Das könnte Ihnen auch gefallen
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Von EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Noch keine Bewertungen
- 27 - AP Transco - Sub Engineer Model Papers PDFDokument42 Seiten27 - AP Transco - Sub Engineer Model Papers PDFsuryaNoch keine Bewertungen
- Boolean Circuit Rewiring: Bridging Logical and Physical DesignsVon EverandBoolean Circuit Rewiring: Bridging Logical and Physical DesignsNoch keine Bewertungen
- Sree Venkateswara College of Engineering Coe Bits For Iii Btech - Ii Sem Electrical MeasurementsDokument9 SeitenSree Venkateswara College of Engineering Coe Bits For Iii Btech - Ii Sem Electrical MeasurementsNaveen Kumar PNoch keine Bewertungen
- Characteristic Modes: Theory and Applications in Antenna EngineeringVon EverandCharacteristic Modes: Theory and Applications in Antenna EngineeringNoch keine Bewertungen
- P.V.K.K. Institute of Technology:: ANANTHAPURAMUDokument1 SeiteP.V.K.K. Institute of Technology:: ANANTHAPURAMUsai krishnaNoch keine Bewertungen
- Electrical Machine MCQDokument56 SeitenElectrical Machine MCQmohammedalatawi66Noch keine Bewertungen
- Electricity in Fish Research and Management: Theory and PracticeVon EverandElectricity in Fish Research and Management: Theory and PracticeNoch keine Bewertungen
- D. C. Machines 2Dokument10 SeitenD. C. Machines 2md.rokonu ZzamanNoch keine Bewertungen
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesVon EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesNoch keine Bewertungen
- Alternator MCQ PDF DownloadDokument38 SeitenAlternator MCQ PDF DownloadhaiderNoch keine Bewertungen
- Wavelet Analysis and Transient Signal Processing Applications for Power SystemsVon EverandWavelet Analysis and Transient Signal Processing Applications for Power SystemsNoch keine Bewertungen
- TA02 Electrical Set A PDFDokument15 SeitenTA02 Electrical Set A PDFumaira arifNoch keine Bewertungen
- Multi Choise DC Machine PDFDokument25 SeitenMulti Choise DC Machine PDFAbdulbasitHamzaNoch keine Bewertungen
- EE Page 1 of 12Dokument12 SeitenEE Page 1 of 12pNoch keine Bewertungen
- Machine QuizDokument2 SeitenMachine QuizAnkit SrivastavaNoch keine Bewertungen
- Comprehenisve Viva Bits-Electrical Machines 1 & 2Dokument16 SeitenComprehenisve Viva Bits-Electrical Machines 1 & 2Kavya ShettyNoch keine Bewertungen
- Question Booklet of Basic Electrical and Electronics EngineeringDokument12 SeitenQuestion Booklet of Basic Electrical and Electronics Engineeringakashbanerjee2779Noch keine Bewertungen
- Mid - Ii: Objective Type & Essay Questions With KeyDokument8 SeitenMid - Ii: Objective Type & Essay Questions With Keyduddala1srikanthNoch keine Bewertungen
- 2 Synchronous Generator WithansDokument19 Seiten2 Synchronous Generator WithansIncst Bhai0% (1)
- Pattern of Question, Syllabus & Probable Q & A of The Exam. For Assistant Engineer (Electrical) Through PSCDokument1 SeitePattern of Question, Syllabus & Probable Q & A of The Exam. For Assistant Engineer (Electrical) Through PSCSudip MondalNoch keine Bewertungen
- HT TP: //qpa Pe R.W But .Ac .In: Basic Electrical EngineeringDokument4 SeitenHT TP: //qpa Pe R.W But .Ac .In: Basic Electrical EngineeringKaushalNoch keine Bewertungen
- Power Electronics Solved Objective Questions Asked in Competitive ExamsDokument15 SeitenPower Electronics Solved Objective Questions Asked in Competitive ExamsNarasimman DonNoch keine Bewertungen
- Synchronous Motor McqsDokument93 SeitenSynchronous Motor McqsDineshNoch keine Bewertungen
- Quiz 1 Eee111Dokument3 SeitenQuiz 1 Eee111thirumalai22Noch keine Bewertungen
- MCQ of Electrical MachinesDokument78 SeitenMCQ of Electrical Machineskibrom atsbhaNoch keine Bewertungen
- UPDA Exam Sample QuesDokument63 SeitenUPDA Exam Sample QuesPrakash Panneerselvam89% (9)
- 2010 MachinesDokument3 Seiten2010 MachinespjnarjinaryNoch keine Bewertungen
- (A) Unity P.FDokument4 Seiten(A) Unity P.FAnurag BansalNoch keine Bewertungen
- DC GeneratorDokument16 SeitenDC GeneratorSiddique MuhammadNoch keine Bewertungen
- Electrical Machines Multiple Choice QuestionDokument4 SeitenElectrical Machines Multiple Choice Questiongopi_905100% (2)
- Electrical Engineering - Electrical MachinesDokument78 SeitenElectrical Engineering - Electrical MachinesSangeetha Veera0% (1)
- Question Bank EeeDokument12 SeitenQuestion Bank EeePRASAD MALINoch keine Bewertungen
- SGP 2019 Objective QuestionsDokument7 SeitenSGP 2019 Objective Questionsdenkulu gaaduNoch keine Bewertungen
- Objective Questions - Doc RKDokument35 SeitenObjective Questions - Doc RKk_ramkhi7960Noch keine Bewertungen
- Written Exam QPDokument4 SeitenWritten Exam QPcholleti sriramNoch keine Bewertungen
- Network & DC Machine - BSEBDokument3 SeitenNetwork & DC Machine - BSEBKimberly WoodNoch keine Bewertungen
- 1 Mark MCQ With Answer PC-EE-401Dokument5 Seiten1 Mark MCQ With Answer PC-EE-401Sanjoy PathakNoch keine Bewertungen
- MachineDokument39 SeitenMachineMudavath ChandramNoch keine Bewertungen
- Ac DCDokument111 SeitenAc DCWILBERT DUAYANNoch keine Bewertungen
- L L L L: Question Paper 1Dokument17 SeitenL L L L: Question Paper 1ACADEMIC MAILNoch keine Bewertungen
- Electrical Engineering Objective Type QuestionsDokument117 SeitenElectrical Engineering Objective Type QuestionsSuresh ThallapelliNoch keine Bewertungen
- 2 Marks MCQ WITH ANSWER PC-EE-401Dokument4 Seiten2 Marks MCQ WITH ANSWER PC-EE-401Sanjoy PathakNoch keine Bewertungen
- Magnetism, Sensor, Transducer and Electrical Machine: Page 1 of 6Dokument6 SeitenMagnetism, Sensor, Transducer and Electrical Machine: Page 1 of 6morijiNoch keine Bewertungen
- DC Generator MCQ PDFDokument21 SeitenDC Generator MCQ PDFNitesh Kumar KrishnaNoch keine Bewertungen
- DC GeneratorsDokument18 SeitenDC GeneratorsLondon BoyNoch keine Bewertungen
- Exams 2015 - Electrical MachinesDokument7 SeitenExams 2015 - Electrical Machinesappiagyei nicholasNoch keine Bewertungen
- MCQ ElectricalDokument54 SeitenMCQ ElectricalEng Mohammed AdelNoch keine Bewertungen
- Btech 1 Sem Basic Electrical Engineering 2012Dokument4 SeitenBtech 1 Sem Basic Electrical Engineering 2012Faisal TaslimNoch keine Bewertungen
- Ae Mock Test Paper1 22 MCQDokument13 SeitenAe Mock Test Paper1 22 MCQALLU ARJUNNoch keine Bewertungen
- TransformerDokument9 SeitenTransformerBashaer coNoch keine Bewertungen
- 2 EE Objective Paper II 2011Dokument18 Seiten2 EE Objective Paper II 2011LavNoch keine Bewertungen
- Electrical Engineering Objective Type Questions PDFDokument155 SeitenElectrical Engineering Objective Type Questions PDFsarathbabumjNoch keine Bewertungen
- MODULE 3: DC Generator Characteristics: Armature ResistanceDokument14 SeitenMODULE 3: DC Generator Characteristics: Armature ResistanceJaypeeNoch keine Bewertungen
- XII Physics HarishDokument4 SeitenXII Physics Harishjaipal singhNoch keine Bewertungen
- Ldica Objective..Unit WiseDokument5 SeitenLdica Objective..Unit WiseRAJOLI GIRISAI MADHAVNoch keine Bewertungen
- Final Quiz Electronics 1 Basic ElectronicsDokument3 SeitenFinal Quiz Electronics 1 Basic ElectronicsJay ZacariasNoch keine Bewertungen
- 1571292761168-Objective Type Question Bank For JE LGDDokument137 Seiten1571292761168-Objective Type Question Bank For JE LGDAiron Khynel U. AguilingNoch keine Bewertungen
- Electrical QuestionsDokument40 SeitenElectrical Questionsየፐፐፐ ነገርNoch keine Bewertungen
- Department of Technical Education Andhra PradeshDokument36 SeitenDepartment of Technical Education Andhra PradeshSaravanan T YNoch keine Bewertungen
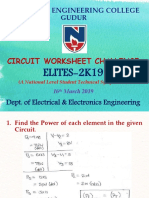
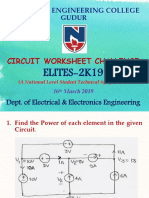
- Circuit WorkSheet Challenge KeyDokument9 SeitenCircuit WorkSheet Challenge KeySaravanan T YNoch keine Bewertungen
- Department of Technical Education Andhra PradeshDokument34 SeitenDepartment of Technical Education Andhra PradeshSaravanan T YNoch keine Bewertungen
- Department of Technical Education Andhra PradeshDokument26 SeitenDepartment of Technical Education Andhra PradeshSaravanan T YNoch keine Bewertungen
- Circuit WorkSheet ChallengeDokument9 SeitenCircuit WorkSheet ChallengeSaravanan T YNoch keine Bewertungen
- Control of Induction MotorsDokument80 SeitenControl of Induction MotorsSaravanan T YNoch keine Bewertungen
- Control of Synchronous MotorDokument12 SeitenControl of Synchronous MotorSaravanan T YNoch keine Bewertungen
- 3 ExperimentsDokument100 Seiten3 ExperimentsSaravanan T YNoch keine Bewertungen
- Electric Power Generating Stations: A Presentation OnDokument29 SeitenElectric Power Generating Stations: A Presentation OnSaravanan T YNoch keine Bewertungen
- Induction Motor: Saravanan T Y Assistant Professor EEE Department NEC GudurDokument18 SeitenInduction Motor: Saravanan T Y Assistant Professor EEE Department NEC GudurSaravanan T YNoch keine Bewertungen
- DC Machines: Saravanan T Y Assistant Professor EEE Department Nararana Engineering College GudurDokument34 SeitenDC Machines: Saravanan T Y Assistant Professor EEE Department Nararana Engineering College GudurSaravanan T YNoch keine Bewertungen
- Unit-1 - DC & AC Circuits PDFDokument60 SeitenUnit-1 - DC & AC Circuits PDFSaravanan T Y100% (5)
- Ii. Iii I: AcademicDokument1 SeiteIi. Iii I: AcademicSaravanan T YNoch keine Bewertungen
- PSD Subjective II Sem 2016-17Dokument7 SeitenPSD Subjective II Sem 2016-17Saravanan T YNoch keine Bewertungen
- EM-III Subjective I Sem 2017-18Dokument6 SeitenEM-III Subjective I Sem 2017-18Saravanan T YNoch keine Bewertungen
- Synchronous Generators NotesDokument75 SeitenSynchronous Generators NotesSaravanan T Y100% (1)
- TimersDokument51 SeitenTimersSaravanan T YNoch keine Bewertungen
- Raja Phd. Abstract - Gupfc.hpfcmodDokument4 SeitenRaja Phd. Abstract - Gupfc.hpfcmodSaravanan T YNoch keine Bewertungen
- MCQ of D.C MotorDokument10 SeitenMCQ of D.C Motorkibrom atsbhaNoch keine Bewertungen
- Dr. Assad Abu-Jasser, ECE-iugaza: Electrical Machines (EELE 4350)Dokument37 SeitenDr. Assad Abu-Jasser, ECE-iugaza: Electrical Machines (EELE 4350)MohammedSaadaniHassani67% (6)
- Methods of Starting Synchronous MotorDokument3 SeitenMethods of Starting Synchronous MotorKartikey RaghavNoch keine Bewertungen
- 13C NMR Spectroscopy in Organic Chemistry MCQDokument27 Seiten13C NMR Spectroscopy in Organic Chemistry MCQShunmugasundaram ArunachalamNoch keine Bewertungen
- 3 - Induction Motor Tutorial SolutionsDokument5 Seiten3 - Induction Motor Tutorial SolutionsSeanNoch keine Bewertungen
- Wound Rotor Induction MotorDokument4 SeitenWound Rotor Induction MotorAnonymous zeISoBNoch keine Bewertungen
- 5B5-02 3PU 2pot Part 1Dokument12 Seiten5B5-02 3PU 2pot Part 1Witit WattanaNoch keine Bewertungen
- Narrative Brushless Ac GeneratorDokument3 SeitenNarrative Brushless Ac GeneratorASTIG TVNoch keine Bewertungen
- Litar - Litar Kawalan MotorDokument7 SeitenLitar - Litar Kawalan Motormieputra97% (30)
- Saurashtra University, Rajkot. B.E. Sem Iv (Ec) 404: Electrical TechnologyDokument1 SeiteSaurashtra University, Rajkot. B.E. Sem Iv (Ec) 404: Electrical Technologysopan saNoch keine Bewertungen
- Multiple Choice Question (MCQ) of D.C. MachinesDokument26 SeitenMultiple Choice Question (MCQ) of D.C. Machineskibrom atsbha100% (2)
- E M II: Synchronous MotorDokument14 SeitenE M II: Synchronous MotorAkashman ShakyaNoch keine Bewertungen
- Unit III (Part III)Dokument14 SeitenUnit III (Part III)YUSRA MERAJNoch keine Bewertungen
- A.C Single Phase 4-Pole Squirrel Cage Induction Motor TheoryDokument5 SeitenA.C Single Phase 4-Pole Squirrel Cage Induction Motor TheoryCønstäh Van Der WüppertälärîanskíhNoch keine Bewertungen
- Synchronous MotorDokument26 SeitenSynchronous MotorSyed Muhammad Munavvar HussainNoch keine Bewertungen
- Doubly Fed Electric MachineDokument19 SeitenDoubly Fed Electric MachineChristopher PerkinsNoch keine Bewertungen
- Induction Motor Starting MethodsDokument4 SeitenInduction Motor Starting Methodsعلي عايد عبدالشهيدNoch keine Bewertungen
- MultitrackDokument1 SeiteMultitrackMUGUREL CONSTANTIN LebadaNoch keine Bewertungen
- Industrial Machine Control Lecture Notes PDFDokument78 SeitenIndustrial Machine Control Lecture Notes PDFRicky AmbuliNoch keine Bewertungen
- Ame 3L Experiment 8 Speed Control of Slipring Induction Motor AIMDokument7 SeitenAme 3L Experiment 8 Speed Control of Slipring Induction Motor AIMCeline Kate BentayaoNoch keine Bewertungen
- AC MotorDokument71 SeitenAC Motorstallone21Noch keine Bewertungen
- Datasheet Motor PapDokument1 SeiteDatasheet Motor PapMarcos Garcia YsuizaNoch keine Bewertungen
- 3-Phase Induction Motor Notes - 29.03.2022Dokument135 Seiten3-Phase Induction Motor Notes - 29.03.2022ronaldeen21Noch keine Bewertungen
- All 2 Marks emDokument54 SeitenAll 2 Marks emSathishNoch keine Bewertungen
- Permanent Magnet DC MotorDokument4 SeitenPermanent Magnet DC MotorSourav Kumar100% (1)
- Unit-2 DC Machines and TransformerDokument12 SeitenUnit-2 DC Machines and TransformerJayantSharmaNoch keine Bewertungen
- PWLS 1.0.1 ToolsDokument222 SeitenPWLS 1.0.1 Toolspot100% (1)
- Project Report Physics XII TransformersDokument12 SeitenProject Report Physics XII TransformersPankaj Gill68% (77)
- Varistor - Test (GZP)Dokument3 SeitenVaristor - Test (GZP)Hugo CiprianiNoch keine Bewertungen
- Lecture Notes Elec A6: Induction MachinesDokument39 SeitenLecture Notes Elec A6: Induction MachinesRam PrasadNoch keine Bewertungen
- Electric Motor Control: DC, AC, and BLDC MotorsVon EverandElectric Motor Control: DC, AC, and BLDC MotorsBewertung: 4.5 von 5 Sternen4.5/5 (19)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesVon EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesBewertung: 4.5 von 5 Sternen4.5/5 (21)
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterVon EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterNoch keine Bewertungen
- Electric Motors and Drives: Fundamentals, Types and ApplicationsVon EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsBewertung: 4.5 von 5 Sternen4.5/5 (12)
- Well Control for Completions and InterventionsVon EverandWell Control for Completions and InterventionsBewertung: 4 von 5 Sternen4/5 (10)
- Well Integrity for Workovers and RecompletionsVon EverandWell Integrity for Workovers and RecompletionsBewertung: 5 von 5 Sternen5/5 (3)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialVon EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNoch keine Bewertungen
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceVon EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceNoch keine Bewertungen
- Solar Energy: Survive Easily on Solar Power Off the GridVon EverandSolar Energy: Survive Easily on Solar Power Off the GridNoch keine Bewertungen
- Building Energy Management Systems and Techniques: Principles, Methods, and ModellingVon EverandBuilding Energy Management Systems and Techniques: Principles, Methods, and ModellingNoch keine Bewertungen
- Idaho Falls: The Untold Story of America's First Nuclear AccidentVon EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentBewertung: 4.5 von 5 Sternen4.5/5 (21)
- Air Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&AVon EverandAir Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&ANoch keine Bewertungen
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionBewertung: 5 von 5 Sternen5/5 (1)
- Renewable Energy: Physics, Engineering, Environmental Impacts, Economics and PlanningVon EverandRenewable Energy: Physics, Engineering, Environmental Impacts, Economics and PlanningBewertung: 5 von 5 Sternen5/5 (4)
- Thermal Power Plant: Design and OperationVon EverandThermal Power Plant: Design and OperationBewertung: 4.5 von 5 Sternen4.5/5 (23)
- Handbook on Battery Energy Storage SystemVon EverandHandbook on Battery Energy Storage SystemBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Pipeline and Energy Plant Piping: Design and TechnologyVon EverandPipeline and Energy Plant Piping: Design and TechnologyBewertung: 5 von 5 Sternen5/5 (2)
- Practical Power Distribution for IndustryVon EverandPractical Power Distribution for IndustryBewertung: 2.5 von 5 Sternen2.5/5 (2)
- Global Landscape of Renewable Energy FinanceVon EverandGlobal Landscape of Renewable Energy FinanceNoch keine Bewertungen
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsVon EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Flow Analysis for Hydrocarbon Pipeline EngineeringVon EverandFlow Analysis for Hydrocarbon Pipeline EngineeringNoch keine Bewertungen
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsVon EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNoch keine Bewertungen
- Heat Transfer Engineering: Fundamentals and TechniquesVon EverandHeat Transfer Engineering: Fundamentals and TechniquesBewertung: 4 von 5 Sternen4/5 (1)
- The Truth About Solar Panels The Book That Solar Manufacturers, Vendors, Installers And DIY Scammers Don't Want You To ReadVon EverandThe Truth About Solar Panels The Book That Solar Manufacturers, Vendors, Installers And DIY Scammers Don't Want You To ReadBewertung: 4.5 von 5 Sternen4.5/5 (10)
- Shorting the Grid: The Hidden Fragility of Our Electric GridVon EverandShorting the Grid: The Hidden Fragility of Our Electric GridBewertung: 4.5 von 5 Sternen4.5/5 (2)