Das könnte Ihnen auch gefallen
- 01 2 Sistemas Internos de Aseguramiento de La CalidadDokument10 Seiten01 2 Sistemas Internos de Aseguramiento de La CalidadCarlos Ivan Bucheli ChavesNoch keine Bewertungen
- Ejercicio U OrienteDokument1 SeiteEjercicio U OrienteCarlos Ivan Bucheli ChavesNoch keine Bewertungen
- Precios Unitarios de Referencia 2019 I 27 Diciembre 2019Dokument1.510 SeitenPrecios Unitarios de Referencia 2019 I 27 Diciembre 2019Carlos Ivan Bucheli ChavesNoch keine Bewertungen
- Derecho A La Educacion Inclusiva en El Marco de Las Politicas PublicasDokument34 SeitenDerecho A La Educacion Inclusiva en El Marco de Las Politicas PublicasMónicaZambranoLeónNoch keine Bewertungen
- Semianrio Doctorado I-2021 2 SesiónDokument2 SeitenSemianrio Doctorado I-2021 2 SesiónCarlos Ivan Bucheli ChavesNoch keine Bewertungen
- Tesis Radio Suta Tenza PDFDokument202 SeitenTesis Radio Suta Tenza PDFJendry MorenoNoch keine Bewertungen
- 01 1 Diversidad InstitucionalDokument33 Seiten01 1 Diversidad InstitucionalCarlos Ivan Bucheli ChavesNoch keine Bewertungen
- Precios - Unitarios - de - Referencia - 2019 II - Mano - de - Obra - 2020 - 3 - Junio - 2020Dokument1.525 SeitenPrecios - Unitarios - de - Referencia - 2019 II - Mano - de - Obra - 2020 - 3 - Junio - 2020angellxNoch keine Bewertungen
- Precios Unitarios de Referencia 2019 II 31 Diciembre 2019Dokument1.314 SeitenPrecios Unitarios de Referencia 2019 II 31 Diciembre 2019Carlos Ivan Bucheli ChavesNoch keine Bewertungen
- 4683 26000 2 PBDokument19 Seiten4683 26000 2 PBAlbertoNoch keine Bewertungen
- Inclusión EducativaDokument62 SeitenInclusión EducativaNATALIA RUIZ CORREANoch keine Bewertungen
- Bajo El Beso Aborigen Del SolDokument60 SeitenBajo El Beso Aborigen Del SolOlmedo TovarNoch keine Bewertungen
- 3 - Equal Right Equal Opportunity ES PDFDokument36 Seiten3 - Equal Right Equal Opportunity ES PDFtatiana alvarezNoch keine Bewertungen
- Comunicación e historia de las comunicacionesDokument133 SeitenComunicación e historia de las comunicacionesjosemauricioardilaNoch keine Bewertungen
- Castro Leidy Andrea 2017Dokument78 SeitenCastro Leidy Andrea 2017Carlos Ivan Bucheli ChavesNoch keine Bewertungen
- De La Escuela Expansiva A La Escuela Competitiva 2Dokument30 SeitenDe La Escuela Expansiva A La Escuela Competitiva 2Nataly HernandezNoch keine Bewertungen
- Libro Modelos Educativos Innovadores en PDFDokument437 SeitenLibro Modelos Educativos Innovadores en PDFGuadalupeNoch keine Bewertungen
- Críticas Al PositivismoDokument27 SeitenCríticas Al Positivismolacsuarez0% (2)
- Humanismo en El Pensamiento de Ricardo NassifDokument29 SeitenHumanismo en El Pensamiento de Ricardo NassifHumberto saidasNoch keine Bewertungen
- Educacion Popular PDFDokument260 SeitenEducacion Popular PDFElkin HurtadoNoch keine Bewertungen
- Características de La Educación en Lati... - Mapa MentalDokument1 SeiteCaracterísticas de La Educación en Lati... - Mapa MentalCarlos Ivan Bucheli Chaves100% (1)
- Revista de Pedagogía 0798-9792: IssnDokument5 SeitenRevista de Pedagogía 0798-9792: IssnCarlos Ivan Bucheli ChavesNoch keine Bewertungen
- Modernidad Colonialismo y EmancipacionDokument338 SeitenModernidad Colonialismo y EmancipacionJerjesljNoch keine Bewertungen
- Semianrio Doctorado I-2021Dokument9 SeitenSemianrio Doctorado I-2021Carlos Ivan Bucheli ChavesNoch keine Bewertungen
- Humanismo en El Pensamiento de Ricardo NassifDokument29 SeitenHumanismo en El Pensamiento de Ricardo NassifHumberto saidasNoch keine Bewertungen
- AdrianoFernandez 2016 Campocurricular PDFDokument360 SeitenAdrianoFernandez 2016 Campocurricular PDFJairo100% (1)
- Características de La Educación en Lati... - Mapa MentalDokument1 SeiteCaracterísticas de La Educación en Lati... - Mapa MentalCarlos Ivan Bucheli Chaves100% (1)
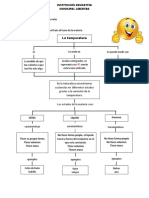
- La Temperatura: ASIGNATURA: Ciencias Naturales GRADO: TerceroDokument1 SeiteLa Temperatura: ASIGNATURA: Ciencias Naturales GRADO: TerceroCarlos Ivan Bucheli ChavesNoch keine Bewertungen
- Resolución 34 de 2020Dokument3 SeitenResolución 34 de 2020DanielCelyNoch keine Bewertungen
- Proceso de Fallas Inteligencia ArtificialDokument16 SeitenProceso de Fallas Inteligencia ArtificialCarrito PerdidoNoch keine Bewertungen
- Informe Sistemas InteligentesDokument6 SeitenInforme Sistemas InteligentesHUGO CESAR CASANOVA DEL CASTILLONoch keine Bewertungen
- Redes Neuronales en MedicinaDokument7 SeitenRedes Neuronales en MedicinaIván PeraltaNoch keine Bewertungen
- Redes Neuronales PDFDokument50 SeitenRedes Neuronales PDFArmando ValleNoch keine Bewertungen
- Curso - Practicas Educativas Inclusivas ArmandoDokument14 SeitenCurso - Practicas Educativas Inclusivas ArmandoArmando Suarez MedinaNoch keine Bewertungen
- Ledesma Redes NeuronalesDokument50 SeitenLedesma Redes NeuronalesGabriel GranillaNoch keine Bewertungen
- Sistema de Pronóstico de La Demanda de Productos PDFDokument142 SeitenSistema de Pronóstico de La Demanda de Productos PDFlucasNoch keine Bewertungen
- Los componentes del aprendizaje: resultados, procesos y condicionesDokument13 SeitenLos componentes del aprendizaje: resultados, procesos y condicionesHéctor Kasem0% (1)
- Cuadro Sinoptico de La Unidad 4 IaDokument2 SeitenCuadro Sinoptico de La Unidad 4 IaEder MogollonNoch keine Bewertungen
- ConexionismoDokument10 SeitenConexionismoEnteringAbbysNoch keine Bewertungen
- Fichas TotalDokument50 SeitenFichas TotalElkin Fernando Teran GomezNoch keine Bewertungen
- Actividad - 12 - Evolucion de - La - Inteligencia - ArtificialDokument4 SeitenActividad - 12 - Evolucion de - La - Inteligencia - ArtificialDarwin PinedaNoch keine Bewertungen
- Minería de DatosDokument15 SeitenMinería de DatosEric L.Noch keine Bewertungen
- IA2-C01-P3 - Fundamentos - Ipynb - ColaboratoryDokument14 SeitenIA2-C01-P3 - Fundamentos - Ipynb - ColaboratoryNinoska CuencaNoch keine Bewertungen
- Trabajo Investigación - Grupo 6Dokument21 SeitenTrabajo Investigación - Grupo 6sebaszc18Noch keine Bewertungen
- Inteligencia Artificial. Trabajo Bibliográfico. Vanessa Lugo, Maria Andriolo, Maria Salima.Dokument20 SeitenInteligencia Artificial. Trabajo Bibliográfico. Vanessa Lugo, Maria Andriolo, Maria Salima.VnaessaNoch keine Bewertungen
- MODULO 4 - UnlockedDokument19 SeitenMODULO 4 - UnlockedAlejandЯo AyalaNoch keine Bewertungen
- Formato Articulos IEEEDokument11 SeitenFormato Articulos IEEEDF Otero ArrascueNoch keine Bewertungen
- Proyecto - Robot Scara PDFDokument10 SeitenProyecto - Robot Scara PDFAlberth Muñoz VerduguezNoch keine Bewertungen
- Visión ArtificialDokument12 SeitenVisión ArtificialGutierrez Rojas Elio WilyNoch keine Bewertungen
- 1 - Redes Neuronales y Logica DifusaDokument18 Seiten1 - Redes Neuronales y Logica DifusaJorge Alberto ParedesNoch keine Bewertungen
- Actividad 3 - Modelos Tempranos en El Estudio de La CogniciónDokument5 SeitenActividad 3 - Modelos Tempranos en El Estudio de La Cogniciónelizabeth gomez100% (1)
- 1 Inteligencia Artificial UdabolDokument48 Seiten1 Inteligencia Artificial UdabolSandi R Ch ChNoch keine Bewertungen
- Tower PDFDokument142 SeitenTower PDFNelson SchleifsteinNoch keine Bewertungen
- SE e Inteligencia ArtificialDokument8 SeitenSE e Inteligencia ArtificialEder OrlandoNoch keine Bewertungen
- Presentación Áreas-Líneas-Temas FIC UNIDokument91 SeitenPresentación Áreas-Líneas-Temas FIC UNIIan Josue Palomino JimenezNoch keine Bewertungen
- Control Inteligente IntroducciónDokument28 SeitenControl Inteligente IntroducciónJuan José González AyalaNoch keine Bewertungen
- Análisis de estabilidad transitoria del sistema eléctrico ecuatoriano mediante redes neuronales artificialesDokument208 SeitenAnálisis de estabilidad transitoria del sistema eléctrico ecuatoriano mediante redes neuronales artificialesAdolfo Luis Salas DiazNoch keine Bewertungen
- Laura Sanz Ruano - ResumenDokument2 SeitenLaura Sanz Ruano - ResumenLaurita Sanz RuanoNoch keine Bewertungen
- Ractica de Biotecnologia Virtualizado Telectroforesis y Analisis de Secuencias de AdnDokument20 SeitenRactica de Biotecnologia Virtualizado Telectroforesis y Analisis de Secuencias de AdnErlanProx CopariNoch keine Bewertungen