Das könnte Ihnen auch gefallen
- Instructor's Solution Manual For Neural NetworksDokument40 SeitenInstructor's Solution Manual For Neural NetworksshenalNoch keine Bewertungen
- Instructor Solution Manual To Neural Networks and Deep Learning A Textbook Solutions 3319944622 9783319944623 - CompressDokument40 SeitenInstructor Solution Manual To Neural Networks and Deep Learning A Textbook Solutions 3319944622 9783319944623 - CompressHassam HafeezNoch keine Bewertungen
- Asen 3112 Lab 2Dokument13 SeitenAsen 3112 Lab 2api-497657561Noch keine Bewertungen
- Homework1 2023Dokument3 SeitenHomework1 2023HAO WUNoch keine Bewertungen
- Simple Perceptrons: 1 NonlinearityDokument5 SeitenSimple Perceptrons: 1 NonlinearityAdnan AmeenNoch keine Bewertungen
- Space-Filling Curves An Introduction: Department of Informatics Technical University MunichDokument15 SeitenSpace-Filling Curves An Introduction: Department of Informatics Technical University MunichRizo MwitaNoch keine Bewertungen
- Competitive Mixtures of Simple Neurons: Karthik Sridharan Matthew J. Beal Venu GovindarajuDokument4 SeitenCompetitive Mixtures of Simple Neurons: Karthik Sridharan Matthew J. Beal Venu GovindarajuAbbé BusoniNoch keine Bewertungen
- 4.2 Mean Value TheoremDokument9 Seiten4.2 Mean Value TheoremRaju SharmaNoch keine Bewertungen
- Ma 204 5Dokument61 SeitenMa 204 5Roshan SainiNoch keine Bewertungen
- Assignment IDokument2 SeitenAssignment IPLAVAK DASNoch keine Bewertungen
- Work, Energy, and PowerDokument13 SeitenWork, Energy, and Powerエンジェル リンNoch keine Bewertungen
- Learning RulesDokument60 SeitenLearning RulesAkhil AroraNoch keine Bewertungen
- CH8Solutions PDFDokument31 SeitenCH8Solutions PDFRalphNoch keine Bewertungen
- Nobel IdentitiesDokument6 SeitenNobel Identitiesihab411Noch keine Bewertungen
- NN Sheet1Dokument2 SeitenNN Sheet1Ahmed HashimNoch keine Bewertungen
- Hebbian Learning and Gradient Descent Learning: Neural Computation: Lecture 5Dokument20 SeitenHebbian Learning and Gradient Descent Learning: Neural Computation: Lecture 5richaNoch keine Bewertungen
- Ch4 Notes Transformations 2024Dokument12 SeitenCh4 Notes Transformations 2024Jaspar GlagovsNoch keine Bewertungen
- Vtuupdates - Numerical Solution of PDEDokument39 SeitenVtuupdates - Numerical Solution of PDEShanthi.VNoch keine Bewertungen
- Introduction To Algorithms: NP-CompleteDokument19 SeitenIntroduction To Algorithms: NP-CompleteRima MkhNoch keine Bewertungen
- hw01 Linear System ControlsDokument5 Seitenhw01 Linear System ControlsAnselm AdrianNoch keine Bewertungen
- L15 Autoregressive and Reversible ModelsDokument7 SeitenL15 Autoregressive and Reversible Modelsparvathyp220246ecNoch keine Bewertungen
- MM HA3 SolutionDokument21 SeitenMM HA3 SolutionVojvodaAlbertNoch keine Bewertungen
- ME 4135 Robot Matrices L3Dokument55 SeitenME 4135 Robot Matrices L3Leonardo SibaraniNoch keine Bewertungen
- Linear Algebra by Examples: University of The Punjab, MA110Dokument13 SeitenLinear Algebra by Examples: University of The Punjab, MA110PUBG StudioNoch keine Bewertungen
- vt59.2708-2175333085 1045606352276604 3813872710501531648 n.pdfLinear-Programming - PDF NC Cat 103& NC e PDFDokument7 Seitenvt59.2708-2175333085 1045606352276604 3813872710501531648 n.pdfLinear-Programming - PDF NC Cat 103& NC e PDFKarly ValinoNoch keine Bewertungen
- 3G4 Flash Calculations1Dokument9 Seiten3G4 Flash Calculations1ahmedNoch keine Bewertungen
- Exercise 4 - 2022Dokument4 SeitenExercise 4 - 2022Shivang MathurNoch keine Bewertungen
- 1.2 - Gaussian EliminationDokument23 Seiten1.2 - Gaussian EliminationMd. Abdul KaderNoch keine Bewertungen
- Kevin Swingler - Lecture 3: Delta RuleDokument10 SeitenKevin Swingler - Lecture 3: Delta RuleRoots999Noch keine Bewertungen
- Module 4 - Calculus - 21-22-1Dokument10 SeitenModule 4 - Calculus - 21-22-1Jeremie RelampagoNoch keine Bewertungen
- Exercises On Multiple IntegralsDokument4 SeitenExercises On Multiple IntegralsEdmond ZNoch keine Bewertungen
- Prog 4Dokument3 SeitenProg 4Kayana Dixon DeniseNoch keine Bewertungen
- Unit 1Dokument23 SeitenUnit 1shruthikagudemNoch keine Bewertungen
- Week 2Dokument17 SeitenWeek 2madhuNoch keine Bewertungen
- The Finite Element Method For One-Dimensional ProblemsDokument13 SeitenThe Finite Element Method For One-Dimensional ProblemsAshokNoch keine Bewertungen
- Sasane Amol Sasane Sara Maad A Friendly Approach To ComplexDokument219 SeitenSasane Amol Sasane Sara Maad A Friendly Approach To ComplexStrahinja DonicNoch keine Bewertungen
- V. Differentiating Fourier Series: Example V.1. Let F (N, X) : 0 If - 1/nDokument5 SeitenV. Differentiating Fourier Series: Example V.1. Let F (N, X) : 0 If - 1/njose2017Noch keine Bewertungen
- Convex Sets and Jensen's InequalityDokument22 SeitenConvex Sets and Jensen's InequalityNou ChannarithNoch keine Bewertungen
- 3 DeltaRule PDFDokument10 Seiten3 DeltaRule PDFKrishnamohanNoch keine Bewertungen
- Partial Differential EquationsDokument95 SeitenPartial Differential EquationsharshitNoch keine Bewertungen
- Material1 LatexDokument7 SeitenMaterial1 LatexJuan GNoch keine Bewertungen
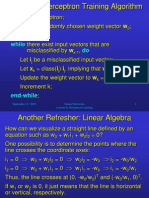
- Refresher: Perceptron Training AlgorithmDokument12 SeitenRefresher: Perceptron Training Algorithmeduardo_quintanill_3Noch keine Bewertungen
- Vector Spaces: Theory and PracticeDokument23 SeitenVector Spaces: Theory and PracticeSoumyajit BagchiNoch keine Bewertungen
- Rational Hyperholomorphic Functions In: Daniel Alpay, Michael Shapiro, Dan VolokDokument28 SeitenRational Hyperholomorphic Functions In: Daniel Alpay, Michael Shapiro, Dan VolokAreej FatimaNoch keine Bewertungen
- Quaternions and Perturbed Kepler Problem - Waldvogel 2005Dokument14 SeitenQuaternions and Perturbed Kepler Problem - Waldvogel 2005TBaenasNoch keine Bewertungen
- MM Reference 03 Mathematical Model HCDokument9 SeitenMM Reference 03 Mathematical Model HCalisantosodarrian14Noch keine Bewertungen
- RBF Network XOR ProblemDokument16 SeitenRBF Network XOR ProblemSaurabh KumarNoch keine Bewertungen
- AE675: Introduction To Finite Element Method: Indian Institute of Technology KanpurDokument15 SeitenAE675: Introduction To Finite Element Method: Indian Institute of Technology KanpurSiddhartha SrivastavaNoch keine Bewertungen
- One Dimensional Convection: Interpolation Models For CFD: Gerald Recktenwald January 21, 2019Dokument24 SeitenOne Dimensional Convection: Interpolation Models For CFD: Gerald Recktenwald January 21, 2019Level ThreeNoch keine Bewertungen
- Lecture 10 HandoutDokument5 SeitenLecture 10 HandoutIvette AyalaNoch keine Bewertungen
- Instantaneous Rate of Change at A Point: Learning ObjectivesDokument7 SeitenInstantaneous Rate of Change at A Point: Learning ObjectivesAlan PeterNoch keine Bewertungen
- Financial Modeling With Levy ProcessesDokument101 SeitenFinancial Modeling With Levy ProcessesBranden KeckNoch keine Bewertungen
- Sem3 PHSH CC5Dokument1 SeiteSem3 PHSH CC5Řůpäm ŔøýNoch keine Bewertungen
- CHE 492 HW 3 Abdulaziz AlhoutiDokument8 SeitenCHE 492 HW 3 Abdulaziz AlhoutiTimelessNoch keine Bewertungen
- SVM ExampleDokument10 SeitenSVM ExampleYash AgarwalNoch keine Bewertungen
- CS423 Data Warehousing and Data Mining: Dr. Hammad AfzalDokument67 SeitenCS423 Data Warehousing and Data Mining: Dr. Hammad AfzalZafar IqbalNoch keine Bewertungen
- Image Manipulation in MATLAB Due 11/2 at 11:59 PMDokument9 SeitenImage Manipulation in MATLAB Due 11/2 at 11:59 PMJordan ToutsopNoch keine Bewertungen
- EhsanDokument8 SeitenEhsanAmirul AriffNoch keine Bewertungen
- CH 22Dokument22 SeitenCH 22Cool GuyNoch keine Bewertungen
- JOM-e - The Symposium On Computational Methods in Materials EducationDokument1 SeiteJOM-e - The Symposium On Computational Methods in Materials Educationzym1003Noch keine Bewertungen
- 55 Learning Objective Fort LnsDokument2 Seiten55 Learning Objective Fort Lnszym1003Noch keine Bewertungen
- 4.2 4.2 Convex Sets, Convex Hulls and Linear Separability: X X C C X XDokument3 Seiten4.2 4.2 Convex Sets, Convex Hulls and Linear Separability: X X C C X Xzym1003Noch keine Bewertungen
- 12 The Advent of Modern NeuroscienceDokument3 Seiten12 The Advent of Modern Neurosciencezym1003Noch keine Bewertungen
- 3.1 3.1 Neuron Abstraction: 40 MV WithDokument3 Seiten3.1 3.1 Neuron Abstraction: 40 MV Withzym1003Noch keine Bewertungen
- Introducting MathematicaDokument16 SeitenIntroducting Mathematicazym1003Noch keine Bewertungen
- 43 Space of Boolean FunctionsDokument3 Seiten43 Space of Boolean Functionszym1003Noch keine Bewertungen
- Matlab Deep Learning SeriesDokument6 SeitenMatlab Deep Learning Serieszym1003Noch keine Bewertungen
- MatML - A Data Interchange Markup LanguageDokument2 SeitenMatML - A Data Interchange Markup Languagezym1003Noch keine Bewertungen
- 145GeometryofFuzzySets PDFDokument1 Seite145GeometryofFuzzySets PDFzym1003Noch keine Bewertungen
- Development and Innovation of Superalloy in ChinaDokument8 SeitenDevelopment and Innovation of Superalloy in Chinazym1003Noch keine Bewertungen
- Life After The PHD: Frédo Durand Mit CsailDokument10 SeitenLife After The PHD: Frédo Durand Mit Csailzym1003Noch keine Bewertungen
- Chapter2-Applications and Future Trends of Artificial Intelligence-FuzzyLogicDokument17 SeitenChapter2-Applications and Future Trends of Artificial Intelligence-FuzzyLogicSMRITI SETHINoch keine Bewertungen
- What Is A RobotDokument4 SeitenWhat Is A Robotmardochée tchobwéNoch keine Bewertungen
- Transforming Conversational AI: Exploring The Power of Large Language Models in Interactive Conversational Agents 1st Edition Michael MctearDokument68 SeitenTransforming Conversational AI: Exploring The Power of Large Language Models in Interactive Conversational Agents 1st Edition Michael Mctearheather.flores371100% (5)
- 利用人工智能促进量子退火器解决问题Dokument165 Seiten利用人工智能促进量子退火器解决问题tian abeiNoch keine Bewertungen
- Wolkite UniversityDokument42 SeitenWolkite UniversityISHETU100% (3)
- Pitcany GithubDokument10 SeitenPitcany GithubPitcany githubNoch keine Bewertungen
- Next-Gen Fulfillment & Sortation: Adopting Artificial IntelligenceDokument31 SeitenNext-Gen Fulfillment & Sortation: Adopting Artificial IntelligenceheymuraliNoch keine Bewertungen
- Practice. Neuro-Fuzzy Logic Systems Matlab Toolbox GuiDokument85 SeitenPractice. Neuro-Fuzzy Logic Systems Matlab Toolbox GuiMutiaraning PertiwiNoch keine Bewertungen
- SBP - Rule Based System Forward ChainingDokument14 SeitenSBP - Rule Based System Forward ChainingTU ElektroNoch keine Bewertungen
- Compliance and WhistleblowingDokument30 SeitenCompliance and WhistleblowingSofia LossleyNoch keine Bewertungen
- Course Syllabus CH160 4Q2021 Batch 2018Dokument9 SeitenCourse Syllabus CH160 4Q2021 Batch 2018Astra BeckettNoch keine Bewertungen
- Machine Learning-Based Adaptive Intelligence: The Future of CybersecurityDokument11 SeitenMachine Learning-Based Adaptive Intelligence: The Future of CybersecurityJorge VargasNoch keine Bewertungen
- Summary of Bill Joy's, "Why The Future Doesn't Need Us,"Dokument3 SeitenSummary of Bill Joy's, "Why The Future Doesn't Need Us,"angel mae tolentinoNoch keine Bewertungen
- NlpslideDokument21 SeitenNlpslideMelkamu ZinabuNoch keine Bewertungen
- Vit Mca 29-08-2023 PDFDokument19 SeitenVit Mca 29-08-2023 PDFKaran KaranNoch keine Bewertungen
- A Supervised Learning Methodology For Real-Time Disguised Face Recognition in The WildDokument6 SeitenA Supervised Learning Methodology For Real-Time Disguised Face Recognition in The WildAnup Kumar PaulNoch keine Bewertungen
- Paule A1Dokument2 SeitenPaule A1tristan pauleNoch keine Bewertungen
- Feature Selection: January 2016Dokument10 SeitenFeature Selection: January 2016ramadeviNoch keine Bewertungen
- Stephen Hawking - 'Transcendence Looks at The Implications of Artificial Intelligence - But Are We Taking AI Seriously Enough - X 4'Dokument2 SeitenStephen Hawking - 'Transcendence Looks at The Implications of Artificial Intelligence - But Are We Taking AI Seriously Enough - X 4'yeeleongNoch keine Bewertungen
- BackpropagationDokument7 SeitenBackpropagationShruti JamsandekarNoch keine Bewertungen
- The Future Lawyer Lecture at Nkumba University by LubogoDokument25 SeitenThe Future Lawyer Lecture at Nkumba University by LubogolubogoNoch keine Bewertungen
- Transfer Learning For Image ClassificationDokument5 SeitenTransfer Learning For Image ClassificationBushra RafiaNoch keine Bewertungen
- Weka Final Lab-KpswDokument137 SeitenWeka Final Lab-KpswchatlamalleshwarNoch keine Bewertungen
- Ju Complete Face Recovery GAN Unsupervised Joint Face Rotation and De-Occlusion WACV 2022 PaperDokument11 SeitenJu Complete Face Recovery GAN Unsupervised Joint Face Rotation and De-Occlusion WACV 2022 PaperBiponjot KaurNoch keine Bewertungen
- Oral ExamDokument9 SeitenOral Examollie.martinssonNoch keine Bewertungen
- AI10 Jan 3rd Issue VFDokument11 SeitenAI10 Jan 3rd Issue VFIzzuddin KhairuddinNoch keine Bewertungen
- Personalized Internet Assessor - Russian (BR)Dokument2 SeitenPersonalized Internet Assessor - Russian (BR)fabio9187Noch keine Bewertungen
- Image Generation From CaptionDokument10 SeitenImage Generation From CaptionijscaiNoch keine Bewertungen
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveVon EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNoch keine Bewertungen
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldVon EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (55)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldVon EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (107)
- Generative AI: The Insights You Need from Harvard Business ReviewVon EverandGenerative AI: The Insights You Need from Harvard Business ReviewBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewVon EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewBewertung: 4.5 von 5 Sternen4.5/5 (104)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessVon EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNoch keine Bewertungen
- Artificial Intelligence: A Guide for Thinking HumansVon EverandArtificial Intelligence: A Guide for Thinking HumansBewertung: 4.5 von 5 Sternen4.5/5 (30)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceVon EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceBewertung: 5 von 5 Sternen5/5 (5)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziVon Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNoch keine Bewertungen
- The Roadmap to AI Mastery: A Guide to Building and Scaling ProjectsVon EverandThe Roadmap to AI Mastery: A Guide to Building and Scaling ProjectsNoch keine Bewertungen
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeVon EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeBewertung: 4.5 von 5 Sternen4.5/5 (69)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkVon EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkBewertung: 4 von 5 Sternen4/5 (7)
- Working with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Von EverandWorking with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Bewertung: 5 von 5 Sternen5/5 (5)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesVon EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesBewertung: 4.5 von 5 Sternen4.5/5 (13)
- T-Minus AI: Humanity's Countdown to Artificial Intelligence and the New Pursuit of Global PowerVon EverandT-Minus AI: Humanity's Countdown to Artificial Intelligence and the New Pursuit of Global PowerBewertung: 4 von 5 Sternen4/5 (4)
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsVon EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNoch keine Bewertungen
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceVon EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceBewertung: 4.5 von 5 Sternen4.5/5 (38)
- Competing in the Age of AI: Strategy and Leadership When Algorithms and Networks Run the WorldVon EverandCompeting in the Age of AI: Strategy and Leadership When Algorithms and Networks Run the WorldBewertung: 4.5 von 5 Sternen4.5/5 (21)
- The Digital Mind: How Science is Redefining HumanityVon EverandThe Digital Mind: How Science is Redefining HumanityBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Hands-On System Design: Learn System Design, Scaling Applications, Software Development Design Patterns with Real Use-CasesVon EverandHands-On System Design: Learn System Design, Scaling Applications, Software Development Design Patterns with Real Use-CasesNoch keine Bewertungen
- Python Machine Learning - Third Edition: Machine Learning and Deep Learning with Python, scikit-learn, and TensorFlow 2, 3rd EditionVon EverandPython Machine Learning - Third Edition: Machine Learning and Deep Learning with Python, scikit-learn, and TensorFlow 2, 3rd EditionBewertung: 5 von 5 Sternen5/5 (2)
- Architects of Intelligence: The truth about AI from the people building itVon EverandArchitects of Intelligence: The truth about AI from the people building itBewertung: 4.5 von 5 Sternen4.5/5 (21)