Das könnte Ihnen auch gefallen
- An Introduction To Differential Geometry PDFDokument299 SeitenAn Introduction To Differential Geometry PDFleovimar100% (1)
- The Ordinary Topology of Jacques LacanDokument83 SeitenThe Ordinary Topology of Jacques LacanChris Johnson100% (1)
- Module 3 of Calculus 2Dokument6 SeitenModule 3 of Calculus 2Jimbo J. AntipoloNoch keine Bewertungen
- What Is Knot Theory? Why Is It in Mathematics?: 1.1 Knots, Links, and Spatial GraphsDokument16 SeitenWhat Is Knot Theory? Why Is It in Mathematics?: 1.1 Knots, Links, and Spatial GraphsAnselmo HansNoch keine Bewertungen
- G11 - BasicCal - Q3 MELC1 Illustrates The Limit of A Function Using A Table of Values and The Graph of FunctionsDokument11 SeitenG11 - BasicCal - Q3 MELC1 Illustrates The Limit of A Function Using A Table of Values and The Graph of Functionsaljun bade100% (1)
- Evans L.,Thompson R. Introduction To Algebraic Topology PDFDokument248 SeitenEvans L.,Thompson R. Introduction To Algebraic Topology PDFmonteNoch keine Bewertungen
- An Illustrated Introduction To The Ricci FlowDokument43 SeitenAn Illustrated Introduction To The Ricci FlowRenatoSoviéticoNoch keine Bewertungen
- The Scientist and Engineer's Guide To Digital Signal Processing.Dokument23 SeitenThe Scientist and Engineer's Guide To Digital Signal Processing.Preethi MarudhuNoch keine Bewertungen
- Fractal AntennaDokument18 SeitenFractal AntennaAnonymous C6Vaod9Noch keine Bewertungen
- Quantum Field Theory by Peskin - Chap03 SolutionDokument15 SeitenQuantum Field Theory by Peskin - Chap03 Solutionphoool100% (1)
- Geometry and TopologyDokument14 SeitenGeometry and TopologySai Swetha KVNoch keine Bewertungen
- GMQ1M2 Week 1Dokument12 SeitenGMQ1M2 Week 1Lerwin Garinga100% (1)
- Structure of Three-ManifoldsDokument81 SeitenStructure of Three-ManifoldsElleNoch keine Bewertungen
- Cosmic Topology IIDokument9 SeitenCosmic Topology IIRobert BednarNoch keine Bewertungen
- The Mathematics of Three-Dimensional Manifolds: by William Thurston and Jeffrey WeeksDokument14 SeitenThe Mathematics of Three-Dimensional Manifolds: by William Thurston and Jeffrey WeeksjohnNoch keine Bewertungen
- Conical Singularities and TorsionDokument11 SeitenConical Singularities and TorsionNicolas FernandezNoch keine Bewertungen
- Symplectic Geometry: Bulletin (New Series) of The American Mathematical Society Volume 5, Number 1, July 1981Dokument14 SeitenSymplectic Geometry: Bulletin (New Series) of The American Mathematical Society Volume 5, Number 1, July 1981Ivan IvanovNoch keine Bewertungen
- GR LecturesDokument116 SeitenGR LecturesPaul RyanNoch keine Bewertungen
- Euclid Bams 1183539848Dokument64 SeitenEuclid Bams 1183539848Michael PearsonNoch keine Bewertungen
- Mech 223Dokument8 SeitenMech 223cristina23Noch keine Bewertungen
- Evolution of Geometric StructuresDokument23 SeitenEvolution of Geometric StructuresAlephNullNoch keine Bewertungen
- Some Thoughts On Geometries and On The Nature of The Gravitational FieldDokument25 SeitenSome Thoughts On Geometries and On The Nature of The Gravitational FieldTarcio Fonseca FurtadoNoch keine Bewertungen
- Spaceandtimein4 DDokument12 SeitenSpaceandtimein4 DDARSAN DEVANANDNoch keine Bewertungen
- Differential Geometry Ideas in Financial MathematicsDokument4 SeitenDifferential Geometry Ideas in Financial MathematicsVishal TamraparniNoch keine Bewertungen
- Spacetime+Gravity ADokument25 SeitenSpacetime+Gravity ANeacsu EugenNoch keine Bewertungen
- Geometrization of 3-Manifolds Via The Ricci Flow: Michael T. AndersonDokument10 SeitenGeometrization of 3-Manifolds Via The Ricci Flow: Michael T. AndersonDiego HenriqueNoch keine Bewertungen
- A Novel Approach To Loxodrome (Rhumb Line), Orthodrome (Great Circle) and Geodesic Line in ECDIS and Navigation in GeneralDokument11 SeitenA Novel Approach To Loxodrome (Rhumb Line), Orthodrome (Great Circle) and Geodesic Line in ECDIS and Navigation in GeneralSimona Draghici100% (1)
- Space-Filling CurvesDokument10 SeitenSpace-Filling CurvesAlexBowringNoch keine Bewertungen
- Jesse Johnson - Notes On Heegaard SplittingsDokument128 SeitenJesse Johnson - Notes On Heegaard SplittingsDuncan_VimNoch keine Bewertungen
- Twins Paradox - Geometry ReviewDokument6 SeitenTwins Paradox - Geometry ReviewCristianRiveraNoch keine Bewertungen
- Chapter 3 Orbits and Gravity 69Dokument7 SeitenChapter 3 Orbits and Gravity 69MaximNoch keine Bewertungen
- Topology Poincare ConjectureDokument8 SeitenTopology Poincare ConjectureKemal BerkNoch keine Bewertungen
- Frank Y. Wang - The Image of A WormholeDokument7 SeitenFrank Y. Wang - The Image of A WormholeKunma050Noch keine Bewertungen
- Curvature Extrema and Four-Vertex Theorems ForDokument13 SeitenCurvature Extrema and Four-Vertex Theorems ForAnsui ZakuNoch keine Bewertungen
- DiffGeomI - Notes Marc BurgerDokument71 SeitenDiffGeomI - Notes Marc Burgerjohnson kevinNoch keine Bewertungen
- Review of The Dynamics in The K I R K W O O D GapsDokument30 SeitenReview of The Dynamics in The K I R K W O O D GapsAndreiNoch keine Bewertungen
- Calculus4 3Dokument11 SeitenCalculus4 3Sharlene BodisNoch keine Bewertungen
- Epjh - E2014 50013 6Dokument91 SeitenEpjh - E2014 50013 6RdNoch keine Bewertungen
- Applications of Reimannian Geometry in Physics (General Theory of Relativity)Dokument14 SeitenApplications of Reimannian Geometry in Physics (General Theory of Relativity)Amirhossein HassanabadiNoch keine Bewertungen
- Cosmological Models of The UniverseDokument6 SeitenCosmological Models of The UniverseAryan GadhaveNoch keine Bewertungen
- Rickard M. Jonsson - Visualizing Curved SpacetimeDokument13 SeitenRickard M. Jonsson - Visualizing Curved SpacetimeArsLexiiNoch keine Bewertungen
- Symmetric Markov Processes, Time Change, and Boundary Theory (LMS-35)Von EverandSymmetric Markov Processes, Time Change, and Boundary Theory (LMS-35)Noch keine Bewertungen
- Metric Methods of Finsler Spaces and in the Foundations of Geometry. (AM-8)Von EverandMetric Methods of Finsler Spaces and in the Foundations of Geometry. (AM-8)Noch keine Bewertungen
- Unit 2Dokument10 SeitenUnit 2agre226644Noch keine Bewertungen
- Physics - Non Commutative Geometry For Pedestrians - (JNL Article) Madore (1999) WWDokument29 SeitenPhysics - Non Commutative Geometry For Pedestrians - (JNL Article) Madore (1999) WWJuniorNoch keine Bewertungen
- Sayan Kar and Deshdeep Sahdev - Evolving Lorentzian WormholesDokument10 SeitenSayan Kar and Deshdeep Sahdev - Evolving Lorentzian WormholesRtpomNoch keine Bewertungen
- Poincare's Conjecture - ResolvedDokument14 SeitenPoincare's Conjecture - ResolvedparasharvinayakNoch keine Bewertungen
- Mercury's Perihelion: Chris Pollock March 31, 2003Dokument18 SeitenMercury's Perihelion: Chris Pollock March 31, 2003Azwar SutionoNoch keine Bewertungen
- Chapter8 Topology UnlockedDokument12 SeitenChapter8 Topology UnlockedtfxpNoch keine Bewertungen
- A Curvature Invariant Inspired by Leonhard Euler's InequalityDokument9 SeitenA Curvature Invariant Inspired by Leonhard Euler's Inequalitycloz54Noch keine Bewertungen
- Remarkable Curves (Little Mathematics Library) (A. I. Markushevich)Dokument47 SeitenRemarkable Curves (Little Mathematics Library) (A. I. Markushevich)alexramquiNoch keine Bewertungen
- Paper Cloud StratificationDokument9 SeitenPaper Cloud StratificationRobert-DupontNoch keine Bewertungen
- Lu 20 ThcyDokument29 SeitenLu 20 Thcygladius257Noch keine Bewertungen
- Eat Chapter 1Dokument17 SeitenEat Chapter 1Angel MuñozNoch keine Bewertungen
- Size of The UniverseDokument5 SeitenSize of The UniversearantheoNoch keine Bewertungen
- Jian-Huang She - A Matrix Model For Misner Universe and Closed String TachyonsDokument21 SeitenJian-Huang She - A Matrix Model For Misner Universe and Closed String TachyonsHuntsmithNoch keine Bewertungen
- Foliations and The Topology of 3-ManifoldsDokument98 SeitenFoliations and The Topology of 3-ManifoldsAnonymous IzH7aoyLNoch keine Bewertungen
- Vladimir N. Yershov - Fermions As Topological ObjectsDokument8 SeitenVladimir N. Yershov - Fermions As Topological ObjectsMopadDeluxeNoch keine Bewertungen
- Uniqueness of Complete Spacelike Hypersurfaces of Constant Mean Curvature in Gener Alized RobertsonWalker Spacetimes Gen RelatiDokument14 SeitenUniqueness of Complete Spacelike Hypersurfaces of Constant Mean Curvature in Gener Alized RobertsonWalker Spacetimes Gen RelatiPaulo VicenteNoch keine Bewertungen
- Etienne Ghys-Fluxos GeodesicosDokument55 SeitenEtienne Ghys-Fluxos GeodesicosWily Sarmiento YucraNoch keine Bewertungen
- HSChapter3 PDFDokument38 SeitenHSChapter3 PDFShweta SridharNoch keine Bewertungen
- Chapter2 PDFDokument44 SeitenChapter2 PDFHugo VentimigliaNoch keine Bewertungen
- Qualifying ServiceDokument2 SeitenQualifying ServiceTanmoy Pal ChowdhuryNoch keine Bewertungen
- Declaration Form (Jan 2018)Dokument2 SeitenDeclaration Form (Jan 2018)Tanmoy Pal ChowdhuryNoch keine Bewertungen
- The Spoilt Child PDFDokument277 SeitenThe Spoilt Child PDFTanmoy Pal ChowdhuryNoch keine Bewertungen
- Deficiency LetterDokument1 SeiteDeficiency LetterTanmoy Pal ChowdhuryNoch keine Bewertungen
- Smt. Nilabati Behera Alias Lalit ... Vs State of Orissa and Ors On 24 March, 1993Dokument22 SeitenSmt. Nilabati Behera Alias Lalit ... Vs State of Orissa and Ors On 24 March, 1993Tanmoy Pal ChowdhuryNoch keine Bewertungen
- National Mediclaim PolicyDokument1 SeiteNational Mediclaim PolicyTanmoy Pal ChowdhuryNoch keine Bewertungen
- Societies Registration Act, 1860: Dissolution of A Registered SocietyDokument6 SeitenSocieties Registration Act, 1860: Dissolution of A Registered SocietyTanmoy Pal ChowdhuryNoch keine Bewertungen
- 4088869Dokument1 Seite4088869Tanmoy Pal ChowdhuryNoch keine Bewertungen
- Paramount Health Services & Insurance Tpa Private Limited: First Reminder Letter Without PrejudiceDokument1 SeiteParamount Health Services & Insurance Tpa Private Limited: First Reminder Letter Without PrejudiceTanmoy Pal ChowdhuryNoch keine Bewertungen
- National Mediclaim Policy PDFDokument19 SeitenNational Mediclaim Policy PDFTanmoy Pal ChowdhuryNoch keine Bewertungen
- Paramount Health Services & Insurance Tpa Private Limited: First Reminder Letter Without PrejudiceDokument1 SeiteParamount Health Services & Insurance Tpa Private Limited: First Reminder Letter Without PrejudiceTanmoy Pal ChowdhuryNoch keine Bewertungen
- Goodhealth Group Mediclaim Policy: The New India Assurance Company LimitedDokument24 SeitenGoodhealth Group Mediclaim Policy: The New India Assurance Company LimitedTanmoy Pal ChowdhuryNoch keine Bewertungen
- CTB 9 Jan 18Dokument10 SeitenCTB 9 Jan 18Tanmoy Pal ChowdhuryNoch keine Bewertungen
- Category-Codes For Claiming Age RelaxationDokument2 SeitenCategory-Codes For Claiming Age RelaxationTanmoy Pal ChowdhuryNoch keine Bewertungen
- ECON 871 - Advanced International EconomicsDokument11 SeitenECON 871 - Advanced International EconomicsTanmoy Pal ChowdhuryNoch keine Bewertungen
- Recruitment and Service Rules: Indian Institute of Information Technology, AllahabadDokument58 SeitenRecruitment and Service Rules: Indian Institute of Information Technology, AllahabadTanmoy Pal ChowdhuryNoch keine Bewertungen
- List of Expenses Generally Excluded in Hospitalisation Policy List of Expenses Generally Excluded ("Non-Medical") in Hospital Indemnity PolicyDokument7 SeitenList of Expenses Generally Excluded in Hospitalisation Policy List of Expenses Generally Excluded ("Non-Medical") in Hospital Indemnity PolicyTanmoy Pal ChowdhuryNoch keine Bewertungen
- Journal of Pure and Applied Algebra: Frank QuinnDokument14 SeitenJournal of Pure and Applied Algebra: Frank QuinnTanmoy Pal ChowdhuryNoch keine Bewertungen
- Annexure-2 Concepts and Definitions: Higher EducationDokument9 SeitenAnnexure-2 Concepts and Definitions: Higher EducationTanmoy Pal ChowdhuryNoch keine Bewertungen
- Royal Society Philosophical Transactions: Physical Sciences and EngineeringDokument17 SeitenRoyal Society Philosophical Transactions: Physical Sciences and EngineeringTanmoy Pal ChowdhuryNoch keine Bewertungen
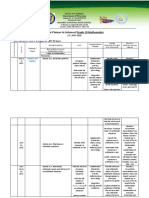
- G10 - Budget of Work - First QuarterDokument11 SeitenG10 - Budget of Work - First QuarterRenel MapindanNoch keine Bewertungen
- 09 Trigonometric Waveforms and Identities Tutorial Questions OnlyDokument2 Seiten09 Trigonometric Waveforms and Identities Tutorial Questions Onlysam dowrickNoch keine Bewertungen
- Nonlinear Systems ScilabDokument12 SeitenNonlinear Systems ScilabCarlos Soza RossNoch keine Bewertungen
- 10th Chapter No 2 and 5Dokument1 Seite10th Chapter No 2 and 5muzammil khaliqNoch keine Bewertungen
- Parallel Lines 1Dokument13 SeitenParallel Lines 1Delia ParamithaNoch keine Bewertungen
- CHP 6.1-Chp 6.7.4Dokument112 SeitenCHP 6.1-Chp 6.7.4tolga_enes9949Noch keine Bewertungen
- MATA29 Assignment 1 - Functions (BLANK)Dokument7 SeitenMATA29 Assignment 1 - Functions (BLANK)annaNoch keine Bewertungen
- Unit 1 Chapter 6 AnswersDokument34 SeitenUnit 1 Chapter 6 AnswersashtigosineNoch keine Bewertungen
- Measures of CT-HDokument24 SeitenMeasures of CT-HDeepakNoch keine Bewertungen
- Inverse of A Matrix To The NTH Power Is The NTH Power of The Inverse of The Matrix: ProofDokument3 SeitenInverse of A Matrix To The NTH Power Is The NTH Power of The Inverse of The Matrix: Proofsankofakanian0% (1)
- Bicol University College of Engineering Civil Engineering DepartmentDokument3 SeitenBicol University College of Engineering Civil Engineering DepartmentMa Ella Mae LogronioNoch keine Bewertungen
- Light and PolarizationDokument3 SeitenLight and PolarizationImran MuhammadNoch keine Bewertungen
- DPP 14 Rank Refiner by Om SirDokument3 SeitenDPP 14 Rank Refiner by Om SirMike PhilipsNoch keine Bewertungen
- Comparative Study of Different Root Location Methods Using MATLAB ProgramDokument7 SeitenComparative Study of Different Root Location Methods Using MATLAB ProgramSebas MatuteNoch keine Bewertungen
- Trig IdentitiesDokument4 SeitenTrig IdentitiesShreya SudarshanNoch keine Bewertungen
- Volterra Integral Equations of The Second KindDokument2 SeitenVolterra Integral Equations of The Second KindSyed_AzmiNoch keine Bewertungen
- Inflection PointsDokument6 SeitenInflection PointsJerome MontoyaNoch keine Bewertungen
- Analysis IDokument64 SeitenAnalysis IPătularu andreiNoch keine Bewertungen
- The Binary Goldbach ProblemDokument18 SeitenThe Binary Goldbach Problemwalter huNoch keine Bewertungen
- Student Solutions Manual: Boundary Value ProblemsDokument10 SeitenStudent Solutions Manual: Boundary Value ProblemsshivanshNoch keine Bewertungen
- Centroids and Centers of GravityDokument49 SeitenCentroids and Centers of GravitySteven Dominic AballeNoch keine Bewertungen
- St. Peter's College Sabayle ST., Poblacion, Iligan City: ObjectiveDokument3 SeitenSt. Peter's College Sabayle ST., Poblacion, Iligan City: ObjectiveDonnald YambaNoch keine Bewertungen
- Lovasz Local Lemma (IMO Probability)Dokument7 SeitenLovasz Local Lemma (IMO Probability)Hongmin JungNoch keine Bewertungen
- Routh Criterion - Tutorial 7 - Co - 12Dokument3 SeitenRouth Criterion - Tutorial 7 - Co - 12Haelu KuNoch keine Bewertungen
- Work TheoryDokument57 SeitenWork TheoryIftekhar AliNoch keine Bewertungen