Das könnte Ihnen auch gefallen
- 7 - Lecture 7 - Pulse Transfer Function & ZOH Transfer Function - (2nd Term 2021-2022)Dokument16 Seiten7 - Lecture 7 - Pulse Transfer Function & ZOH Transfer Function - (2nd Term 2021-2022)Artist AbramNoch keine Bewertungen
- FLab-08 EXP8Dokument8 SeitenFLab-08 EXP8Carl Kevin CartijanoNoch keine Bewertungen
- Exp01 EEE318Dokument7 SeitenExp01 EEE318Abid AbdullahNoch keine Bewertungen
- Transfer Function - Poles and Zeros - StabilityDokument9 SeitenTransfer Function - Poles and Zeros - Stability666667Noch keine Bewertungen
- Lab3 2Dokument49 SeitenLab3 2علاء الدين العولقيNoch keine Bewertungen
- AF 2 Repaso de Sistemas LTI ADokument8 SeitenAF 2 Repaso de Sistemas LTI APedro BalderasNoch keine Bewertungen
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Dokument183 SeitenControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Anik PaulNoch keine Bewertungen
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFDokument183 SeitenControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- Module 2 - Lecture 3Dokument31 SeitenModule 2 - Lecture 3lvrevathiNoch keine Bewertungen
- Feedback Systems QuestionsDokument2 SeitenFeedback Systems QuestionsutkanpazarNoch keine Bewertungen
- Homework 4Dokument3 SeitenHomework 4as739562978Noch keine Bewertungen
- Time Domain Analysis of SignalsDokument19 SeitenTime Domain Analysis of SignalsshashankifNoch keine Bewertungen
- Sensors and Signals Theory Handbook Week 4 Section 2.1Dokument12 SeitenSensors and Signals Theory Handbook Week 4 Section 2.1jonahNoch keine Bewertungen
- 3 Discrete Time SystemsDokument40 Seiten3 Discrete Time SystemsNur Razanah Mohd YasinNoch keine Bewertungen
- Lecture 2Dokument107 SeitenLecture 2Nowrin JawedNoch keine Bewertungen
- Lab 06 PDFDokument7 SeitenLab 06 PDFAbdul Rehman AfzalNoch keine Bewertungen
- CE Lab Manual (Exp 4)Dokument4 SeitenCE Lab Manual (Exp 4)Farzan NabeelNoch keine Bewertungen
- Thuật Toán Điều Khiển1Dokument23 SeitenThuật Toán Điều Khiển1Văn Nghĩa NguyễnNoch keine Bewertungen
- Lab6 - System Analysis (2) - 14-05-2018Dokument31 SeitenLab6 - System Analysis (2) - 14-05-2018Eng. Ibrahim Abdullah AlruhmiNoch keine Bewertungen
- Unit 2 Control SystemDokument75 SeitenUnit 2 Control SystemGirish Shankar MishraNoch keine Bewertungen
- (Solution) : Final Examination Semester I SESSION 2009/2010Dokument12 Seiten(Solution) : Final Examination Semester I SESSION 2009/2010marwanNoch keine Bewertungen
- Control TutorialsDokument3 SeitenControl TutorialsDipesh PanditNoch keine Bewertungen
- Discrete Time SystemsDokument151 SeitenDiscrete Time Systemsdoaah hakim100% (1)
- Lab 1&2 LcsDokument13 SeitenLab 1&2 LcsMoiz SiddiquiNoch keine Bewertungen
- Q1: Put The Sign For Right Sentences and The Sign X For Wrong SentencesDokument18 SeitenQ1: Put The Sign For Right Sentences and The Sign X For Wrong SentencesWaleed HåšhįmNoch keine Bewertungen
- ELE 4623: Control Systems: Faculty of Engineering TechnologyDokument16 SeitenELE 4623: Control Systems: Faculty of Engineering TechnologyMaitha SaeedNoch keine Bewertungen
- Funda MIMODokument69 SeitenFunda MIMOኪዳንኪ ማርያም ዘኢየሀልቅNoch keine Bewertungen
- Nonlinear Control Feedback Linearization Sliding Mode ControlVon EverandNonlinear Control Feedback Linearization Sliding Mode ControlNoch keine Bewertungen
- Funda of Multivariable ControlDokument69 SeitenFunda of Multivariable Controlኪዳንኪ ማርያም ዘኢየሀልቅNoch keine Bewertungen
- Digital Signal Processing Practical 2Dokument8 SeitenDigital Signal Processing Practical 2ravisankarmurugan217Noch keine Bewertungen
- Topic 5 Transfer Function Approach To Modeling Dynamic SystemsDokument49 SeitenTopic 5 Transfer Function Approach To Modeling Dynamic Systemswenfang lee0% (1)
- Modeling, Simulation and Control of A Robotic Arm PDFDokument7 SeitenModeling, Simulation and Control of A Robotic Arm PDFshivaramreddyNoch keine Bewertungen
- Modeling, Simulation and Control of A Robotic ArmDokument7 SeitenModeling, Simulation and Control of A Robotic ArmaseptaNoch keine Bewertungen
- Rajshahi University of Engineering & Technology: Signals and Linear SystemsDokument14 SeitenRajshahi University of Engineering & Technology: Signals and Linear SystemsMd Shahadat HossainNoch keine Bewertungen
- Lecture 2Dokument43 SeitenLecture 2Dimuth S. PeirisNoch keine Bewertungen
- LTI SystemsDokument75 SeitenLTI SystemsRoob HoodNoch keine Bewertungen
- Module 002 Feedback and Control SystemsDokument15 SeitenModule 002 Feedback and Control SystemsPexianNoch keine Bewertungen
- Small Signal Staibili Studies On Wetsern Region NetworkDokument10 SeitenSmall Signal Staibili Studies On Wetsern Region NetworkSaugato MondalNoch keine Bewertungen
- Navtej Mishra 19116043: Experiment - 1: Study of Linear-Time-Invariant Open-Loop Systems and Their RepresentationsDokument24 SeitenNavtej Mishra 19116043: Experiment - 1: Study of Linear-Time-Invariant Open-Loop Systems and Their RepresentationsNavtej MishraNoch keine Bewertungen
- Microsoft PowerPoint - Lecture1 DSK - Modeling Rev.08.09.2014Dokument55 SeitenMicrosoft PowerPoint - Lecture1 DSK - Modeling Rev.08.09.2014Syahrul RamdaniNoch keine Bewertungen
- Lec07-12 - CT SystemsDokument72 SeitenLec07-12 - CT SystemsDaniya AbbasiNoch keine Bewertungen
- Mechanical Vibration PDFDokument152 SeitenMechanical Vibration PDFTiago Rodrigues Dos SantosNoch keine Bewertungen
- Optimal Fuzzy Sliding Mode Control AlgorDokument7 SeitenOptimal Fuzzy Sliding Mode Control AlgorHildebrando CastroNoch keine Bewertungen
- Implementing Motion Markov Detection On General Purpose Processor and Associative MeshDokument6 SeitenImplementing Motion Markov Detection On General Purpose Processor and Associative MeshTuan NguyenNoch keine Bewertungen
- Module 002 Block Diagram Algebra and Transfer Function: Frequency Domain ModelingDokument16 SeitenModule 002 Block Diagram Algebra and Transfer Function: Frequency Domain ModelingDiane GutierrezNoch keine Bewertungen
- Lab 4Dokument4 SeitenLab 4HiNoch keine Bewertungen
- Experiment No.1 I DSP TMS320C6713 DSK & O DT & Matlab: Lab Manual EEE324 Digital Signal ProcessingDokument14 SeitenExperiment No.1 I DSP TMS320C6713 DSK & O DT & Matlab: Lab Manual EEE324 Digital Signal ProcessingMirza Riyasat AliNoch keine Bewertungen
- Lab 3: Difference Equations, Z-Transform, Pole-Zero Diagrams, BIBO Stability and Quantization EffectsDokument5 SeitenLab 3: Difference Equations, Z-Transform, Pole-Zero Diagrams, BIBO Stability and Quantization EffectsJane MoujaessNoch keine Bewertungen
- 4-Transfer Function and Modeling of Mechanical SystemDokument35 Seiten4-Transfer Function and Modeling of Mechanical SystemUsama KaleemNoch keine Bewertungen
- Chapter - 5 - Part2 - DT Signals & SystemsDokument51 SeitenChapter - 5 - Part2 - DT Signals & SystemsReddy BabuNoch keine Bewertungen
- Laboratory Report On Digital Signal Processing Laboratory (EC-3096) Spring - 2023Dokument7 SeitenLaboratory Report On Digital Signal Processing Laboratory (EC-3096) Spring - 2023Anjishnu BhzttacharyaNoch keine Bewertungen
- Lecture 2Dokument47 SeitenLecture 2Houssam moussaNoch keine Bewertungen
- Acs 2018s2 Assn1Dokument4 SeitenAcs 2018s2 Assn1MiraelNoch keine Bewertungen
- Automatic Control-Chapter2 - ModelingFrequencyDokument24 SeitenAutomatic Control-Chapter2 - ModelingFrequencyFiras Abu talebNoch keine Bewertungen
- Manual - Control System LabDokument20 SeitenManual - Control System LabRanjan mishraNoch keine Bewertungen
- Enee 660 HW #7Dokument2 SeitenEnee 660 HW #7PeacefulLion0% (1)
- DSP Important MaterialDokument209 SeitenDSP Important Materialssabinayaa12Noch keine Bewertungen
- Assignment 2Dokument3 SeitenAssignment 2tanushka17823Noch keine Bewertungen
- Hussaini GroomDokument19 SeitenHussaini GroomIslamic LibraryNoch keine Bewertungen
- Employee Information PerformaeDokument2 SeitenEmployee Information PerformaeSuperbVoiceNoch keine Bewertungen
- Atmel 2549 8 Bit AVR Microcontroller ATmega640 1280 1281 2560 2561 DatasheetDokument435 SeitenAtmel 2549 8 Bit AVR Microcontroller ATmega640 1280 1281 2560 2561 Datasheetpototo1234567Noch keine Bewertungen
- Geothermal Energy 1Dokument8 SeitenGeothermal Energy 1SuperbVoiceNoch keine Bewertungen
- Solar Thermal Collectors and Application: Shunpei Iguchi James DuncanDokument36 SeitenSolar Thermal Collectors and Application: Shunpei Iguchi James DuncanSuperbVoiceNoch keine Bewertungen
- GRID Integration of Renewable Energy SourcesDokument9 SeitenGRID Integration of Renewable Energy SourcesmanasasurendraNoch keine Bewertungen
- Order - 57 Confined Space ProcedureDokument38 SeitenOrder - 57 Confined Space ProcedureJay PrasanthNoch keine Bewertungen
- Plantech Industries Company Deck v1Dokument19 SeitenPlantech Industries Company Deck v1Nemanja RadićNoch keine Bewertungen
- Solved Problem - Critical Path MethodDokument6 SeitenSolved Problem - Critical Path MethoddyingasNoch keine Bewertungen
- Maxtest SoftwareDokument47 SeitenMaxtest SoftwareGMAR Comercializadora100% (1)
- ESA-ESTL-TM-0065 01 - New Cage Designs - Ball Riding CagesDokument44 SeitenESA-ESTL-TM-0065 01 - New Cage Designs - Ball Riding CagesAnonymous lEX5U51wOANoch keine Bewertungen
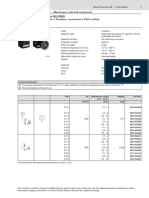
- Pressure Regulator, Series NL2-RGSDokument3 SeitenPressure Regulator, Series NL2-RGSHuynh Duc TriNoch keine Bewertungen
- Callyn Naidoo - Networks 511 AssigmentDokument8 SeitenCallyn Naidoo - Networks 511 AssigmentDeep InsanityxNoch keine Bewertungen
- Termux Tutorial Complete Termux Commands - CodeDokument3 SeitenTermux Tutorial Complete Termux Commands - CodeDavid Burkhouse100% (4)
- Frequency Assignment and Interference AnalysisDokument60 SeitenFrequency Assignment and Interference AnalysisDomagoj Domo KutleNoch keine Bewertungen
- Ml3.3.1J Drilling ProcDokument19 SeitenMl3.3.1J Drilling ProcthaohanuvnNoch keine Bewertungen
- проф англDokument27 Seitenпроф англVeneraNoch keine Bewertungen
- Generator Set: Prime PowerDokument4 SeitenGenerator Set: Prime PowerEmerzon HMNoch keine Bewertungen
- Om520 Manual enDokument36 SeitenOm520 Manual enDhian Permadi WibowoNoch keine Bewertungen
- STQADokument54 SeitenSTQADisha BhardwajNoch keine Bewertungen
- Firewall Essentials (EDU-210)Dokument1 SeiteFirewall Essentials (EDU-210)Partha Sarathi NandiNoch keine Bewertungen
- New Aqua Calibration CertificateDokument20 SeitenNew Aqua Calibration Certificateahmed mohamedNoch keine Bewertungen
- Lecture Notes - Week 2Dokument13 SeitenLecture Notes - Week 2Nathaniel LucasNoch keine Bewertungen
- Germany - TR6 - Rev 9 - Belegexemplar - ENDokument52 SeitenGermany - TR6 - Rev 9 - Belegexemplar - ENHéctor LodosoNoch keine Bewertungen
- RIXL UserManualDokument29 SeitenRIXL UserManualPeela NaveenNoch keine Bewertungen
- ISO 26262-10-2012-Road Vehicles Functional Safety Guideline On ISO 26262Dokument100 SeitenISO 26262-10-2012-Road Vehicles Functional Safety Guideline On ISO 26262Cycy Hm100% (1)
- Itec 101Dokument3 SeitenItec 101ChaseNoch keine Bewertungen
- Mpls Lab 2 - Mpls VRF VpnsDokument13 SeitenMpls Lab 2 - Mpls VRF VpnsSo ManiNoch keine Bewertungen
- Finals Living in The IT EraDokument2 SeitenFinals Living in The IT EraLopez AeraNoch keine Bewertungen
- Modern Accounting How To Overcome Financial Close ChallengesDokument26 SeitenModern Accounting How To Overcome Financial Close ChallengesGracie BautistaNoch keine Bewertungen
- Item StockDokument50 SeitenItem StockRizki AmrullahNoch keine Bewertungen
- Vashi Nedomansky - Quick Course - July72020Dokument69 SeitenVashi Nedomansky - Quick Course - July72020Rogelio DiazNoch keine Bewertungen
- Real Life Startup Pitch DeckDokument55 SeitenReal Life Startup Pitch DeckWalter TenecotaNoch keine Bewertungen
- 31 1 141 5 Electronics MathDokument398 Seiten31 1 141 5 Electronics MathEric RuethNoch keine Bewertungen
- RAPORT CE Dec 2019 - Renovarea Cladirilor in UEDokument89 SeitenRAPORT CE Dec 2019 - Renovarea Cladirilor in UETroi LauraNoch keine Bewertungen