scheme To Preserve Transient Stability of MicrogridsRicho TetukoNoch keine Bewertungen
- Advanced TDK Techniques: Application Note 62-3 May 1990Dokument24 SeitenAdvanced TDK Techniques: Application Note 62-3 May 1990Alércio RosaNoch keine Bewertungen
- Stator Winding Induction Motor in The EMTPDokument8 SeitenStator Winding Induction Motor in The EMTPEleazar Sierra EspinozaNoch keine Bewertungen
- Estimation of Synchronous Machine Parameters by Stand Still Frequency Responses TestingDokument8 SeitenEstimation of Synchronous Machine Parameters by Stand Still Frequency Responses TestingAmr AmrNoch keine Bewertungen
- Sliding Mode Brushless DC Motor Current Torque Control AlgorithmsDokument6 SeitenSliding Mode Brushless DC Motor Current Torque Control Algorithmscarolain_msNoch keine Bewertungen
- Omparative Performance Analysis of Field Oriented Control and Direct Torque Control For A Fractional-Slot Concentrated Winding Interior Permanent Magnet Synchronous MachineDokument7 SeitenOmparative Performance Analysis of Field Oriented Control and Direct Torque Control For A Fractional-Slot Concentrated Winding Interior Permanent Magnet Synchronous MachineuossifNoch keine Bewertungen
- DEsign and Implementation of PID On FPGADokument6 SeitenDEsign and Implementation of PID On FPGAdhirendraNoch keine Bewertungen
- A Low Power Radix-2 FFT Accelerator For FPGADokument5 SeitenA Low Power Radix-2 FFT Accelerator For FPGAMuhammad Majid AltafNoch keine Bewertungen
- A New Approach For Placement of FACTS Devices in Open Power MarketsDokument3 SeitenA New Approach For Placement of FACTS Devices in Open Power MarketsheerapotterNoch keine Bewertungen
- IISTE Journals Publication Nearest EditiDokument8 SeitenIISTE Journals Publication Nearest EditiNguyễn Hải ĐăngNoch keine Bewertungen
- Comparison of DTC and FOCDokument5 SeitenComparison of DTC and FOCJuseverck JuniorNoch keine Bewertungen
- Space Vector PWM - 1Dokument5 SeitenSpace Vector PWM - 1guanitouNoch keine Bewertungen
- Generic Model For Multi-Phase Ring Oscillators: Member Member Senior Member, Ieee Senior Member, IEEEDokument4 SeitenGeneric Model For Multi-Phase Ring Oscillators: Member Member Senior Member, Ieee Senior Member, IEEENguyen Van ToanNoch keine Bewertungen
- 1 (R2MDC) A Low Power Radix-2 FFT Accelerator For FPGADokument5 Seiten1 (R2MDC) A Low Power Radix-2 FFT Accelerator For FPGAyunqi guanNoch keine Bewertungen
- Design of PID CONTROLLERDokument6 SeitenDesign of PID CONTROLLERRAJ KUMAR SHIHINoch keine Bewertungen
- Development of MCA (Flash-ADC/FPGA) For Gamma Spectroscopy Using NaI (TL) DetectorDokument27 SeitenDevelopment of MCA (Flash-ADC/FPGA) For Gamma Spectroscopy Using NaI (TL) DetectorKen BuiNoch keine Bewertungen
- Charge Intergraion - Analog Vs DigitalDokument8 SeitenCharge Intergraion - Analog Vs DigitalKen BuiNoch keine Bewertungen
- Internship PresentationDokument41 SeitenInternship PresentationNIKHILNoch keine Bewertungen
- Tesis JuanCamiloNustes Article Format Draft2Dokument19 SeitenTesis JuanCamiloNustes Article Format Draft2kamdem kouam ynnickNoch keine Bewertungen
- dSPACE Implementation of Fuzzy Logic Based Vector Control of Induction MotorDokument6 SeitendSPACE Implementation of Fuzzy Logic Based Vector Control of Induction MotorAshwani RanaNoch keine Bewertungen
- New DTC WRKDokument8 SeitenNew DTC WRKNAENWI YAABARINoch keine Bewertungen
- Automated Parameter Extraction and SPICE ModelDokument4 SeitenAutomated Parameter Extraction and SPICE ModelkimjinNoch keine Bewertungen
- Content ServerDokument16 SeitenContent Serverayoub reseauNoch keine Bewertungen
- A High-Speed/Low-Power Multiplier Using An Advanced Spurious Power Suppression TechniqueDokument4 SeitenA High-Speed/Low-Power Multiplier Using An Advanced Spurious Power Suppression TechniqueBappy DebnathNoch keine Bewertungen
- Fpga Based Real Time Simulation For Electrical MachinesDokument6 SeitenFpga Based Real Time Simulation For Electrical MachinesshivguptaNoch keine Bewertungen
- Analytical Prediction of Switching Losses in Mosfets For Variable Drain-Source Voltage and Current ApplicationsDokument6 SeitenAnalytical Prediction of Switching Losses in Mosfets For Variable Drain-Source Voltage and Current ApplicationsSateesh TalisettyNoch keine Bewertungen
- A Low-Power, High-Speed DCT Architecture For Image Compression: Principle and ImplementationDokument6 SeitenA Low-Power, High-Speed DCT Architecture For Image Compression: Principle and ImplementationPrapulla Kumar RNoch keine Bewertungen
- Exploring The Problems and Remedies: Lech M. Grzesiak and Marian P. KazmierkowskiDokument12 SeitenExploring The Problems and Remedies: Lech M. Grzesiak and Marian P. KazmierkowskiSathishraj SaraajNoch keine Bewertungen
- A New Predictive Direct Torque Control For Vernier Permanent Magnet Synchronous Motor Based On Duty Ratio ModulationDokument7 SeitenA New Predictive Direct Torque Control For Vernier Permanent Magnet Synchronous Motor Based On Duty Ratio ModulationmmrNoch keine Bewertungen
- Discontinuous SVPWM TechniquesDokument6 SeitenDiscontinuous SVPWM TechniquesAnonymous 1D3dCWNcNoch keine Bewertungen
- A Pc-Cluster Based Fully Digital Real-Time Simulation of A Field-Oriented Speed Controller For An Induction MotorDokument25 SeitenA Pc-Cluster Based Fully Digital Real-Time Simulation of A Field-Oriented Speed Controller For An Induction MotorSahabat SimatupangNoch keine Bewertungen
- Zhang 2016Dokument3 SeitenZhang 2016Elisa Alejandra Salcedo MartínezNoch keine Bewertungen
- High Speed Digital Distance Relaying Scheme Using FPGA and IEC 61850Dokument11 SeitenHigh Speed Digital Distance Relaying Scheme Using FPGA and IEC 61850ashishNoch keine Bewertungen
- DC Motor Speed Control ThesisDokument5 SeitenDC Motor Speed Control Thesisafloziubadtypc100% (1)
- Amca05073 PDFDokument6 SeitenAmca05073 PDFEmil EneNoch keine Bewertungen
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsVon EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNoch keine Bewertungen
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkVon EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNoch keine Bewertungen
- HW1Dokument1 SeiteHW1Anonymous AFFiZnNoch keine Bewertungen
- 10.1007/978 3 642 36321 4Dokument767 Seiten10.1007/978 3 642 36321 4Anonymous AFFiZnNoch keine Bewertungen
- HW2Dokument1 SeiteHW2Anonymous AFFiZnNoch keine Bewertungen
- Course Mat BestDokument2 SeitenCourse Mat BestAnonymous AFFiZnNoch keine Bewertungen
- Fuzzy-Pid Based Performance Analysis of DC MotorDokument8 SeitenFuzzy-Pid Based Performance Analysis of DC MotorAnonymous AFFiZnNoch keine Bewertungen
- Usage Simulation ManDokument13 SeitenUsage Simulation ManAnonymous AFFiZnNoch keine Bewertungen
- Limitations Imposed by RHP Zeros/Poles in Multivariable SystemsDokument6 SeitenLimitations Imposed by RHP Zeros/Poles in Multivariable SystemsAnonymous AFFiZnNoch keine Bewertungen
- EE106b Project Overview and Rubric: 1 Due DatesDokument3 SeitenEE106b Project Overview and Rubric: 1 Due DatesAnonymous AFFiZnNoch keine Bewertungen
- CCOVERDokument1 SeiteCCOVERAnonymous AFFiZnNoch keine Bewertungen
- SoftwareDokument1 SeiteSoftwareAnonymous AFFiZnNoch keine Bewertungen
- EE106b Project Ideas: 1 GuidelinesDokument3 SeitenEE106b Project Ideas: 1 GuidelinesAnonymous AFFiZnNoch keine Bewertungen
- Area of Research and Applicant Profile Form: FundingDokument4 SeitenArea of Research and Applicant Profile Form: FundingAnonymous AFFiZnNoch keine Bewertungen
- Decentralized Stochastic Control: Aditya MahajanDokument50 SeitenDecentralized Stochastic Control: Aditya MahajanAnonymous AFFiZnNoch keine Bewertungen
- Dynamics and Control of A 3D Pendulum: Jinglais, Asanyal, Nalin, Dsbaero, NHM @engin - Umich.eduDokument6 SeitenDynamics and Control of A 3D Pendulum: Jinglais, Asanyal, Nalin, Dsbaero, NHM @engin - Umich.eduAnonymous AFFiZnNoch keine Bewertungen
- Active Learning: R W RevansDokument3 SeitenActive Learning: R W RevansAnonymous AFFiZnNoch keine Bewertungen
- Privacy-Optimal Strategies For Smart Metering Systems With A Rechargeable BatteryDokument51 SeitenPrivacy-Optimal Strategies For Smart Metering Systems With A Rechargeable BatteryAnonymous AFFiZnNoch keine Bewertungen
- Double 3D Pendulum Model Features: - The Lower Body Is An Axially Symmetric Rigid LinkDokument2 SeitenDouble 3D Pendulum Model Features: - The Lower Body Is An Axially Symmetric Rigid LinkAnonymous AFFiZnNoch keine Bewertungen
- Learning Theories Multiple IntelligencesDokument5 SeitenLearning Theories Multiple IntelligencesAnonymous AFFiZnNoch keine Bewertungen
- Wireless FM Microphone CircuitDokument2 SeitenWireless FM Microphone Circuitcuongspvl2713Noch keine Bewertungen
- Boss Bass Overdrive - ODB-3 - E4Dokument16 SeitenBoss Bass Overdrive - ODB-3 - E4Mateus Barbosa Gomes AbreuNoch keine Bewertungen
- Godrej IndustriesAR2018 Low Rse 100818Dokument30 SeitenGodrej IndustriesAR2018 Low Rse 100818AbhishekNoch keine Bewertungen
- Panasonic TX p42x20b, P42x20e, p42x20l, P42x25e, P42x25es, Pf42x20 Chassis Gph13deDokument120 SeitenPanasonic TX p42x20b, P42x20e, p42x20l, P42x25e, P42x25es, Pf42x20 Chassis Gph13deMarek LeskoNoch keine Bewertungen
- Pu Assignment 1Dokument2 SeitenPu Assignment 1jasonNoch keine Bewertungen
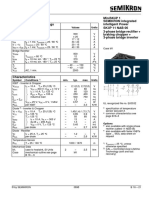
- SKIIP11NAB06Dokument4 SeitenSKIIP11NAB06Cucu Catalin100% (1)
- P6KE Series: Silicon Avalanche DiodesDokument5 SeitenP6KE Series: Silicon Avalanche Diodesrafael quiaroNoch keine Bewertungen
- TechRef Load PDFDokument26 SeitenTechRef Load PDFRafat ThongNoch keine Bewertungen
- HCF4060B 14-Stage Ripple Carry Binary Counter/divider and OscillatorDokument9 SeitenHCF4060B 14-Stage Ripple Carry Binary Counter/divider and OscillatorSherif EltoukhiNoch keine Bewertungen
- XR7 Driving LightDokument1 SeiteXR7 Driving LightPurple IndustriesNoch keine Bewertungen
- Atomic Structure AssignmentDokument7 SeitenAtomic Structure AssignmentiknoweverythingdoyouknowNoch keine Bewertungen
- Two Port NetworkDokument6 SeitenTwo Port NetworkmailmelakshayNoch keine Bewertungen
- Lab 4 Fluid Drive SystemDokument4 SeitenLab 4 Fluid Drive SystemMohd Radzi Kaki LimoNoch keine Bewertungen
- Unit 1Dokument57 SeitenUnit 1AdityaNoch keine Bewertungen
- 3-Channel Linear Driver: Ics For Cd/Cd-Rom PlayerDokument4 Seiten3-Channel Linear Driver: Ics For Cd/Cd-Rom PlayertommyhghNoch keine Bewertungen
- Org A No Metallic CompoundsDokument17 SeitenOrg A No Metallic Compoundsthestar55100% (2)
- A Low-Power High-Speed Comparator For Precise ApplicationsDokument12 SeitenA Low-Power High-Speed Comparator For Precise Applications陳昀顥Noch keine Bewertungen
- Vishay Capacitor CatalogueDokument14 SeitenVishay Capacitor Catalogueviren72100% (1)
- Blind Stick PaperDokument5 SeitenBlind Stick PaperAnonymous Ndsvh2soNoch keine Bewertungen
- Resistance ExerciseDokument2 SeitenResistance ExerciseD7ooM 612100% (1)
- Electrical Engineering Diploma Based 73 Important MCQDokument12 SeitenElectrical Engineering Diploma Based 73 Important MCQchetanNoch keine Bewertungen
- Littelfuse TVS Diode TPSMA6L Datasheet PDFDokument6 SeitenLittelfuse TVS Diode TPSMA6L Datasheet PDFsnobic9379Noch keine Bewertungen
- LG HT964TZ PDFDokument71 SeitenLG HT964TZ PDFboroda2410100% (1)
- Unit 4 Carbon Materials Fo Stealth, Health and Energy NotesDokument12 SeitenUnit 4 Carbon Materials Fo Stealth, Health and Energy NotesSanjay KumarNoch keine Bewertungen
- IDA - QuesbankDokument10 SeitenIDA - QuesbankKavitha KaviNoch keine Bewertungen
- Earth Leakage TesterDokument4 SeitenEarth Leakage TesterAvinash Babu Km100% (1)
- Pentadyne VSS BrochureDokument4 SeitenPentadyne VSS BrochureWalid WahyudiNoch keine Bewertungen
- DC To DC Converter Circuits Using SG3524 (Buck, Boost Designs)Dokument5 SeitenDC To DC Converter Circuits Using SG3524 (Buck, Boost Designs)Branislav TanevskiNoch keine Bewertungen
- KTMICRODokument28 SeitenKTMICROthiago garofaloNoch keine Bewertungen
- 14nm - 16nm Processes PDFDokument1 Seite14nm - 16nm Processes PDFGagandeep Singh DhingraNoch keine Bewertungen