Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- PM Risk For DummiesDokument52 SeitenPM Risk For DummiesFelix Rinaldi100% (8)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Augmented FeedbackDokument54 SeitenAugmented FeedbackAhmad KhuwarizmyNoch keine Bewertungen
- CPCCCM2006 - Learner Guide V1.0Dokument89 SeitenCPCCCM2006 - Learner Guide V1.0Sid SharmaNoch keine Bewertungen
- Speed Control of DC Motor Using Fuzzy Logic ControllerDokument28 SeitenSpeed Control of DC Motor Using Fuzzy Logic ControllerSiddharth Singh0% (1)
- Lp-7 2019-Ratio and ProportionDokument5 SeitenLp-7 2019-Ratio and Proportionroy c. diocampoNoch keine Bewertungen
- Developing An OutlineDokument18 SeitenDeveloping An OutlineEnrico Dela CruzNoch keine Bewertungen
- (i) (i) N i=1 i M 0 β n i=1 i: for do for doDokument1 Seite(i) (i) N i=1 i M 0 β n i=1 i: for do for doluatnvNoch keine Bewertungen
- RF Pseudocode PDFDokument1 SeiteRF Pseudocode PDFluatnvNoch keine Bewertungen
- Name: NGUYEN VU LUAT (17160502) E-Learning: 0: Period MON TUE WED THU FRI SATDokument2 SeitenName: NGUYEN VU LUAT (17160502) E-Learning: 0: Period MON TUE WED THU FRI SATluatnvNoch keine Bewertungen
- Continuum Hw3 (2017)Dokument2 SeitenContinuum Hw3 (2017)luatnvNoch keine Bewertungen
- Career Tree EssayDokument2 SeitenCareer Tree Essayapi-437674439Noch keine Bewertungen
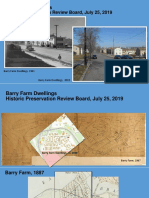
- Barry Farm Powerpoint SlidesDokument33 SeitenBarry Farm Powerpoint SlidessarahNoch keine Bewertungen
- Practice Makes Perfect English Conversation UNIT 9Dokument10 SeitenPractice Makes Perfect English Conversation UNIT 9Thaís C C MirandaNoch keine Bewertungen
- Vertical Axis Wind Turbine ProjDokument2 SeitenVertical Axis Wind Turbine Projmacsan sanchezNoch keine Bewertungen
- Chapter - 5 Theory of Consumer BehaviourDokument30 SeitenChapter - 5 Theory of Consumer BehaviourpoojNoch keine Bewertungen
- DSSSSPDokument3 SeitenDSSSSPChris BalmacedaNoch keine Bewertungen
- Cee 2005 - 06Dokument129 SeitenCee 2005 - 06iloveeggxPNoch keine Bewertungen
- Strong PasswordDokument2 SeitenStrong PasswordluciangeNoch keine Bewertungen
- Mmims5elesson BiomesDokument3 SeitenMmims5elesson Biomesapi-490524730100% (1)
- Collaborative Planning Template W CaptionDokument5 SeitenCollaborative Planning Template W Captionapi-297728751Noch keine Bewertungen
- 1 BN Sintax SemanticsDokument10 Seiten1 BN Sintax SemanticsJackNoch keine Bewertungen
- Affective DomainDokument3 SeitenAffective DomainJm Enriquez Dela Cruz50% (2)
- INV201 ReadParameterDokument3 SeitenINV201 ReadParameterRaul ArbaniesNoch keine Bewertungen
- Cambridge IGCSE ™: Co-Ordinated Sciences 0654/61 October/November 2022Dokument9 SeitenCambridge IGCSE ™: Co-Ordinated Sciences 0654/61 October/November 2022wangfeifei620Noch keine Bewertungen
- Sample Test Paper 2012 NucleusDokument14 SeitenSample Test Paper 2012 NucleusVikramNoch keine Bewertungen
- L53 & L54 Environmental Impact Assessment (Eng) - WebDokument31 SeitenL53 & L54 Environmental Impact Assessment (Eng) - WebplyanaNoch keine Bewertungen
- Unit 9 Caring and Sharing Year 2 KSSR Lesson PlanDokument6 SeitenUnit 9 Caring and Sharing Year 2 KSSR Lesson PlanopheliavioletNoch keine Bewertungen
- COMP2101 / CS20S - Discrete Mathematics Generating Functions and Recurrence RelationsDokument7 SeitenCOMP2101 / CS20S - Discrete Mathematics Generating Functions and Recurrence RelationsjevanjuniorNoch keine Bewertungen
- 500 Grammar Based Conversation Question12Dokument16 Seiten500 Grammar Based Conversation Question12Ivo Barry Ward100% (1)
- Healthcare ProfessionalismDokument28 SeitenHealthcare ProfessionalismAnjo CincoNoch keine Bewertungen
- Kolkata City Accident Report - 2018Dokument48 SeitenKolkata City Accident Report - 2018anon_109699702Noch keine Bewertungen
- Saint Albert Polytechnic College, Inc. Bachelor of Science in Office AdministrationDokument15 SeitenSaint Albert Polytechnic College, Inc. Bachelor of Science in Office AdministrationAustin Grey Pineda MacoteNoch keine Bewertungen
- Fendrick Govt 720 Global Problem EssayDokument5 SeitenFendrick Govt 720 Global Problem Essayapi-283893191Noch keine Bewertungen
- Raglio 2015 Effects of Music and Music Therapy On Mood in Neurological Patients PDFDokument12 SeitenRaglio 2015 Effects of Music and Music Therapy On Mood in Neurological Patients PDFsimaso0% (1)