Das könnte Ihnen auch gefallen
- Fundamentals of Heat Exchanger DesignDokument972 SeitenFundamentals of Heat Exchanger DesignNgô Linh Đan80% (5)
- 003 - Option B Chapter 14 Engineering Physics PDFDokument62 Seiten003 - Option B Chapter 14 Engineering Physics PDFyuke kristinaNoch keine Bewertungen
- Calculation of Pipe Line Heat LossDokument9 SeitenCalculation of Pipe Line Heat LossradanpetricaNoch keine Bewertungen
- Physics Formulas: V V U M MDokument5 SeitenPhysics Formulas: V V U M MEXa Krad NoitatpmetNoch keine Bewertungen
- Concave and Convex LensDokument7 SeitenConcave and Convex LensannmarieNoch keine Bewertungen
- Input Data: Project Usan Deep Water Attachment XXXXXX To Calculation Note Ref. Yyyyyyyyy Rev. ZZDokument5 SeitenInput Data: Project Usan Deep Water Attachment XXXXXX To Calculation Note Ref. Yyyyyyyyy Rev. ZZcatullusNoch keine Bewertungen
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsVon EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNoch keine Bewertungen
- PhysicsDokument18 SeitenPhysicsNelsonNoch keine Bewertungen
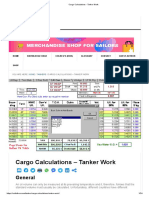
- Cargo Calculations - Tanker WorkDokument24 SeitenCargo Calculations - Tanker WorkVasil Raykov100% (1)
- Perhitungan Baja Girder - SeptiyanDokument37 SeitenPerhitungan Baja Girder - SeptiyanTiyanNoch keine Bewertungen
- Gas Turbine Performance CalculationDokument7 SeitenGas Turbine Performance CalculationAtiqur RahmanNoch keine Bewertungen
- Third Quarter Examination 2017 in Science 6 (New) For DistrictDokument6 SeitenThird Quarter Examination 2017 in Science 6 (New) For DistrictMarlon Yap100% (2)
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresVon EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresBewertung: 4 von 5 Sternen4/5 (1)
- Important Note: Corrosion Under Insulation (CUI) Can Often Be VeryDokument1 SeiteImportant Note: Corrosion Under Insulation (CUI) Can Often Be Veryphoneme79Noch keine Bewertungen
- Formulas and Units PDFDokument9 SeitenFormulas and Units PDFtvmehta01Noch keine Bewertungen
- Vehicle Dynamics: Transmission CalculationsDokument7 SeitenVehicle Dynamics: Transmission Calculationsravikant sarswatNoch keine Bewertungen
- HCI H2 PHY P1 Suggested SolutionDokument4 SeitenHCI H2 PHY P1 Suggested Solutionllilizheng8Noch keine Bewertungen
- Worked Solutions: ExercisesDokument5 SeitenWorked Solutions: ExercisesJeffNoch keine Bewertungen
- Red - Conic CristianDokument42 SeitenRed - Conic CristianToma CostinNoch keine Bewertungen
- Sol Cap 4 PhysSL - WS - Ch04Dokument4 SeitenSol Cap 4 PhysSL - WS - Ch04Rodrigo AparicioNoch keine Bewertungen
- ExercisesDokument5 SeitenExercisesSebastien BerkaNoch keine Bewertungen
- Perhitungan WF PurlinDokument23 SeitenPerhitungan WF Purlinisnaini budi PituturNoch keine Bewertungen
- Fis 24Dokument6 SeitenFis 24syafrina novitaNoch keine Bewertungen
- Homework1 - Introduction To EngineeringDokument8 SeitenHomework1 - Introduction To EngineeringMusab Cabi0% (1)
- Theory of Machine: Watt, Porter and Proell GovernorsDokument18 SeitenTheory of Machine: Watt, Porter and Proell GovernorsAlankrit SrivastavaNoch keine Bewertungen
- ·m = N = r volta = s = s = H = m φ = f = r λ = l = m = = =, 73 × 10 = ·x ·ΔxDokument1 Seite·m = N = r volta = s = s = H = m φ = f = r λ = l = m = = =, 73 × 10 = ·x ·ΔxXavi BielsaNoch keine Bewertungen
- 300 Physics Formulas - To PrintDokument2 Seiten300 Physics Formulas - To PrintJan AlamNoch keine Bewertungen
- STD Formulae Electrical EngrDokument2 SeitenSTD Formulae Electrical EngrVincent OryangNoch keine Bewertungen
- 1130 Formula Sheet F20Dokument3 Seiten1130 Formula Sheet F20yamoon shashNoch keine Bewertungen
- Lesson 2Dokument6 SeitenLesson 2mayah sabarNoch keine Bewertungen
- Isaac Gcse Physics Book Teacher VersionDokument116 SeitenIsaac Gcse Physics Book Teacher VersionhappyproofNoch keine Bewertungen
- Physics Cheat Sheet 1 Units 5 More Motion FormulasDokument1 SeitePhysics Cheat Sheet 1 Units 5 More Motion FormulasMuhammad Pathan AbroNoch keine Bewertungen
- Summary Mona ShalanDokument39 SeitenSummary Mona Shalanromaehab201912Noch keine Bewertungen
- Spur GearDokument1 SeiteSpur GearAngielou SialanaNoch keine Bewertungen
- Steel Structural Analysis2Dokument2 SeitenSteel Structural Analysis2P Aul Mach OnNoch keine Bewertungen
- Formulae and Data Sheet For Final ExamDokument1 SeiteFormulae and Data Sheet For Final ExamKha TranNoch keine Bewertungen
- Física 2Dokument1 SeiteFísica 2Xavi BielsaNoch keine Bewertungen
- 1.introduction To COMDokument5 Seiten1.introduction To COMAswath SNoch keine Bewertungen
- CH3 1Dokument48 SeitenCH3 1Hao Phan AnhNoch keine Bewertungen
- Neet Material Circular MotionDokument27 SeitenNeet Material Circular Motionnghiachi.comNoch keine Bewertungen
- Me6505 Model Exam I QP Set A&bDokument9 SeitenMe6505 Model Exam I QP Set A&bvenkatesh naiduNoch keine Bewertungen
- c2 Pages DeletedDokument3 Seitenc2 Pages DeletedSamarthNoch keine Bewertungen
- Velocity Time Length Time : 4. DimensionsDokument3 SeitenVelocity Time Length Time : 4. DimensionsMuhammad AliNoch keine Bewertungen
- 12 PDFDokument7 Seiten12 PDFTanmoy GhoshNoch keine Bewertungen
- Physics Target SolnDokument301 SeitenPhysics Target SolnAryan KyathamNoch keine Bewertungen
- Lesson 8 ROTATIONAL MOTION AND EQUILIBRIUM 1Dokument13 SeitenLesson 8 ROTATIONAL MOTION AND EQUILIBRIUM 1Dianna GwennNoch keine Bewertungen
- Whirling of Rotating ShaftsDokument11 SeitenWhirling of Rotating ShaftsAldrich paul NiñalgaNoch keine Bewertungen
- Equation Sheet 231 PhysicsDokument2 SeitenEquation Sheet 231 PhysicsAshlie PolancoNoch keine Bewertungen
- Mechanics Formula SheetDokument1 SeiteMechanics Formula Sheetej_00017Noch keine Bewertungen
- SI Units and Dimensions: by Prof M BasannaDokument4 SeitenSI Units and Dimensions: by Prof M Basannaembi76Noch keine Bewertungen
- 105 Eq Sheet 3Dokument2 Seiten105 Eq Sheet 3NadeenMohamedNoch keine Bewertungen
- Herramienta Insert Face Mill 8 Z 4: PlaneadoDokument5 SeitenHerramienta Insert Face Mill 8 Z 4: PlaneadoDennis PuentesNoch keine Bewertungen
- En Engineering Definitions and FormulasDokument1 SeiteEn Engineering Definitions and FormulasplennyNoch keine Bewertungen
- Problem SolvingDokument9 SeitenProblem SolvingAldrich paul NiñalgaNoch keine Bewertungen
- Fórmulas Fresamento MétricaDokument1 SeiteFórmulas Fresamento MétricaJunior GuedesNoch keine Bewertungen
- 9 Makä°ne Elemanlari English PDFDokument40 Seiten9 Makä°ne Elemanlari English PDFozmenNoch keine Bewertungen
- Unit One Formulae and Definitions Module 1: Mechanics D: Base Quantity Base Unit ImensionsDokument27 SeitenUnit One Formulae and Definitions Module 1: Mechanics D: Base Quantity Base Unit ImensionsUnexpected TheoryNoch keine Bewertungen
- Calculation of Research PaperDokument2 SeitenCalculation of Research PaperMahesh ChavanNoch keine Bewertungen
- A DV DT D DTDokument5 SeitenA DV DT D DTHOANJO1983Noch keine Bewertungen
- Spring 2001 Physics 2048 Test 3 Solutions: Problem 1. (Short Answer: 15 Points)Dokument5 SeitenSpring 2001 Physics 2048 Test 3 Solutions: Problem 1. (Short Answer: 15 Points)yanzcomey comeyNoch keine Bewertungen
- Kinetics of A Particle: Force and Acceleration (II) : by Dr. Toh Hoong ThiamDokument19 SeitenKinetics of A Particle: Force and Acceleration (II) : by Dr. Toh Hoong Thiamnadia syahiraNoch keine Bewertungen
- Conversii MasuratoriDokument1 SeiteConversii MasuratoriCatalin BeuNoch keine Bewertungen
- Dynamics Equation of Motion - Curvilinear Motion ProblemsDokument21 SeitenDynamics Equation of Motion - Curvilinear Motion ProblemsDiana VegaNoch keine Bewertungen
- Computation of Results: Sample Calculation For N1 Row 1 For N1 - 2000 RPMDokument2 SeitenComputation of Results: Sample Calculation For N1 Row 1 For N1 - 2000 RPMrayni46Noch keine Bewertungen
- CH 6Dokument157 SeitenCH 6qusayNoch keine Bewertungen
- Midterm Review PDFDokument16 SeitenMidterm Review PDFMt RushNoch keine Bewertungen
- CH 10Dokument29 SeitenCH 10Ardian20Noch keine Bewertungen
- Physics FormulasDokument5 SeitenPhysics FormulasMethyl OrangeNoch keine Bewertungen
- List of Data, Formulae and RelationshipsDokument5 SeitenList of Data, Formulae and RelationshipsRicky ChanNoch keine Bewertungen
- Schedule Management PlanDokument1 SeiteSchedule Management Planphoneme79Noch keine Bewertungen
- Work Breakdown StructureDokument1 SeiteWork Breakdown Structurephoneme79Noch keine Bewertungen
- Cage Defect Frequency: Modulation, Frequency Modulation, and ModulationDokument1 SeiteCage Defect Frequency: Modulation, Frequency Modulation, and Modulationphoneme79Noch keine Bewertungen
- Requirements Management PanDokument1 SeiteRequirements Management Panphoneme79Noch keine Bewertungen
- 1.2 Stakeholder Register: 8 Initiating FormsDokument1 Seite1.2 Stakeholder Register: 8 Initiating Formsphoneme79Noch keine Bewertungen
- Schedule Management PlanDokument1 SeiteSchedule Management Planphoneme79Noch keine Bewertungen
- Network DiagramDokument1 SeiteNetwork Diagramphoneme79Noch keine Bewertungen
- Measurement.: 2003 Commtest Instruments Beginner'S Guide To Machine VibrationDokument1 SeiteMeasurement.: 2003 Commtest Instruments Beginner'S Guide To Machine Vibrationphoneme79Noch keine Bewertungen
- How Is Data Collected?: Itself. To Do This, Measurements Are Usually Recorded On TheDokument1 SeiteHow Is Data Collected?: Itself. To Do This, Measurements Are Usually Recorded On Thephoneme79Noch keine Bewertungen
- Number of AveragesDokument1 SeiteNumber of Averagesphoneme79Noch keine Bewertungen
- Beating DefinitionDokument1 SeiteBeating Definitionphoneme79Noch keine Bewertungen
- Data Display SpectrumDokument1 SeiteData Display Spectrumphoneme79Noch keine Bewertungen
- Backlash DefinitonDokument1 SeiteBacklash Definitonphoneme79Noch keine Bewertungen
- Max Ferequrency Seleti9onDokument1 SeiteMax Ferequrency Seleti9onphoneme79Noch keine Bewertungen
- Design of Water Pipe FlowsDokument1 SeiteDesign of Water Pipe Flowsphoneme79Noch keine Bewertungen
- Spectram LinesDokument1 SeiteSpectram Linesphoneme79Noch keine Bewertungen
- Seal ApplicationsDokument1 SeiteSeal Applicationsphoneme79Noch keine Bewertungen
- Predict CorrosionDokument1 SeitePredict Corrosionphoneme79Noch keine Bewertungen
- Sintakote JointDokument1 SeiteSintakote Jointphoneme79Noch keine Bewertungen
- Machinery Health Sensors: White PaperDokument1 SeiteMachinery Health Sensors: White Paperphoneme79Noch keine Bewertungen
- Design of Water Pipe Flows PDFDokument1 SeiteDesign of Water Pipe Flows PDFphoneme79Noch keine Bewertungen
- Water Hammer CalcsDokument1 SeiteWater Hammer Calcsphoneme79Noch keine Bewertungen
- Hydraulic Charts For WaterDokument1 SeiteHydraulic Charts For Waterphoneme79Noch keine Bewertungen
- SC: Stepper Rich Limit:: FORM 6354-1Dokument1 SeiteSC: Stepper Rich Limit:: FORM 6354-1phoneme79Noch keine Bewertungen
- General Information: Serial Numbers and Engine NameplateDokument1 SeiteGeneral Information: Serial Numbers and Engine Nameplatephoneme79100% (1)
- Carbon Steel Pipe Standards 1Dokument1 SeiteCarbon Steel Pipe Standards 1phoneme79Noch keine Bewertungen
- Straub Flex CouplingDokument1 SeiteStraub Flex Couplingphoneme79Noch keine Bewertungen
- Esp SoftwareDokument1 SeiteEsp Softwarephoneme79Noch keine Bewertungen
- Lean Maintenance PhasesDokument1 SeiteLean Maintenance Phasesphoneme79Noch keine Bewertungen
- Final Project Finite Element AnalysisDokument41 SeitenFinal Project Finite Element AnalysisAkhil KapoorNoch keine Bewertungen
- S1-3 MicrosensorsDokument15 SeitenS1-3 Microsensorssrinathgudur11100% (1)
- Hygromax: VersionsDokument10 SeitenHygromax: VersionsmendoncasegundoNoch keine Bewertungen
- Introductory Statistical MechanicsDokument4 SeitenIntroductory Statistical MechanicsParthaNoch keine Bewertungen
- QueDokument29 SeitenQuedeva1007Noch keine Bewertungen
- Ce1013 09Dokument42 SeitenCe1013 09Durga SharmaNoch keine Bewertungen
- Written Work3Dokument2 SeitenWritten Work3John Robert Dayrit VenturaNoch keine Bewertungen
- X. Rotational Equilibrium and Rotational DynamicsDokument17 SeitenX. Rotational Equilibrium and Rotational DynamicsPatrick SibandaNoch keine Bewertungen
- SSC Je Civil Engineering: Set - 7 Daily 9:00PMDokument43 SeitenSSC Je Civil Engineering: Set - 7 Daily 9:00PMNishikanta Mondal100% (1)
- 9702 Nos Ps 5 PDFDokument4 Seiten9702 Nos Ps 5 PDFDe NimNoch keine Bewertungen
- Normativ Panouri SandwichDokument58 SeitenNormativ Panouri SandwichAlex ChiraNoch keine Bewertungen
- Centrifugal or Centripetal ForceDokument3 SeitenCentrifugal or Centripetal ForceGianne Karl AlmarinesNoch keine Bewertungen
- MSUB (Microstrip Substrate) - ADS 2009 - Keysight Knowledge CenterDokument3 SeitenMSUB (Microstrip Substrate) - ADS 2009 - Keysight Knowledge CenterLại Lê HuyNoch keine Bewertungen
- EXP - 4 Chip MorphologyDokument2 SeitenEXP - 4 Chip MorphologyRaju SaiNoch keine Bewertungen
- Chapter 3 Spatial Descriptions and Transformations PDFDokument33 SeitenChapter 3 Spatial Descriptions and Transformations PDFOmar AL JabaiNoch keine Bewertungen
- JKCET Medical 2015 Answer Key Phy CheDokument12 SeitenJKCET Medical 2015 Answer Key Phy CheRuchi SharmaNoch keine Bewertungen
- Differential Transformation MethodDokument11 SeitenDifferential Transformation MethodSergio UrquietaNoch keine Bewertungen
- Chapter 2 Mat455Dokument36 SeitenChapter 2 Mat455Ajaq 98Noch keine Bewertungen
- 6 Orthogonal and Oblique CuttingDokument12 Seiten6 Orthogonal and Oblique CuttingPRASAD326100% (6)
- AP Chemistry Bonding Help Sheet: 2, (Diamond)Dokument6 SeitenAP Chemistry Bonding Help Sheet: 2, (Diamond)Weiyu TongNoch keine Bewertungen