Das könnte Ihnen auch gefallen
- MITOCW - MITRES2 - 002s10linear - Lec10 - 300k-mp4: ProfessorDokument21 SeitenMITOCW - MITRES2 - 002s10linear - Lec10 - 300k-mp4: ProfessorDanielNoch keine Bewertungen
- gzG2p Su8Vw PDFDokument21 SeitengzG2p Su8Vw PDFLuqman Al HakimNoch keine Bewertungen
- L27jvpzoz yDokument17 SeitenL27jvpzoz yBastian DewiNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10linear - Lec05 - 300k-mp4: ProfessorDokument20 SeitenMITOCW - MITRES2 - 002s10linear - Lec05 - 300k-mp4: ProfessorDanielNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10linear - Lec02 - 300k-mp4: ProfessorDokument21 SeitenMITOCW - MITRES2 - 002s10linear - Lec02 - 300k-mp4: ProfessorDanielNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10nonlinear - Lec08 - 300k-mp4: ProfessorDokument12 SeitenMITOCW - MITRES2 - 002s10nonlinear - Lec08 - 300k-mp4: ProfessorFelipe Dornellas SilvaNoch keine Bewertungen
- Theory and Computation of Tensors: Multi-Dimensional ArraysVon EverandTheory and Computation of Tensors: Multi-Dimensional ArraysNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10nonlinear - Lec11 - 300k-mp4: ProfessorDokument15 SeitenMITOCW - MITRES2 - 002s10nonlinear - Lec11 - 300k-mp4: ProfessorBastian DewiNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10nonlinear - Lec02 - 300k-mp4: ProfessorDokument22 SeitenMITOCW - MITRES2 - 002s10nonlinear - Lec02 - 300k-mp4: ProfessorAhmed EwisNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10nonlinear - Lec05 - 300k-mp4: ProfessorDokument19 SeitenMITOCW - MITRES2 - 002s10nonlinear - Lec05 - 300k-mp4: ProfessorBastian DewiNoch keine Bewertungen
- GSA Training Notes Dynamic Analysis: 1 DynamicsDokument10 SeitenGSA Training Notes Dynamic Analysis: 1 DynamicsMARIO HUAMANNoch keine Bewertungen
- Implicit & Explicit Finite Element Analysis - CAE ANALYSISDokument2 SeitenImplicit & Explicit Finite Element Analysis - CAE ANALYSISsmartpurushothNoch keine Bewertungen
- Gec223 - Fluid Mechanics IDokument8 SeitenGec223 - Fluid Mechanics IdoghorNoch keine Bewertungen
- Monte Carlo Simulation in Statistical Physics An IDokument36 SeitenMonte Carlo Simulation in Statistical Physics An IMANISHA SHARMANoch keine Bewertungen
- Degree of Freedom AnalysisDokument7 SeitenDegree of Freedom AnalysisFirdaus SeptiawanNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10nonlinear - Lec12 - 300k-mp4: NarratorDokument16 SeitenMITOCW - MITRES2 - 002s10nonlinear - Lec12 - 300k-mp4: NarratorBastian DewiNoch keine Bewertungen
- Implicit & Explicit Finite Element Analysis - CAE ANALYSISDokument3 SeitenImplicit & Explicit Finite Element Analysis - CAE ANALYSISDhaval JaniNoch keine Bewertungen
- Ussor 2012 Ecr Cs-1 (BMK)Dokument47 SeitenUssor 2012 Ecr Cs-1 (BMK)RajeshNoch keine Bewertungen
- Lec 8Dokument39 SeitenLec 8GooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Lec 39Dokument20 SeitenLec 39tamizhanNoch keine Bewertungen
- NuMeths (Unit1)Dokument34 SeitenNuMeths (Unit1)kathrin_jazz26Noch keine Bewertungen
- Dimensional Analysis and Scaling: 1.1 Mathematical ModelsDokument29 SeitenDimensional Analysis and Scaling: 1.1 Mathematical ModelslynnetanNoch keine Bewertungen
- Classical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 20Dokument30 SeitenClassical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 20AMIT SINGHNoch keine Bewertungen
- Gord Is 1979Dokument12 SeitenGord Is 1979NixonNoch keine Bewertungen
- Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1Dokument19 SeitenStructural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1vkagarwaNoch keine Bewertungen
- DynamicsDokument57 SeitenDynamicsrobliutpg.com.auNoch keine Bewertungen
- A First Look at Perturbation TheoryVon EverandA First Look at Perturbation TheoryBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Fem NotepadDokument5 SeitenFem NotepadVivek KhareNoch keine Bewertungen
- Scaling and Model Simplification: Chapter ThreeDokument18 SeitenScaling and Model Simplification: Chapter ThreeNAREN STEVE CASTIBLANCO GUERRANoch keine Bewertungen
- Equivalent Nodal ValuesDokument27 SeitenEquivalent Nodal Values1005641Noch keine Bewertungen
- MTamis ConstraintBasedPhysicsSolverDokument31 SeitenMTamis ConstraintBasedPhysicsSolverlucianobuglioniNoch keine Bewertungen
- Path Integral Methods For The Dynamics of Stochastic and Disordered SystemsDokument37 SeitenPath Integral Methods For The Dynamics of Stochastic and Disordered SystemsMati dell'ErbaNoch keine Bewertungen
- Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, MadrasDokument40 SeitenFinite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, MadrasMarijaNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10linear - Lec06 - 300k-mp4: ProfessorDokument17 SeitenMITOCW - MITRES2 - 002s10linear - Lec06 - 300k-mp4: ProfessorDanielNoch keine Bewertungen
- Introduction To Finite Element AnalysisDokument20 SeitenIntroduction To Finite Element AnalysisVishnu Vardhan Reddy GangapuramNoch keine Bewertungen
- Lec34 PDFDokument28 SeitenLec34 PDFmb5bariyaNoch keine Bewertungen
- Week1 PDFDokument23 SeitenWeek1 PDFRyan DavisNoch keine Bewertungen
- Implicit Vs ExplicitDokument4 SeitenImplicit Vs ExplicitAttique JavaidNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10nonlinear - Lec10 - 300k-mp4: ProfessorDokument24 SeitenMITOCW - MITRES2 - 002s10nonlinear - Lec10 - 300k-mp4: ProfessorBastian DewiNoch keine Bewertungen
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4Dokument19 SeitenAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4abimanaNoch keine Bewertungen
- 3E04 - Mass Transfer 2 Term, 2011 A Crash Course in Differential EquationsDokument4 Seiten3E04 - Mass Transfer 2 Term, 2011 A Crash Course in Differential EquationsReb19900% (1)
- Key Concepts1d BDokument4 SeitenKey Concepts1d BBillNoch keine Bewertungen
- 9 G1 IDAqr WKGDokument23 Seiten9 G1 IDAqr WKGTheoNoch keine Bewertungen
- 1972 - BatheDokument9 Seiten1972 - BatheChiara GastaldiNoch keine Bewertungen
- Lec1 PDFDokument24 SeitenLec1 PDFAbhishek AroraNoch keine Bewertungen
- Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurDokument18 SeitenComputational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurRanganathan .kNoch keine Bewertungen
- Foundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 12Dokument14 SeitenFoundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 12mahesh dNoch keine Bewertungen
- Lec 37Dokument51 SeitenLec 37Abhishek AroraNoch keine Bewertungen
- Linear EquationsDokument12 SeitenLinear EquationsTasmia ZakariahNoch keine Bewertungen
- Lec 24Dokument25 SeitenLec 24tamizhanNoch keine Bewertungen
- Non-Linear Vibration Prof. S.K. Dwivedy Department of Mechanical Engineering Indian Institute of Technology, GuwahatiDokument28 SeitenNon-Linear Vibration Prof. S.K. Dwivedy Department of Mechanical Engineering Indian Institute of Technology, GuwahatiAbhishek AroraNoch keine Bewertungen
- Damped Free ExampleDokument12 SeitenDamped Free ExampleEx HNoch keine Bewertungen
- Dynamics of Physical Systems - Lec01Dokument24 SeitenDynamics of Physical Systems - Lec01rdsrajNoch keine Bewertungen
- NPTEL FEM Lec2Dokument30 SeitenNPTEL FEM Lec2EliNoch keine Bewertungen
- Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, MadrasDokument27 SeitenFinite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madrasnataraj deshpandeNoch keine Bewertungen
- Modal Analysis GerritvisserDokument11 SeitenModal Analysis GerritvisserSathiyaseelan SubramaniNoch keine Bewertungen
- bf01589112 PDFDokument34 Seitenbf01589112 PDFMichael ZhaoNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10nonlinear - Lec12 - 300k-mp4: NarratorDokument16 SeitenMITOCW - MITRES2 - 002s10nonlinear - Lec12 - 300k-mp4: NarratorBastian DewiNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10nonlinear - Lec11 - 300k-mp4: ProfessorDokument15 SeitenMITOCW - MITRES2 - 002s10nonlinear - Lec11 - 300k-mp4: ProfessorBastian DewiNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10nonlinear - Lec09 - 300k-mp4: ProfessorDokument13 SeitenMITOCW - MITRES2 - 002s10nonlinear - Lec09 - 300k-mp4: ProfessorBastian DewiNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10nonlinear - Lec10 - 300k-mp4: ProfessorDokument24 SeitenMITOCW - MITRES2 - 002s10nonlinear - Lec10 - 300k-mp4: ProfessorBastian DewiNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10nonlinear - Lec05 - 300k-mp4: ProfessorDokument19 SeitenMITOCW - MITRES2 - 002s10nonlinear - Lec05 - 300k-mp4: ProfessorBastian DewiNoch keine Bewertungen
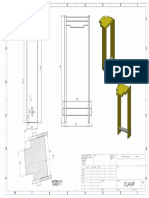
- Clamp - Sheet1 PDFDokument1 SeiteClamp - Sheet1 PDFBastian DewiNoch keine Bewertungen
- Clamp - Sheet1Dokument1 SeiteClamp - Sheet1Bastian DewiNoch keine Bewertungen
- Performance of 2d Frame OptimizationDokument21 SeitenPerformance of 2d Frame OptimizationBastian DewiNoch keine Bewertungen
- QHADokument82 SeitenQHABastian DewiNoch keine Bewertungen
- Plat Atas - Sheet1Dokument1 SeitePlat Atas - Sheet1Bastian DewiNoch keine Bewertungen
- Q1E Presentation PDFDokument22 SeitenQ1E Presentation PDFIsmailNoch keine Bewertungen
- Evidence and The Policymaking Process: Louise ShaxsonDokument19 SeitenEvidence and The Policymaking Process: Louise ShaxsonNemanja BorojevicNoch keine Bewertungen
- Gardiner - Stochastic MeethodsDokument10 SeitenGardiner - Stochastic MeethodsganjeyNoch keine Bewertungen
- UPD Math 55 ExercisesDokument3 SeitenUPD Math 55 ExercisesAbbyNoch keine Bewertungen
- Limit TheoremsDokument13 SeitenLimit TheoremsFatima Dy100% (1)
- Problem Solving and Decision Making - IIDokument18 SeitenProblem Solving and Decision Making - IINandu KrishNoch keine Bewertungen
- Modified Syllabus of Control SystemDokument2 SeitenModified Syllabus of Control SystemDigambar PatilNoch keine Bewertungen
- The Introduction To Engineering CourseDokument9 SeitenThe Introduction To Engineering CourseAndreea MadalinaNoch keine Bewertungen
- Yalmip A Toolbox For Modeling and Optimization in MATLAB: Efberg Laboratory, CH-8092Dokument6 SeitenYalmip A Toolbox For Modeling and Optimization in MATLAB: Efberg Laboratory, CH-8092BenjaminNoch keine Bewertungen
- CH 7Dokument36 SeitenCH 7Legese TusseNoch keine Bewertungen
- 1 - 9 FGHBHJDokument12 Seiten1 - 9 FGHBHJJiya NamaNoch keine Bewertungen
- Complete Advanced Level Mathematics Pure Mathematics PDFDokument512 SeitenComplete Advanced Level Mathematics Pure Mathematics PDFAnderson AlfredNoch keine Bewertungen
- Equivalence TestingDokument3 SeitenEquivalence TestingHenry DunaNoch keine Bewertungen
- Multiple Linear Regressions For Predicting Rainfall For BangladeshDokument4 SeitenMultiple Linear Regressions For Predicting Rainfall For BangladeshsabihuddinNoch keine Bewertungen
- Writing A Research Article: by Shumank Deep PHD (Candidate) School of Architecture and Built EnvironmentDokument12 SeitenWriting A Research Article: by Shumank Deep PHD (Candidate) School of Architecture and Built EnvironmentShumank SrivastavaNoch keine Bewertungen
- © 2017 by Mcgraw-Hill Education. Permission Required For Reproduction or DisplayDokument20 Seiten© 2017 by Mcgraw-Hill Education. Permission Required For Reproduction or DisplayMuhammad Raza RafiqNoch keine Bewertungen
- MTS423 - Functional AnalysisDokument20 SeitenMTS423 - Functional AnalysisEmmanuel AyomikunNoch keine Bewertungen
- Numerical Methods: Skriptyan N.H. SyuhriDokument29 SeitenNumerical Methods: Skriptyan N.H. SyuhriDzakaTriPutraNoch keine Bewertungen
- B.Pharmacy IY - R17 - Remedial MathsDokument2 SeitenB.Pharmacy IY - R17 - Remedial MathsrajeshNoch keine Bewertungen
- Comparison of Various Wiener Model Identification Approach in Modelling Nonlinear ProcessDokument7 SeitenComparison of Various Wiener Model Identification Approach in Modelling Nonlinear ProcessmichelleNoch keine Bewertungen
- Surigao State College of Technology - Malimono Campus Learning ModuleDokument4 SeitenSurigao State College of Technology - Malimono Campus Learning ModuleElla Clent moralesNoch keine Bewertungen
- Developing A Free Energy Using A Magnet WithoutDokument11 SeitenDeveloping A Free Energy Using A Magnet WithoutJohn Carlo Bacalando IINoch keine Bewertungen
- ChromatographyDokument1 SeiteChromatographyManP13Noch keine Bewertungen
- Kronecker ProductDokument10 SeitenKronecker ProductIgnacio MolinaNoch keine Bewertungen
- ETF5930 AssignmentDokument22 SeitenETF5930 Assignment王勃伟Noch keine Bewertungen
- Critical Thinking Skills For Enginners Book 1Dokument24 SeitenCritical Thinking Skills For Enginners Book 1Javier Mardones D'Appollonio33% (3)
- Nonlinear Control: Properties of Nonlinear SystemsDokument5 SeitenNonlinear Control: Properties of Nonlinear SystemsRobert KelevraNoch keine Bewertungen
- Module 4 T Test For IndependentDokument8 SeitenModule 4 T Test For IndependentMaxine SarigumbaNoch keine Bewertungen
- Kruithof Double Factor MoreDokument9 SeitenKruithof Double Factor MoreAtique Ur Rehman KhattakNoch keine Bewertungen
- Xercise: Single Correct (Objective Questions)Dokument16 SeitenXercise: Single Correct (Objective Questions)Adharshan NNoch keine Bewertungen