Das könnte Ihnen auch gefallen
- Repeated Eigenvalues 2Dokument17 SeitenRepeated Eigenvalues 2Serdar BilgeNoch keine Bewertungen
- Repeated Eigenvalues 3Dokument23 SeitenRepeated Eigenvalues 3Serdar BilgeNoch keine Bewertungen
- Repeated EigenvaluesDokument16 SeitenRepeated EigenvaluesSerdar BilgeNoch keine Bewertungen
- Trig Cheat SheetDokument4 SeitenTrig Cheat Sheetapi-284574585Noch keine Bewertungen
- 1 Orthogonality of Cosine, Sine and Complex ExponentialsDokument5 Seiten1 Orthogonality of Cosine, Sine and Complex ExponentialsSerdar BilgeNoch keine Bewertungen
- Lecture 12: Solutions For Equations With Constants Coefficients (Ii)Dokument5 SeitenLecture 12: Solutions For Equations With Constants Coefficients (Ii)Serdar BilgeNoch keine Bewertungen
- MT 1 SolDokument4 SeitenMT 1 SolSerdar BilgeNoch keine Bewertungen
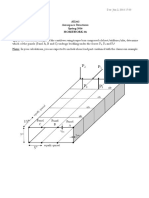
- HW06 Aerospace StructureDokument1 SeiteHW06 Aerospace StructureSerdar BilgeNoch keine Bewertungen
- Ae362 - 2006 - hw1 Aerospace StructureDokument1 SeiteAe362 - 2006 - hw1 Aerospace StructureSerdar BilgeNoch keine Bewertungen
- Estimation of Wing Loading and Thrust Loading (Lectures 9 To 18)Dokument15 SeitenEstimation of Wing Loading and Thrust Loading (Lectures 9 To 18)Serdar BilgeNoch keine Bewertungen
- Hw4 - 2016 Flight MechanicsDokument2 SeitenHw4 - 2016 Flight MechanicsSerdar BilgeNoch keine Bewertungen
- HW03 Aerospace StructureDokument2 SeitenHW03 Aerospace StructureSerdar BilgeNoch keine Bewertungen
- Flight Testing Methodology andDokument6 SeitenFlight Testing Methodology andSerdar BilgeNoch keine Bewertungen
- Midterm 2015Dokument4 SeitenMidterm 2015Serdar BilgeNoch keine Bewertungen
- Hw3 - 2016 Flight MechanicsDokument2 SeitenHw3 - 2016 Flight MechanicsSerdar BilgeNoch keine Bewertungen
- Hw2 - 2016 Flight MechanicsDokument2 SeitenHw2 - 2016 Flight MechanicsSerdar BilgeNoch keine Bewertungen
- HW1 - 2016 Flight MechanicsDokument2 SeitenHW1 - 2016 Flight MechanicsSerdar BilgeNoch keine Bewertungen
- Final Fortran Questions 1Dokument5 SeitenFinal Fortran Questions 1Serdar BilgeNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- 27 Points of Difference Between Personnel Management & HRDDokument2 Seiten27 Points of Difference Between Personnel Management & HRDMurtaza Ejaz33% (3)
- 1.3.3 1.3.4 1.3.5 Input, Output & Storage Devices Workbook by Inqilab Patel PDFDokument173 Seiten1.3.3 1.3.4 1.3.5 Input, Output & Storage Devices Workbook by Inqilab Patel PDFRayyan MalikNoch keine Bewertungen
- CNNPX310R-6P: General SpecificationsDokument5 SeitenCNNPX310R-6P: General SpecificationsZoheir KacimiNoch keine Bewertungen
- Philippine Rural Development Project: South Luzon Cluster C Ommunication Resourc ES Management WorkshopDokument45 SeitenPhilippine Rural Development Project: South Luzon Cluster C Ommunication Resourc ES Management WorkshopAlorn CatibogNoch keine Bewertungen
- Pin Joint en PDFDokument1 SeitePin Joint en PDFCicNoch keine Bewertungen
- AAPG 2012 ICE Technical Program & Registration AnnouncementDokument64 SeitenAAPG 2012 ICE Technical Program & Registration AnnouncementAAPG_EventsNoch keine Bewertungen
- TMA GuideDokument3 SeitenTMA GuideHamshavathini YohoratnamNoch keine Bewertungen
- GSM BSC6000 Performance StatisticsDokument72 SeitenGSM BSC6000 Performance StatisticsAli AlshwalNoch keine Bewertungen
- KV4BBSR Notice ContractuaL Interview 2023-24Dokument9 SeitenKV4BBSR Notice ContractuaL Interview 2023-24SuchitaNoch keine Bewertungen
- Dark Energy Survey DES CollaborationDokument38 SeitenDark Energy Survey DES CollaborationgeorgcantorNoch keine Bewertungen
- PERSONAL DEVELOPMENT (What Is Personal Development?)Dokument37 SeitenPERSONAL DEVELOPMENT (What Is Personal Development?)Ronafe Roncal GibaNoch keine Bewertungen
- Ems Speed Sensor Com MotorDokument24 SeitenEms Speed Sensor Com MotorKarina RickenNoch keine Bewertungen
- Teks Pengacaraan Majlis Perpisahan PerpindahandocDokument8 SeitenTeks Pengacaraan Majlis Perpisahan PerpindahandocTom O Hard JoNoch keine Bewertungen
- DocsDokument4 SeitenDocsSwastika SharmaNoch keine Bewertungen
- FDP VLSI Design at Deep Submicron Node PDFDokument2 SeitenFDP VLSI Design at Deep Submicron Node PDFpraneethshubNoch keine Bewertungen
- DLL - English 5 - Q3 - W8Dokument8 SeitenDLL - English 5 - Q3 - W8Merlyn S. Al-osNoch keine Bewertungen
- The Algorithm Development and Implementation For 3D Printers Based On Adaptive PID ControllerDokument8 SeitenThe Algorithm Development and Implementation For 3D Printers Based On Adaptive PID ControllerShahrzad GhasemiNoch keine Bewertungen
- Dashrath Nandan JAVA (Unit2) NotesDokument18 SeitenDashrath Nandan JAVA (Unit2) NotesAbhinandan Singh RanaNoch keine Bewertungen
- Contract 1 ProjectDokument21 SeitenContract 1 ProjectAditi BanerjeeNoch keine Bewertungen
- Acdc - DC Motor - Lecture Notes 5Dokument30 SeitenAcdc - DC Motor - Lecture Notes 5Cllyan ReyesNoch keine Bewertungen
- Cryptography Lab DA-1Dokument19 SeitenCryptography Lab DA-1Gautam Thothathri 19MIC0092Noch keine Bewertungen
- Module 0-Course Orientation: Objectives OutlineDokument2 SeitenModule 0-Course Orientation: Objectives OutlineEmmanuel CausonNoch keine Bewertungen
- EUCLIDDokument3 SeitenEUCLIDNandini MouryaNoch keine Bewertungen
- Résumé Emily Martin FullDokument3 SeitenRésumé Emily Martin FullEmily MartinNoch keine Bewertungen
- Car Section 2 Series (H) Part-IiDokument6 SeitenCar Section 2 Series (H) Part-Iipandurang nalawadeNoch keine Bewertungen
- Registration Form - Synergies in Communication - 6th Edition - 2017-Drobot AnaDokument3 SeitenRegistration Form - Synergies in Communication - 6th Edition - 2017-Drobot AnaAna IrinaNoch keine Bewertungen
- Conference Paper 2Dokument5 SeitenConference Paper 2Sri JayanthNoch keine Bewertungen
- Mass and Heat Balance of Steelmaking in Bof As Compared To Eaf ProcessesDokument15 SeitenMass and Heat Balance of Steelmaking in Bof As Compared To Eaf ProcessesAgil Setyawan100% (1)
- Modicon PLC CPUS Technical Details.Dokument218 SeitenModicon PLC CPUS Technical Details.TrbvmNoch keine Bewertungen
- SQL TestDokument10 SeitenSQL TestGautam KatlaNoch keine Bewertungen