Das könnte Ihnen auch gefallen
- Dr. Alan Brown - Reengineering The Naval Ship Concept Design ProcessDokument12 SeitenDr. Alan Brown - Reengineering The Naval Ship Concept Design ProcessrizalramaNoch keine Bewertungen
- Optimum Risk Tanker (ORT)Dokument15 SeitenOptimum Risk Tanker (ORT)Sunil Kumar P GNoch keine Bewertungen
- Model-Driven Online Capacity Management for Component-Based Software SystemsVon EverandModel-Driven Online Capacity Management for Component-Based Software SystemsNoch keine Bewertungen
- Ship Design Optimization Considering Uncertainty: July 2010Dokument9 SeitenShip Design Optimization Considering Uncertainty: July 2010EmreNoch keine Bewertungen
- Optimal Design of 2 - and 3-Phase Separators A Mathematical Programming FormulationDokument16 SeitenOptimal Design of 2 - and 3-Phase Separators A Mathematical Programming FormulationGabriela Urdaneta100% (1)
- As Ne Manning Paper Rev 2Dokument27 SeitenAs Ne Manning Paper Rev 2alibaba1888Noch keine Bewertungen
- Cost-Effective Mission OperationsDokument11 SeitenCost-Effective Mission OperationsAhzam ZobairiNoch keine Bewertungen
- Optimal Design of Two and Three Phase Separators A Mathematical ProgrammingDokument16 SeitenOptimal Design of Two and Three Phase Separators A Mathematical ProgrammingVimal Raj SNoch keine Bewertungen
- The Design Space Root Finding Method For Efficient Risk Optimization by SimulationDokument12 SeitenThe Design Space Root Finding Method For Efficient Risk Optimization by SimulationRodrigo A Calvo ONoch keine Bewertungen
- Multi-Objective Optimization of Mooring Systems For Offshore Renewable EnergyDokument8 SeitenMulti-Objective Optimization of Mooring Systems For Offshore Renewable Energymih1Noch keine Bewertungen
- ICAS2012 Multidisciplinary Airframe Design OptimizationDokument14 SeitenICAS2012 Multidisciplinary Airframe Design OptimizationHua Hidari YangNoch keine Bewertungen
- Read 1Dokument13 SeitenRead 1Ghanendra DasNoch keine Bewertungen
- Why Cost Cutting Fails To Deliver: by J de VriesDokument6 SeitenWhy Cost Cutting Fails To Deliver: by J de VrieseisaacmaxNoch keine Bewertungen
- UNIT 2 - Elaboration Elaboration PhaseDokument26 SeitenUNIT 2 - Elaboration Elaboration PhaseAbi LashNoch keine Bewertungen
- The Architecture Tradeoff Analysis MethodDokument11 SeitenThe Architecture Tradeoff Analysis MethoducinfpracticasNoch keine Bewertungen
- Ooad UNIT 2 Notes PDFDokument26 SeitenOoad UNIT 2 Notes PDFVidhyaNoch keine Bewertungen
- Levels-of-A Pproximation Approach in Codes of Practice: Aurelio Muttoni, Miguel Fernández RuizDokument5 SeitenLevels-of-A Pproximation Approach in Codes of Practice: Aurelio Muttoni, Miguel Fernández RuizSaumya RanjanNoch keine Bewertungen
- A VAR: Computer Package Optimal Multi-Objective Planning in Large Scale Power SystemsDokument7 SeitenA VAR: Computer Package Optimal Multi-Objective Planning in Large Scale Power SystemsWilliam Paul MacherlaNoch keine Bewertungen
- 1 s2.0 S0378778802000713 MainDokument14 Seiten1 s2.0 S0378778802000713 MainPei LiuNoch keine Bewertungen
- Literature Survey MDO FrameworkDokument8 SeitenLiterature Survey MDO FrameworkKarthikeya SrivathsavNoch keine Bewertungen
- Multiobjective Turbine Engine Controller Design Using Genetic AlgorithmsDokument5 SeitenMultiobjective Turbine Engine Controller Design Using Genetic AlgorithmsrameshsmeNoch keine Bewertungen
- Optimization of Recloser Placement in DG-Enhanced Distribution Networks Using A Multi-Objective Optimization ApproachDokument6 SeitenOptimization of Recloser Placement in DG-Enhanced Distribution Networks Using A Multi-Objective Optimization Approachhamed farzinNoch keine Bewertungen
- Oil Tanker Cargo Hold Structural Optimization Using Ultimate Limit StatesDokument17 SeitenOil Tanker Cargo Hold Structural Optimization Using Ultimate Limit StatesFrancesco CauzNoch keine Bewertungen
- Evaluating Design MarginDokument5 SeitenEvaluating Design Marginra9622Noch keine Bewertungen
- Effective Performance Measurement and Analysis of Multithreaded Applications NathanDokument11 SeitenEffective Performance Measurement and Analysis of Multithreaded Applications Nathanapi-12797690Noch keine Bewertungen
- Mechanical Engineering DesignDokument11 SeitenMechanical Engineering DesignBoat KitjanatNoch keine Bewertungen
- Otc 2001Dokument72 SeitenOtc 2001JOSE LUIS GUTIERREZ GARCIANoch keine Bewertungen
- Conceptual Ship Design Framework For Designing New Commercial ShipsDokument8 SeitenConceptual Ship Design Framework For Designing New Commercial ShipsAhmed AdelNoch keine Bewertungen
- Cooperative Distributed Robust Trajectory Optimization Using Receding Horizon Milp, TCST.2010.2045501Dokument9 SeitenCooperative Distributed Robust Trajectory Optimization Using Receding Horizon Milp, TCST.2010.2045501Mehmed BrkićNoch keine Bewertungen
- Dimensional Management in Vehicle Development - Porsche Engineering Magazine 01-2013Dokument6 SeitenDimensional Management in Vehicle Development - Porsche Engineering Magazine 01-2013hanalltechNoch keine Bewertungen
- CostEvaluationOfAircraftSystems PDFDokument105 SeitenCostEvaluationOfAircraftSystems PDFcoralonsoNoch keine Bewertungen
- Master MeetingDokument7 SeitenMaster Meetinghamzaibrahmi91Noch keine Bewertungen
- Aerodynamic/Stealthy/Structural Multidisciplinary Design Optimization of Unmanned Combat Air VehicleDokument7 SeitenAerodynamic/Stealthy/Structural Multidisciplinary Design Optimization of Unmanned Combat Air Vehiclerusty41Noch keine Bewertungen
- Lecture 20: Design Strategy: 20.1process Overview & TestingDokument12 SeitenLecture 20: Design Strategy: 20.1process Overview & Testingstef_iosNoch keine Bewertungen
- Optimizing The Process Flow For Complex Design Projects: J.L. Rogers C.M. Mcculley C.L. BloebaumDokument12 SeitenOptimizing The Process Flow For Complex Design Projects: J.L. Rogers C.M. Mcculley C.L. BloebaumummanNoch keine Bewertungen
- CH 03Dokument72 SeitenCH 03Hatem Al-DowenyNoch keine Bewertungen
- Maintenance Scheduling of Generating Units in Electric Power SystemDokument7 SeitenMaintenance Scheduling of Generating Units in Electric Power SystemGirish MakwanaNoch keine Bewertungen
- Paper Title Name: Syed Abdul Wahab, DR - Mohd Hamraj, Abuzar EmamaiDokument22 SeitenPaper Title Name: Syed Abdul Wahab, DR - Mohd Hamraj, Abuzar EmamaiSYED ABDUL MOHI MUZZAMMILNoch keine Bewertungen
- DownloadDokument11 SeitenDownloadMehrshad GhasemabadiNoch keine Bewertungen
- C-MCTS: Safe Planning With Monte Carlo Tree Search: Preprint. Under ReviewDokument13 SeitenC-MCTS: Safe Planning With Monte Carlo Tree Search: Preprint. Under ReviewChet MehtaNoch keine Bewertungen
- An Index For Operational Flexibility in Chemical Process DesignDokument10 SeitenAn Index For Operational Flexibility in Chemical Process Designmauricio colomboNoch keine Bewertungen
- Design Optimization of Combined Piled Raft Foundations Considering UncertaintyDokument6 SeitenDesign Optimization of Combined Piled Raft Foundations Considering Uncertaintyjuan carlos molano toroNoch keine Bewertungen
- A Control-Theoretic Aid To Managing The Construction Phase in Incremental Software DevelopmentDokument3 SeitenA Control-Theoretic Aid To Managing The Construction Phase in Incremental Software DevelopmentdiduzopanNoch keine Bewertungen
- IQ Centric - 345 QuestionsDokument23 SeitenIQ Centric - 345 QuestionsravindersinghjohalNoch keine Bewertungen
- Software Architecture and DesignDokument25 SeitenSoftware Architecture and Designkoundinya7567% (3)
- (2014) Multiple Task Optimization Using Dynamical Movement Primitives For Whole-Body Reactive ControlDokument6 Seiten(2014) Multiple Task Optimization Using Dynamical Movement Primitives For Whole-Body Reactive ControlXiong LiNoch keine Bewertungen
- Load Balancing Mutation A Particle Swarm Optimization (LBMPSO) Based Schedule and Allocation For Cloud ComputingDokument7 SeitenLoad Balancing Mutation A Particle Swarm Optimization (LBMPSO) Based Schedule and Allocation For Cloud ComputingPranjal KumarNoch keine Bewertungen
- A Systematic Approach To Composing and Optimizing Application WorkflowsDokument9 SeitenA Systematic Approach To Composing and Optimizing Application WorkflowsLeo Kwee WahNoch keine Bewertungen
- Optimal Solution For Multi-Objective Facility Layout Problem Using Genetic AlgorithmDokument7 SeitenOptimal Solution For Multi-Objective Facility Layout Problem Using Genetic AlgorithmshubNoch keine Bewertungen
- Design Margins A Hidden Issue in IndustryDokument24 SeitenDesign Margins A Hidden Issue in Industryra9622Noch keine Bewertungen
- Chapter 1Dokument25 SeitenChapter 1chinmayNoch keine Bewertungen
- (2021) Reliability Based Multidisciplinary Design Optimization of An Underwater Vehicle Including Cost AnalysisDokument16 Seiten(2021) Reliability Based Multidisciplinary Design Optimization of An Underwater Vehicle Including Cost AnalysisJONATHAN JUSTINO APOS CASSIMIRONoch keine Bewertungen
- nwc21 352Dokument14 Seitennwc21 352gpb76Noch keine Bewertungen
- Chapter 1: Introduction: 1.1 What Is COCOMO?Dokument39 SeitenChapter 1: Introduction: 1.1 What Is COCOMO?Blue moon MediaNoch keine Bewertungen
- Reliability, Availability, and Maintainability: Probability Models For PopulationsDokument8 SeitenReliability, Availability, and Maintainability: Probability Models For PopulationsMani KumarNoch keine Bewertungen
- Path Planning For Autonomous Vehicles Driving Over Rough TerrainDokument6 SeitenPath Planning For Autonomous Vehicles Driving Over Rough TerrainkonstantizaharovNoch keine Bewertungen
- Nassaj, Lienig Et Al. 2009 - A New Methodology For Constraint-DrivenDokument4 SeitenNassaj, Lienig Et Al. 2009 - A New Methodology For Constraint-DrivensimNoch keine Bewertungen
- Complex-Systems Design Methodology For Systems-Engineering Collaborative EnvironmentDokument33 SeitenComplex-Systems Design Methodology For Systems-Engineering Collaborative EnvironmentwaseheNoch keine Bewertungen
- 610 SullivanDokument19 Seiten610 SullivanJhon GreigNoch keine Bewertungen
- Executive Summary Damen DOP DredgersDokument18 SeitenExecutive Summary Damen DOP DredgersJhon GreigNoch keine Bewertungen
- Basic Ship Design PhasesDokument1 SeiteBasic Ship Design PhasesJhon GreigNoch keine Bewertungen
- Product Sheet Damen Stan Lander 5612-12-2016Dokument2 SeitenProduct Sheet Damen Stan Lander 5612-12-2016Jhon GreigNoch keine Bewertungen
- Products Sheet Fast RoPax Ferry 5114-01-2015Dokument2 SeitenProducts Sheet Fast RoPax Ferry 5114-01-2015Jhon GreigNoch keine Bewertungen
- DAMEN Public Transport Brochure April 2013Dokument34 SeitenDAMEN Public Transport Brochure April 2013Jhon GreigNoch keine Bewertungen
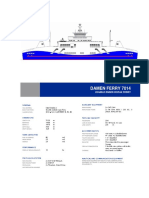
- Damen Ropax Ferry 7014 YN242496 DSDokument2 SeitenDamen Ropax Ferry 7014 YN242496 DSJhon GreigNoch keine Bewertungen
- Anchor Handling Tug Supplier 200 DSDokument2 SeitenAnchor Handling Tug Supplier 200 DSJhon GreigNoch keine Bewertungen
- Product Sheet Damen Accomodation Support Vessel 9020-02-2017Dokument2 SeitenProduct Sheet Damen Accomodation Support Vessel 9020-02-2017Jhon GreigNoch keine Bewertungen
- Damen Fast Ropax Ferry 4512 YN53015152 DSDokument2 SeitenDamen Fast Ropax Ferry 4512 YN53015152 DSJhon GreigNoch keine Bewertungen
- 710 Thin Fin Plastic Quick Change: Rodillo Plastico Fino de Cambio RapidoDokument1 Seite710 Thin Fin Plastic Quick Change: Rodillo Plastico Fino de Cambio RapidoJhon GreigNoch keine Bewertungen
- Buoy Laying Vessel 8317 YN554001 RelumeDokument2 SeitenBuoy Laying Vessel 8317 YN554001 RelumeJhon GreigNoch keine Bewertungen
- Air Bag Launching SystemsDokument7 SeitenAir Bag Launching SystemsJhon GreigNoch keine Bewertungen
- Hull Data (With Appendages)Dokument2 SeitenHull Data (With Appendages)Jhon GreigNoch keine Bewertungen
- List of Shipbuilders and ShipyardsDokument21 SeitenList of Shipbuilders and ShipyardsJhon GreigNoch keine Bewertungen
- 911 - Catalogue PDFDokument81 Seiten911 - Catalogue PDFJhon GreigNoch keine Bewertungen
- Contents (2013 - 10 - 27 16 - 26 - 15 UTC)Dokument8 SeitenContents (2013 - 10 - 27 16 - 26 - 15 UTC)Jhon GreigNoch keine Bewertungen
- NYK RoRo Is Leading in More Ways Than OneDokument5 SeitenNYK RoRo Is Leading in More Ways Than OneJhon GreigNoch keine Bewertungen
- STD Thesis PDFDokument143 SeitenSTD Thesis PDFCherukuri KotilingaiahNoch keine Bewertungen
- The Future of Process Plant DesignDokument7 SeitenThe Future of Process Plant DesignMaríaAlejandraMoralesNoch keine Bewertungen
- Play For All: The Newest Developments in Universal Design, Accessibility and Inclusion in PlaygroundsDokument20 SeitenPlay For All: The Newest Developments in Universal Design, Accessibility and Inclusion in PlaygroundsNan DelgadoNoch keine Bewertungen
- Chapter 3 Training DesignDokument15 SeitenChapter 3 Training Designvijay kumarNoch keine Bewertungen
- Learning Activity Sheet Quarter 3 Grade 9 TLE - Electrical Installation and Maintenance (EIM)Dokument21 SeitenLearning Activity Sheet Quarter 3 Grade 9 TLE - Electrical Installation and Maintenance (EIM)Jenn Hazel Fameronag100% (8)
- 5 Types of SMEsDokument5 Seiten5 Types of SMEsDafina ShalaNoch keine Bewertungen
- Hfe Pioneer m-73 ServiceDokument29 SeitenHfe Pioneer m-73 ServiceEletrônica UniversalNoch keine Bewertungen
- Ayokunnumi CV.Dokument3 SeitenAyokunnumi CV.kunnumiNoch keine Bewertungen
- Engineering Design Resolution & Design Principles: © 2007 Pearson Education, Inc. Publishing As Pearson Addison-WesleyDokument22 SeitenEngineering Design Resolution & Design Principles: © 2007 Pearson Education, Inc. Publishing As Pearson Addison-WesleyNinna Aldchiko Alva IINoch keine Bewertungen
- CSS3 PDFDokument5 SeitenCSS3 PDFMdv PrasadNoch keine Bewertungen
- Design PortfolioDokument41 SeitenDesign PortfolioAnonymous OeDZDMNoch keine Bewertungen
- Lecture 2Dokument9 SeitenLecture 2amrsalah40820Noch keine Bewertungen
- Creativity and Innovation: Basic Concepts and Approaches: Min TangDokument30 SeitenCreativity and Innovation: Basic Concepts and Approaches: Min TangNishi JangirNoch keine Bewertungen
- SSD4 Unit1Dokument175 SeitenSSD4 Unit1api-3728126100% (1)
- Basic FPGA Tutorial Vivado VHDL-2022.2Dokument249 SeitenBasic FPGA Tutorial Vivado VHDL-2022.2Salim HajjiNoch keine Bewertungen
- Chapter: Architecture & User Interface DesignDokument26 SeitenChapter: Architecture & User Interface DesignJaher WasimNoch keine Bewertungen
- Pelaez Gabriella M5A1Dokument3 SeitenPelaez Gabriella M5A1Gabriella PelaezNoch keine Bewertungen
- Atria University Beyonder Summer School 2024 Brochure - CompressedDokument24 SeitenAtria University Beyonder Summer School 2024 Brochure - CompressedJiyaNoch keine Bewertungen
- PgditDokument12 SeitenPgditjprernaNoch keine Bewertungen
- ArchiCAD Step by Step TutorialDokument264 SeitenArchiCAD Step by Step TutorialAryana Budiman100% (3)
- PT. Indofood Sukses Makmur, TBK - Divisi Bogasari Pabrik JakartaDokument3 SeitenPT. Indofood Sukses Makmur, TBK - Divisi Bogasari Pabrik JakartaSuryadi YadiNoch keine Bewertungen
- Criteria or Rubric: For The Set of Blueprints of Your Design Criteria 4 3 2 1Dokument2 SeitenCriteria or Rubric: For The Set of Blueprints of Your Design Criteria 4 3 2 1Sheryl G. PadrigoNoch keine Bewertungen
- Water FountainDokument13 SeitenWater Fountaingarych72Noch keine Bewertungen
- African Village Project AismDokument4 SeitenAfrican Village Project Aismapi-260994888Noch keine Bewertungen
- Modesto TextDokument7 SeitenModesto TextBuddha DeejayNoch keine Bewertungen
- Hoa 2 Modernism PDFDokument38 SeitenHoa 2 Modernism PDFArlene Joy G. ValentinNoch keine Bewertungen
- Drawing and Painting Syllabus Fall 16Dokument6 SeitenDrawing and Painting Syllabus Fall 16api-249573286Noch keine Bewertungen
- City Buildings Business PowerPoint TemplateDokument36 SeitenCity Buildings Business PowerPoint Template黃英婷Noch keine Bewertungen
- The Irwin S. Chanin School of Architecture: Mission StatementDokument15 SeitenThe Irwin S. Chanin School of Architecture: Mission StatementKjMmtNoch keine Bewertungen
- A Narrative Theory of GamesDokument6 SeitenA Narrative Theory of GamesAbraham LepeNoch keine Bewertungen
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Von EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Bewertung: 4 von 5 Sternen4/5 (3)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsVon EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNoch keine Bewertungen
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureVon EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureBewertung: 4.5 von 5 Sternen4.5/5 (2)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- Arduino: The ultimate Arduino guide for beginners, including Arduino programming, Arduino cookbook, tips, tricks, and more!Von EverandArduino: The ultimate Arduino guide for beginners, including Arduino programming, Arduino cookbook, tips, tricks, and more!Bewertung: 3 von 5 Sternen3/5 (1)
- SAM: One Robot, a Dozen Engineers, and the Race to Revolutionize the Way We BuildVon EverandSAM: One Robot, a Dozen Engineers, and the Race to Revolutionize the Way We BuildBewertung: 5 von 5 Sternen5/5 (5)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Von EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Bewertung: 4 von 5 Sternen4/5 (5)
- DIY Drones for the Evil Genius: Design, Build, and Customize Your Own DronesVon EverandDIY Drones for the Evil Genius: Design, Build, and Customize Your Own DronesBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Medical and Healthcare Robotics: New Paradigms and Recent AdvancesVon EverandMedical and Healthcare Robotics: New Paradigms and Recent AdvancesOlfa BoubakerNoch keine Bewertungen
- A Welder’s Handbook to Robotic ProgrammingVon EverandA Welder’s Handbook to Robotic ProgrammingBewertung: 5 von 5 Sternen5/5 (3)
- Building with Virtual LEGO: Getting Started with LEGO Digital Designer, LDraw, and MecabricksVon EverandBuilding with Virtual LEGO: Getting Started with LEGO Digital Designer, LDraw, and MecabricksNoch keine Bewertungen
- Digital Twin Development and Deployment on the Cloud: Developing Cloud-Friendly Dynamic Models Using Simulink®/SimscapeTM and Amazon AWSVon EverandDigital Twin Development and Deployment on the Cloud: Developing Cloud-Friendly Dynamic Models Using Simulink®/SimscapeTM and Amazon AWSNoch keine Bewertungen
- Practical Robotics in C++: Build and Program Real Autonomous Robots Using Raspberry Pi (English Edition)Von EverandPractical Robotics in C++: Build and Program Real Autonomous Robots Using Raspberry Pi (English Edition)Noch keine Bewertungen
- The AI Generation: Shaping Our Global Future with Thinking MachinesVon EverandThe AI Generation: Shaping Our Global Future with Thinking MachinesBewertung: 4 von 5 Sternen4/5 (2)
- Practical E-Manufacturing and Supply Chain ManagementVon EverandPractical E-Manufacturing and Supply Chain ManagementBewertung: 3.5 von 5 Sternen3.5/5 (4)
- Artificial Intelligence: Machine Learning, Deep Learning, and Automation ProcessesVon EverandArtificial Intelligence: Machine Learning, Deep Learning, and Automation ProcessesBewertung: 5 von 5 Sternen5/5 (2)
- Atlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceVon EverandAtlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceBewertung: 5 von 5 Sternen5/5 (9)
- Artificial Intelligence: From Medieval Robots to Neural NetworksVon EverandArtificial Intelligence: From Medieval Robots to Neural NetworksBewertung: 4 von 5 Sternen4/5 (4)
- Artificial You: AI and the Future of Your MindVon EverandArtificial You: AI and the Future of Your MindBewertung: 4 von 5 Sternen4/5 (3)