Das könnte Ihnen auch gefallen
- Cirrus Logic Interview TopicsDokument3 SeitenCirrus Logic Interview TopicsGopi SundaresanNoch keine Bewertungen
- Embedded System Lesson PlanDokument4 SeitenEmbedded System Lesson PlandeccancollegeNoch keine Bewertungen
- ECE411 - Problem Set 1 - IntroductionDokument7 SeitenECE411 - Problem Set 1 - IntroductionMartine JimenezNoch keine Bewertungen
- ECE411 - 4c - The Z-Transform - Problem Set 1Dokument2 SeitenECE411 - 4c - The Z-Transform - Problem Set 1Martine JimenezNoch keine Bewertungen
- BWT Septron Line 31-61 Rev01!08!05-18 Opm enDokument56 SeitenBWT Septron Line 31-61 Rev01!08!05-18 Opm enDavide Grioni100% (1)
- DIGITAL SIGNAL PROCESSING Unit 6Dokument28 SeitenDIGITAL SIGNAL PROCESSING Unit 6pramod mgNoch keine Bewertungen
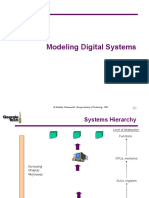
- Modeling Digital Systems: © Sudhakar Yalamanchili, Georgia Institute of Technology, 2006Dokument19 SeitenModeling Digital Systems: © Sudhakar Yalamanchili, Georgia Institute of Technology, 2006mahendra singhNoch keine Bewertungen
- Fractional Order Sliding Mode Control Based Chaos Synchronization and Secure CommunicationDokument6 SeitenFractional Order Sliding Mode Control Based Chaos Synchronization and Secure CommunicationPRITAM PARALNoch keine Bewertungen
- Chapter 2Dokument19 SeitenChapter 2Kiran GunasegaranNoch keine Bewertungen
- Linear Phase FIR Filters (Type-I, Type-II, Type-III and Type-IV) and Frequency Sampling Method - 28MARCH - 2022Dokument24 SeitenLinear Phase FIR Filters (Type-I, Type-II, Type-III and Type-IV) and Frequency Sampling Method - 28MARCH - 2022Shahwar AliaNoch keine Bewertungen
- A Physical Transmitter Implementation of A Quadrature Space Shift Keying MIMO SystemDokument5 SeitenA Physical Transmitter Implementation of A Quadrature Space Shift Keying MIMO Systempeppas4643Noch keine Bewertungen
- A Course Material On DSPDokument193 SeitenA Course Material On DSPprabuparthibanNoch keine Bewertungen
- 2013 ICRA MckoDokument8 Seiten2013 ICRA Mckonorok77560Noch keine Bewertungen
- CISC vs. RISC Hardware and Programming ComplexityDokument6 SeitenCISC vs. RISC Hardware and Programming ComplexityTestauNoch keine Bewertungen
- Performance Analysis of LDPC Coded OFDM System: XIV Poznań Telecommunications Workshop - PWT 2010 1Dokument4 SeitenPerformance Analysis of LDPC Coded OFDM System: XIV Poznań Telecommunications Workshop - PWT 2010 1Luis ToanNoch keine Bewertungen
- The Research and Simulation of CSMACA Mechanism ofDokument6 SeitenThe Research and Simulation of CSMACA Mechanism ofcristina comanescuNoch keine Bewertungen
- Updated - DSP Lab ManualDokument116 SeitenUpdated - DSP Lab ManualKushagraNoch keine Bewertungen
- Part1 DSPconceptDokument20 SeitenPart1 DSPconceptkrishnakumari narreddiNoch keine Bewertungen
- Simulation-Based Engineering of Context-Sensitive SystemsDokument3 SeitenSimulation-Based Engineering of Context-Sensitive Systemsshannon879Noch keine Bewertungen
- Effect of Coefficient Quantization on Frequency Response of IIR Digital FiltersDokument6 SeitenEffect of Coefficient Quantization on Frequency Response of IIR Digital Filtersaswesee asweseeNoch keine Bewertungen
- DSP 2012Dokument82 SeitenDSP 2012SREELEKHA K RNoch keine Bewertungen
- Basic Course On 8051 MicrocontrollersDokument2 SeitenBasic Course On 8051 Microcontrollerssathish37Noch keine Bewertungen
- PN Sequence Generation From 2-D Array of Shift RegistersDokument7 SeitenPN Sequence Generation From 2-D Array of Shift RegistersR InduNoch keine Bewertungen
- Matlab Based Platform For The Evaluation of Modulation Techniques Used in VLCDokument5 SeitenMatlab Based Platform For The Evaluation of Modulation Techniques Used in VLCsimarpreetNoch keine Bewertungen
- Speed Compact Priority EncoderDokument4 SeitenSpeed Compact Priority EncoderNeha TripathiNoch keine Bewertungen
- 1997 TCASII I. Galton Spectral Shaping of Circuit Errors in Digital To Analog ConvertersDokument10 Seiten1997 TCASII I. Galton Spectral Shaping of Circuit Errors in Digital To Analog Converterskijiji userNoch keine Bewertungen
- RT-Lab Based Real-Time Simulation of A Direct Field-Oriented Controller For An Induction MotorDokument6 SeitenRT-Lab Based Real-Time Simulation of A Direct Field-Oriented Controller For An Induction MotorMagpie 2023Noch keine Bewertungen
- On The Tail-Biting Convolutional Code Decoder For The LTE and LTE-A Standards'Dokument5 SeitenOn The Tail-Biting Convolutional Code Decoder For The LTE and LTE-A Standards'vardhanw1757Noch keine Bewertungen
- 18 Hybrid Modulation Scheme Combining PPMwith Differential Chaos Shift Keying ModulationDokument5 Seiten18 Hybrid Modulation Scheme Combining PPMwith Differential Chaos Shift Keying ModulationLeo SimpleNoch keine Bewertungen
- Adaptive LMS Algorithm for System Identification Using LabVIEWDokument4 SeitenAdaptive LMS Algorithm for System Identification Using LabVIEWsugengNoch keine Bewertungen
- Eee-V-Signals and Systems U2Dokument13 SeitenEee-V-Signals and Systems U2Charan V ChanNoch keine Bewertungen
- Ill Outlines::ontrolDokument5 SeitenIll Outlines::ontrolPratibha V. HegdeNoch keine Bewertungen
- Trajectory Tracking of Quaternion Based Quadrotor Using Model Predictive ControlDokument19 SeitenTrajectory Tracking of Quaternion Based Quadrotor Using Model Predictive ControlMaidul IslamNoch keine Bewertungen
- Robot Singularities and Jacobian AnalysisDokument14 SeitenRobot Singularities and Jacobian AnalysisROBERTO GARCIA DURONNoch keine Bewertungen
- DTS-StructuresDokument17 SeitenDTS-StructuresRakesh SharmaNoch keine Bewertungen
- Tensorly-Quantum: Quantum Machine Learning With Tensor MethodsDokument6 SeitenTensorly-Quantum: Quantum Machine Learning With Tensor MethodsLakshika RathiNoch keine Bewertungen
- ICT Exp 1 - CMOS Inverter Layout & SimulationDokument2 SeitenICT Exp 1 - CMOS Inverter Layout & SimulationShameem ShaikNoch keine Bewertungen
- Real Time Matlab Interface For Speed Control of Induction Motor Drive Using Dspic 30F4011Dokument6 SeitenReal Time Matlab Interface For Speed Control of Induction Motor Drive Using Dspic 30F4011RathnaSamy SgrNoch keine Bewertungen
- 04 EstimatingDokument6 Seiten04 EstimatingskruzicNoch keine Bewertungen
- MATLAB Control Design ExamplesDokument77 SeitenMATLAB Control Design ExamplesChawalit WutiananchaiNoch keine Bewertungen
- Labview Fpga Based Noise Cancelling Using The Lms Adaptive AlgorithmDokument4 SeitenLabview Fpga Based Noise Cancelling Using The Lms Adaptive AlgorithmGoran MiljkovicNoch keine Bewertungen
- SPACECRAFTDokument11 SeitenSPACECRAFTThiago CésarNoch keine Bewertungen
- 224 Szczesniak 396 397Dokument2 Seiten224 Szczesniak 396 397drsurferNoch keine Bewertungen
- Rezai CWM C 2010Dokument6 SeitenRezai CWM C 2010harshNoch keine Bewertungen
- Icoa Ch1 IntroDokument10 SeitenIcoa Ch1 IntroKazumiYoshidaNoch keine Bewertungen
- Isro Ec Syllabus 2020: Useful LinksDokument7 SeitenIsro Ec Syllabus 2020: Useful LinksNikita SolunkeNoch keine Bewertungen
- Numerically Controlled Oscillator With Spur Reduction: Hans-Jörg Pfleiderer Stefan LachowiczDokument4 SeitenNumerically Controlled Oscillator With Spur Reduction: Hans-Jörg Pfleiderer Stefan LachowiczRaffi SkNoch keine Bewertungen
- Convex Optimization With Abstract Linear OperatorsDokument9 SeitenConvex Optimization With Abstract Linear OperatorsjohanNoch keine Bewertungen
- 01028102Dokument14 Seiten01028102AyanNoch keine Bewertungen
- Reserch On Digital Closed-Loop Control For Silicon Resonant AccelerometerDokument4 SeitenReserch On Digital Closed-Loop Control For Silicon Resonant AccelerometerjhvghvghjvgjhNoch keine Bewertungen
- DSP Lab Manual New 2018-19Dokument45 SeitenDSP Lab Manual New 2018-19SandeshNoch keine Bewertungen
- Digital Communications and Networks: Martin Damrath, Peter Adam Hoeher, Gilbert J.M. ForkelDokument8 SeitenDigital Communications and Networks: Martin Damrath, Peter Adam Hoeher, Gilbert J.M. ForkelrolingNoch keine Bewertungen
- APCCAS2008 MGomesDokument4 SeitenAPCCAS2008 MGomesldpcNoch keine Bewertungen
- Bachelors Electrical Electronics Final Year CoursesDokument8 SeitenBachelors Electrical Electronics Final Year Coursessultan altamashNoch keine Bewertungen
- Speed Nonlinear Control of DC Motor Drive With Field WeakeningDokument7 SeitenSpeed Nonlinear Control of DC Motor Drive With Field WeakeningJuan Jose LeónNoch keine Bewertungen
- Robust Computer Control An Inverted Pendulum: Medrano-CerdaDokument10 SeitenRobust Computer Control An Inverted Pendulum: Medrano-CerdaVictor PassosNoch keine Bewertungen
- Ericmario 2010Dokument4 SeitenEricmario 2010Phạm ĐăngNoch keine Bewertungen
- Guo Generating Diverse and CVPR 2022 SupplementalDokument9 SeitenGuo Generating Diverse and CVPR 2022 SupplementalMohanKrishnaNoch keine Bewertungen
- Model Predictive Control Design: New Trends and Tools: Alberto BemporadDokument6 SeitenModel Predictive Control Design: New Trends and Tools: Alberto BemporadNguyễn Xuân KhảiNoch keine Bewertungen
- Process Ident, Controller Tuning and Control Circuit Sim in ExcelDokument7 SeitenProcess Ident, Controller Tuning and Control Circuit Sim in ExcelIlich LamaNoch keine Bewertungen
- Introduction to Digital Signal Processing and Filter DesignVon EverandIntroduction to Digital Signal Processing and Filter DesignNoch keine Bewertungen
- Some Case Studies on Signal, Audio and Image Processing Using MatlabVon EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNoch keine Bewertungen
- Nonlinear Control Feedback Linearization Sliding Mode ControlVon EverandNonlinear Control Feedback Linearization Sliding Mode ControlNoch keine Bewertungen
- Solution Set To Problems (DT-LTI Systems) - Realization of DT SystemsDokument8 SeitenSolution Set To Problems (DT-LTI Systems) - Realization of DT SystemsMartine JimenezNoch keine Bewertungen
- ECE411 - 6 - The Discrete Fourier Transform and The Fast Fourier TransformDokument15 SeitenECE411 - 6 - The Discrete Fourier Transform and The Fast Fourier TransformMartine JimenezNoch keine Bewertungen
- ECE411 - 5 - Frequency Analysis of DT SystemsDokument22 SeitenECE411 - 5 - Frequency Analysis of DT SystemsMartine JimenezNoch keine Bewertungen
- Solution Set To Problems (DT-LTI Systems) - Solution To Difference EquationsDokument19 SeitenSolution Set To Problems (DT-LTI Systems) - Solution To Difference EquationsMartine JimenezNoch keine Bewertungen
- ECE411 1 IntroductionDokument13 SeitenECE411 1 IntroductionMartine JimenezNoch keine Bewertungen
- Ece411 - 3 - Dt-Lti SystemsDokument23 SeitenEce411 - 3 - Dt-Lti SystemsMartine JimenezNoch keine Bewertungen
- Problem Set (DT-LTI Systems) - Solution To Difference EquationsDokument1 SeiteProblem Set (DT-LTI Systems) - Solution To Difference EquationsMartine JimenezNoch keine Bewertungen
- Problem Set (DT-LTI Systems) - Realization of DT SystemsDokument1 SeiteProblem Set (DT-LTI Systems) - Realization of DT SystemsMartine JimenezNoch keine Bewertungen
- ECE411 - 4b - The Z-TransformDokument10 SeitenECE411 - 4b - The Z-TransformMartine JimenezNoch keine Bewertungen
- ECE411 - Problem Set 3 - DT-LTI SystemsDokument27 SeitenECE411 - Problem Set 3 - DT-LTI SystemsMartine JimenezNoch keine Bewertungen
- Course Orientation: - Course Code: ECE 411 - Course Name: - Course DescriptionDokument2 SeitenCourse Orientation: - Course Code: ECE 411 - Course Name: - Course DescriptionMartine JimenezNoch keine Bewertungen
- ECE411 - Problem Set 2 - DT Signals and SystemsDokument10 SeitenECE411 - Problem Set 2 - DT Signals and SystemsMartine JimenezNoch keine Bewertungen
- ECE411 - 4a - The Z-TransformDokument7 SeitenECE411 - 4a - The Z-TransformMartine JimenezNoch keine Bewertungen
- ECE411 - 4d - The Z-TransformDokument6 SeitenECE411 - 4d - The Z-TransformMartine JimenezNoch keine Bewertungen
- ECE411 - 2 - DT Signals and SystemsDokument12 SeitenECE411 - 2 - DT Signals and SystemsMartine JimenezNoch keine Bewertungen
- (Chapter 1) Introduction To Electronic Communication (1-18) PDFDokument18 Seiten(Chapter 1) Introduction To Electronic Communication (1-18) PDFgeorge ezar quiriadoNoch keine Bewertungen
- Tomasi Chapter 7-10 (Concepts)Dokument30 SeitenTomasi Chapter 7-10 (Concepts)Dave Mhar Raquel100% (3)
- Tomasi Chapter 7-10 (Concepts)Dokument30 SeitenTomasi Chapter 7-10 (Concepts)Dave Mhar Raquel100% (3)
- ECE412 - 5 - Angle ModulationDokument21 SeitenECE412 - 5 - Angle ModulationMartine JimenezNoch keine Bewertungen
- Signal Analysis and Mixing TechniquesDokument22 SeitenSignal Analysis and Mixing TechniquesGrace LatNoch keine Bewertungen
- ECE412 - 3 - AM and SSB ModulationDokument16 SeitenECE412 - 3 - AM and SSB ModulationMartine JimenezNoch keine Bewertungen
- ECE412 - 4 - Radio ReceiversDokument13 SeitenECE412 - 4 - Radio ReceiversMartine JimenezNoch keine Bewertungen
- ECE412 - 2 - OscillatorsDokument11 SeitenECE412 - 2 - OscillatorsMartine JimenezNoch keine Bewertungen
- ECE412 - 1 - IntroductionDokument17 SeitenECE412 - 1 - IntroductionMartine JimenezNoch keine Bewertungen
- Assessment (L4) : Case Analysis: Managerial EconomicsDokument4 SeitenAssessment (L4) : Case Analysis: Managerial EconomicsRocel DomingoNoch keine Bewertungen
- Amo Plan 2014Dokument4 SeitenAmo Plan 2014kaps2385Noch keine Bewertungen
- Costing - Type Wise Practical Mcq-Executive-RevisionDokument71 SeitenCosting - Type Wise Practical Mcq-Executive-RevisionShruthi ParameshwaranNoch keine Bewertungen
- CAM TOOL Solidworks PDFDokument6 SeitenCAM TOOL Solidworks PDFHussein ZeinNoch keine Bewertungen
- Self-Learning Module in General Chemistry 1 LessonDokument9 SeitenSelf-Learning Module in General Chemistry 1 LessonGhaniella B. JulianNoch keine Bewertungen
- Badminton Lesson 1 4 - 5 Grade: TH THDokument31 SeitenBadminton Lesson 1 4 - 5 Grade: TH THLoxcey LopezNoch keine Bewertungen
- Sceduling and Maintenance MTP ShutdownDokument18 SeitenSceduling and Maintenance MTP ShutdownAnonymous yODS5VNoch keine Bewertungen
- Introduction To Global Positioning System: Anil Rai I.A.S.R.I., New Delhi - 110012Dokument19 SeitenIntroduction To Global Positioning System: Anil Rai I.A.S.R.I., New Delhi - 110012vinothrathinamNoch keine Bewertungen
- KCL Thesis PrintingDokument4 SeitenKCL Thesis PrintingMelinda Watson100% (2)
- Performance of a Pelton WheelDokument17 SeitenPerformance of a Pelton Wheellimakupang_matNoch keine Bewertungen
- IBM Systems Journal PerspectivesDokument24 SeitenIBM Systems Journal PerspectivesSmitha MathewNoch keine Bewertungen
- JTIL Purchase Requisition for Plasma Machine SparesDokument3 SeitenJTIL Purchase Requisition for Plasma Machine Sparesshivam soniNoch keine Bewertungen
- PCG Master Consultancy Services AgreementDokument12 SeitenPCG Master Consultancy Services Agreementawscobie100% (1)
- Assignment 2: Lesson Plan Analysis, Revision and Justification - Kaitlin Rose TrojkoDokument9 SeitenAssignment 2: Lesson Plan Analysis, Revision and Justification - Kaitlin Rose Trojkoapi-408336810Noch keine Bewertungen
- Assessment of Benefits and Risk of Genetically ModDokument29 SeitenAssessment of Benefits and Risk of Genetically ModSkittlessmannNoch keine Bewertungen
- Case Study, g6Dokument62 SeitenCase Study, g6julie pearl peliyoNoch keine Bewertungen
- Product Data: T T 13 SEER Single - Packaged Heat Pump R (R - 410A) RefrigerantDokument36 SeitenProduct Data: T T 13 SEER Single - Packaged Heat Pump R (R - 410A) RefrigerantJesus CantuNoch keine Bewertungen
- Insert BondingDokument14 SeitenInsert BondingHelpful HandNoch keine Bewertungen
- 3240-B0 Programmable Logic Controller (SIEMENS ET200S IM151-8)Dokument7 Seiten3240-B0 Programmable Logic Controller (SIEMENS ET200S IM151-8)alexandre jose dos santosNoch keine Bewertungen
- DMDPrework QuizDokument5 SeitenDMDPrework Quizjunpe- yuutoNoch keine Bewertungen
- Siemens MS 42.0 Engine Control System GuideDokument56 SeitenSiemens MS 42.0 Engine Control System GuideIbnu NugroNoch keine Bewertungen
- Windows Keyboard Shortcuts OverviewDokument3 SeitenWindows Keyboard Shortcuts OverviewShaik Arif100% (1)
- Table of Contents and Executive SummaryDokument38 SeitenTable of Contents and Executive SummarySourav Ojha0% (1)
- Optimum Work Methods in The Nursery Potting ProcessDokument107 SeitenOptimum Work Methods in The Nursery Potting ProcessFöldi Béla100% (1)
- Confined Space SafetyDokument33 SeitenConfined Space SafetyEneyo VictorNoch keine Bewertungen
- An Improved Ant Colony Algorithm and Its ApplicatiDokument10 SeitenAn Improved Ant Colony Algorithm and Its ApplicatiI n T e R e Y eNoch keine Bewertungen
- Technical CommunicationDokument35 SeitenTechnical CommunicationPrecious Tinashe NyakabauNoch keine Bewertungen
- Gujarat Technological University: Aeronautical EngineeringDokument16 SeitenGujarat Technological University: Aeronautical EngineeringumodiNoch keine Bewertungen
- Chapter 04Dokument3 SeitenChapter 04gebreNoch keine Bewertungen