Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- 5 Spd. Automatic Transmission 01VDokument870 Seiten5 Spd. Automatic Transmission 01VNP100% (3)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Dehumidification in HVAC System p1Dokument80 SeitenDehumidification in HVAC System p1Ashraf Adel Nashed Zaki89% (9)
- Best2 Creep-Fatigue Crack Initiation Assessment ProceduresDokument12 SeitenBest2 Creep-Fatigue Crack Initiation Assessment ProceduresGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Creep-Fatigue Behavior of Aluminum Alloy-Based Metal MatrixDokument22 SeitenCreep-Fatigue Behavior of Aluminum Alloy-Based Metal MatrixGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Methodology: The Combined Torque and Emission Control Will Be Validated On A 2.3L TurDokument2 SeitenMethodology: The Combined Torque and Emission Control Will Be Validated On A 2.3L TurGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Understanding Stress & StrainDokument36 SeitenUnderstanding Stress & StrainGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Dasar Dasar Terapi Cairan Dan ElektrolitDokument15 SeitenDasar Dasar Terapi Cairan Dan ElektrolitMaulydia PelluNoch keine Bewertungen
- Best, Life Prediction Model For Creep-Fatigue Interaction of P92 Advanced Grade Martensitic SteelDokument51 SeitenBest, Life Prediction Model For Creep-Fatigue Interaction of P92 Advanced Grade Martensitic SteelGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Engineering Models For SofteningDokument13 SeitenEngineering Models For SofteningGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Sample Grant 2Dokument4 SeitenSample Grant 2GooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- 01 Res 37 4 509Dokument12 Seiten01 Res 37 4 509GooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Mechanical TestDokument50 SeitenMechanical TestGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Writing A Research Grant Proposal PDFDokument19 SeitenWriting A Research Grant Proposal PDFsimranNoch keine Bewertungen
- Fatigue Failure Analysis of Crankshafts-A ReviewDokument14 SeitenFatigue Failure Analysis of Crankshafts-A ReviewGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Writing Competitive ProposalsDokument48 SeitenWriting Competitive ProposalsGauravNoch keine Bewertungen
- Materials TestingDokument32 SeitenMaterials TestingArun Babu KNoch keine Bewertungen
- Bench MarkingDokument39 SeitenBench Markingjanagyrama1Noch keine Bewertungen
- Materials TestingDokument32 SeitenMaterials TestingArun Babu KNoch keine Bewertungen
- Mechannica TestsDokument78 SeitenMechannica TestsGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Creep DescriptionDokument11 SeitenCreep DescriptionGerry AnandaNoch keine Bewertungen
- Product Concept Selection 11Dokument14 SeitenProduct Concept Selection 11GooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Materials TestingDokument32 SeitenMaterials TestingArun Babu KNoch keine Bewertungen
- Polymers Deformation PDFDokument68 SeitenPolymers Deformation PDFGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Product Design ProcessDokument14 SeitenProduct Design ProcessGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Machine Design II Clutches DesignDokument14 SeitenMachine Design II Clutches DesignGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Product Design ProcessDokument14 SeitenProduct Design ProcessGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Chapter 3 Input Output Approach To ModelingDokument57 SeitenChapter 3 Input Output Approach To ModelingGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Generalized Approach To ModelingDokument51 SeitenGeneralized Approach To ModelingGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- DMS Chap5 Part3 FTransformDokument54 SeitenDMS Chap5 Part3 FTransformGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- BenchmarkingDokument31 SeitenBenchmarkingHaseeb BokhariNoch keine Bewertungen
- Chap 3 MatDokument108 SeitenChap 3 MatGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- Rotation About A Fixed PointDokument31 SeitenRotation About A Fixed PointGooftilaaAniJiraachuunkooYesusiinNoch keine Bewertungen
- SCH 201 - Chemical ThermodynamicsDokument3 SeitenSCH 201 - Chemical Thermodynamicsjipson olooNoch keine Bewertungen
- Demag DF 125 enDokument234 SeitenDemag DF 125 enBaciu Nicolae50% (2)
- Martillo Hyd Atlas Copco SB 150Dokument12 SeitenMartillo Hyd Atlas Copco SB 150Nain murilloNoch keine Bewertungen
- Service Manual H2SM 912H03R2 SM071225Dokument50 SeitenService Manual H2SM 912H03R2 SM071225Courtney PettyNoch keine Bewertungen
- Ignition SystemDokument51 SeitenIgnition SystemEyob TeklemariamNoch keine Bewertungen
- Mapex AN0320SN PDFDokument1 SeiteMapex AN0320SN PDFDiegoTierradentroNoch keine Bewertungen
- 1 Engine Overview MR479QDokument25 Seiten1 Engine Overview MR479QAdi WidiantoNoch keine Bewertungen
- Refrigerator: Service ManualDokument19 SeitenRefrigerator: Service ManualCesar Calderon GrNoch keine Bewertungen
- Roller Conveyor CatalogueDokument50 SeitenRoller Conveyor CatalogueAbudo Paixao100% (2)
- FPB 22.04 - Steam Turbines Maintenance Guidelines For Non Return Valve of Extraction LinesDokument9 SeitenFPB 22.04 - Steam Turbines Maintenance Guidelines For Non Return Valve of Extraction Lineswaqar ahmadNoch keine Bewertungen
- PW130 7Dokument24 SeitenPW130 7Csongor Molnár100% (1)
- 001-008 Camshaft: InstallDokument6 Seiten001-008 Camshaft: InstallNaing Min HtunNoch keine Bewertungen
- Questionnaires 1Dokument5 SeitenQuestionnaires 1Neo GarceraNoch keine Bewertungen
- 26 Type Brake EquipmentsDokument8 Seiten26 Type Brake EquipmentsRafael SchelbauerNoch keine Bewertungen
- Comparision of Fabrication TolerancesDokument4 SeitenComparision of Fabrication TolerancesSatish Keskar100% (1)
- PTSC MC-Piping Design Training-Basic Piping-LATESTDokument31 SeitenPTSC MC-Piping Design Training-Basic Piping-LATESTNguyen Anh Tung50% (2)
- Selectrode: Non-Machinable Cast IronDokument2 SeitenSelectrode: Non-Machinable Cast IronAlvaro Fernando Reyes CastañedaNoch keine Bewertungen
- 603Dokument7 Seiten603jessa marie sayconNoch keine Bewertungen
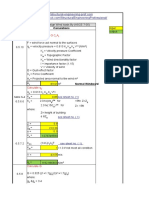
- Wind Loads Calculations by ASCE7 05 For Any BuildingDokument12 SeitenWind Loads Calculations by ASCE7 05 For Any BuildingshubhamdereNoch keine Bewertungen
- Design Example 4 Reinforced Concrete Parking Garage: 2012 IBC SEAOC Structural/Seismic Design Manual, Vol. 3Dokument21 SeitenDesign Example 4 Reinforced Concrete Parking Garage: 2012 IBC SEAOC Structural/Seismic Design Manual, Vol. 3Mofasa ENoch keine Bewertungen
- Water Desorption and Mechanical Hair Properties ImpactDokument13 SeitenWater Desorption and Mechanical Hair Properties Impactvaibhav.kaushik4971Noch keine Bewertungen
- FD 1200 W, 1600 W SN 750040 OnwardsDokument20 SeitenFD 1200 W, 1600 W SN 750040 OnwardsDangolNoch keine Bewertungen
- NDT Ultrasonic Phased Array Examination (NDT Examen de Ultrasonido Arreglo de Fases)Dokument2 SeitenNDT Ultrasonic Phased Array Examination (NDT Examen de Ultrasonido Arreglo de Fases)reyserNoch keine Bewertungen
- Scheda Tecnica: IT-T1S Itb-T1SDokument1 SeiteScheda Tecnica: IT-T1S Itb-T1SITALFIL S.p.A.Noch keine Bewertungen
- Dimensions of Spades and Ring Spacers ASME B16.48Dokument11 SeitenDimensions of Spades and Ring Spacers ASME B16.48Angs TazNoch keine Bewertungen
- SCHEME - G Third Semester 2223434Dokument39 SeitenSCHEME - G Third Semester 2223434AnjithNoch keine Bewertungen
- Thw500 Tds (TT - 0416) EnglishDokument2 SeitenThw500 Tds (TT - 0416) EnglishMasood KhanNoch keine Bewertungen
- PHYSICS (CE & ME) (PH-21102) Introduction To Mechanics: Module 1: (8 Lectures)Dokument1 SeitePHYSICS (CE & ME) (PH-21102) Introduction To Mechanics: Module 1: (8 Lectures)Supratim RoyNoch keine Bewertungen