Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Ouranos RiteDokument5 SeitenThe Ouranos RiteliebofreakNoch keine Bewertungen
- 164268ae HiPAP 500 and 350 Product DescriptionDokument81 Seiten164268ae HiPAP 500 and 350 Product DescriptionGleison PrateadoNoch keine Bewertungen
- 10 Makara LagnaDokument14 Seiten10 Makara LagnaRajeswara Rao Nidasanametla100% (1)
- Algorithms Notes For ProfessionalsDokument252 SeitenAlgorithms Notes For ProfessionalsJin100% (1)
- Accuracy Standards: and ISOIDokument4 SeitenAccuracy Standards: and ISOIali_yy2003100% (1)
- Ielts Reading Test 10 - QuestionsDokument5 SeitenIelts Reading Test 10 - QuestionsĐinh Quốc LiêmNoch keine Bewertungen
- Stochastic ProgrammingDokument315 SeitenStochastic Programmingfeiying1980100% (1)
- 2nd Grading Examniation in MathDokument3 Seiten2nd Grading Examniation in MathearnestNoch keine Bewertungen
- EivaSoftware 2007newDokument18 SeitenEivaSoftware 2007newGleison PrateadoNoch keine Bewertungen
- Glor - Io Wall HackDokument889 SeitenGlor - Io Wall HackAnonymous z3tLNO0TqH50% (8)
- Aquadopp ManualDokument60 SeitenAquadopp ManualGleison PrateadoNoch keine Bewertungen
- Ic199a R3Dokument1 SeiteIc199a R3Gleison PrateadoNoch keine Bewertungen
- Echnical Anual: CDL Minirlg Manual V1.03 Page 1 of 24Dokument24 SeitenEchnical Anual: CDL Minirlg Manual V1.03 Page 1 of 24Gleison PrateadoNoch keine Bewertungen
- The Most Advanced Real Time 3D Sonar in The World: /echoscopeDokument2 SeitenThe Most Advanced Real Time 3D Sonar in The World: /echoscopeGleison PrateadoNoch keine Bewertungen
- Operating Manual WLR 7 & 8: AanderaaDokument56 SeitenOperating Manual WLR 7 & 8: AanderaaGleison PrateadoNoch keine Bewertungen
- Nmea Data Strings Output SentencesDokument64 SeitenNmea Data Strings Output SentencesGleison PrateadoNoch keine Bewertungen
- Teledyne PDS System RequirementsDokument3 SeitenTeledyne PDS System RequirementsGleison PrateadoNoch keine Bewertungen
- Teledyne PDS System RequirementsDokument3 SeitenTeledyne PDS System RequirementsGleison PrateadoNoch keine Bewertungen
- Teledyne PDS LiteView Release NotesDokument8 SeitenTeledyne PDS LiteView Release NotesGleison PrateadoNoch keine Bewertungen
- Cygnus 2 Manual V617ADokument32 SeitenCygnus 2 Manual V617AGleison PrateadoNoch keine Bewertungen
- VERIPOS Global Coverage Chart - 120516Dokument1 SeiteVERIPOS Global Coverage Chart - 120516Gleison PrateadoNoch keine Bewertungen
- SDP-21 Upgrade To Latest Generation of DP SystemDokument2 SeitenSDP-21 Upgrade To Latest Generation of DP SystemGleison PrateadoNoch keine Bewertungen
- 200 Series ManualDokument38 Seiten200 Series ManualGleison PrateadoNoch keine Bewertungen
- Safety Information For Transponder and Transponder BatteryDokument24 SeitenSafety Information For Transponder and Transponder BatteryGleison PrateadoNoch keine Bewertungen
- SDP-21 Upgrade To Latest Generation of DP SystemDokument2 SeitenSDP-21 Upgrade To Latest Generation of DP SystemGleison PrateadoNoch keine Bewertungen
- VERIPOS North American Coverage Chart - 120516Dokument1 SeiteVERIPOS North American Coverage Chart - 120516Gleison PrateadoNoch keine Bewertungen
- VERIPOS Immarsat Coverage Chart - 120516Dokument1 SeiteVERIPOS Immarsat Coverage Chart - 120516Gleison PrateadoNoch keine Bewertungen
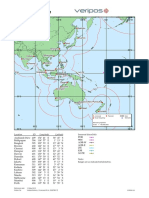
- DGPS Coverage Chart: Location ID Longitude Latitude Inmarsat DownlinksDokument1 SeiteDGPS Coverage Chart: Location ID Longitude Latitude Inmarsat DownlinksGleison PrateadoNoch keine Bewertungen
- 5 NopauseDokument95 Seiten5 NopauseLA garnerNoch keine Bewertungen
- Cyclotron List 2007 - FullDokument127 SeitenCyclotron List 2007 - FullJaswinder SidhuNoch keine Bewertungen
- r050210803 Chemical Process CalculationsDokument8 Seitenr050210803 Chemical Process CalculationsSrinivasa Rao GNoch keine Bewertungen
- Computer Graphics Lab Introduction To Opengl and Glut PrerequisitesDokument6 SeitenComputer Graphics Lab Introduction To Opengl and Glut PrerequisitesNourhan M. NahnoushNoch keine Bewertungen
- BK Gdan 000768Dokument5 SeitenBK Gdan 000768azisridwansyahNoch keine Bewertungen
- Risk Matrix Going On African Photo SafariDokument15 SeitenRisk Matrix Going On African Photo SafariScribdTranslationsNoch keine Bewertungen
- MSO EnglishDokument8 SeitenMSO EnglishAgautam Agagan100% (1)
- Deloitte Sample PapersDokument8 SeitenDeloitte Sample PapersAjay kumar TNPNoch keine Bewertungen
- Status Report Cbms 2020Dokument20 SeitenStatus Report Cbms 2020Lilian Belen Dela CruzNoch keine Bewertungen
- E-Cell DSCOE IIT Bombay - 2018 19Dokument12 SeitenE-Cell DSCOE IIT Bombay - 2018 19abhiNoch keine Bewertungen
- Comparative Law Comparative Jurisprudence Comparative LegislationDokument5 SeitenComparative Law Comparative Jurisprudence Comparative LegislationShubhamSudhirSrivastavaNoch keine Bewertungen
- Legal Education and ResearchDokument279 SeitenLegal Education and Researchsemarang100% (1)
- Current Trends On Syllabus Design PDFDokument5 SeitenCurrent Trends On Syllabus Design PDFBosque AgujasNoch keine Bewertungen
- Learning Plan FinalDokument3 SeitenLearning Plan FinalMary AnalynNoch keine Bewertungen
- Master Syllabus Fix TOM-JAN2019-BOED PDFDokument4 SeitenMaster Syllabus Fix TOM-JAN2019-BOED PDFBogiNoch keine Bewertungen
- Assessing Reading WordDokument3 SeitenAssessing Reading WordthresiliaNoch keine Bewertungen
- MOP QuizDokument2 SeitenMOP QuizJude MagbanuaNoch keine Bewertungen
- S3 4 SEMM21 22 Understanding Sports FansDokument98 SeitenS3 4 SEMM21 22 Understanding Sports FansAj StylesNoch keine Bewertungen
- VBH - Pull Handle - FramelessDokument10 SeitenVBH - Pull Handle - FramelessgoreechongNoch keine Bewertungen
- Siwes Report CHISOM SAM ORJIDokument41 SeitenSiwes Report CHISOM SAM ORJISOMSKI1100% (2)
- Quality of CG and Its Determinants Empirical Evidence From Listed Banks of BangladeshDokument24 SeitenQuality of CG and Its Determinants Empirical Evidence From Listed Banks of BangladeshShahebZadaAshikNoch keine Bewertungen
- Data ModelingDokument98 SeitenData ModelingparthascNoch keine Bewertungen