Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Breaking of Positive and Negative Solitary WavesDokument10 SeitenBreaking of Positive and Negative Solitary WavesKayhanNoch keine Bewertungen
- PDFDokument59 SeitenPDFKayhanNoch keine Bewertungen
- 2017 03 29 Tutorial ShipresistanceDokument24 Seiten2017 03 29 Tutorial ShipresistanceKayhanNoch keine Bewertungen
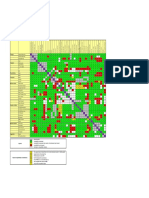
- CompatibilityMatrix Turbo 90 3Dokument1 SeiteCompatibilityMatrix Turbo 90 3KayhanNoch keine Bewertungen
- LicenseDokument1 SeiteLicenseKayhanNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- GR 12 Physics Collisions Lesson (Elastic and Inelastic)Dokument13 SeitenGR 12 Physics Collisions Lesson (Elastic and Inelastic)AN - 12BM 795510 Harold M Brathwaite SSNoch keine Bewertungen
- Vibration Analysis of Cracked BeamDokument80 SeitenVibration Analysis of Cracked Beamyq zhangNoch keine Bewertungen
- Shaftcad 2002 ModuleDokument40 SeitenShaftcad 2002 ModuleEngr Eze Chuklet ChukwumaNoch keine Bewertungen
- Trapezoidal Sheet As A Bracing Preventing Flat Trusses From Out-Of-Plane BucklingDokument7 SeitenTrapezoidal Sheet As A Bracing Preventing Flat Trusses From Out-Of-Plane BucklingWilliam Pol100% (1)
- 4 BR Cat VF-W Ie2-Ie3 Eng r03 0Dokument286 Seiten4 BR Cat VF-W Ie2-Ie3 Eng r03 0emersonNoch keine Bewertungen
- Particle in A One Dimensional BoxDokument19 SeitenParticle in A One Dimensional BoxAgnivesh SharmaNoch keine Bewertungen
- Bioproduct Exp4 g1Dokument20 SeitenBioproduct Exp4 g1JivashiniBalasupurManiamNoch keine Bewertungen
- SST Turbulence ModelDokument8 SeitenSST Turbulence Modelmatteo_1234Noch keine Bewertungen
- Process Line Sizing Task and Solution PDFDokument4 SeitenProcess Line Sizing Task and Solution PDFKamalNoch keine Bewertungen
- FendersDokument3 SeitenFendersRv SinghNoch keine Bewertungen
- Force Vectors, Vector Operations & Addition Coplanar Forces: In-Class Activities: Today's ObjectiveDokument24 SeitenForce Vectors, Vector Operations & Addition Coplanar Forces: In-Class Activities: Today's ObjectiveAtef NazNoch keine Bewertungen
- Other ProspectusDokument102 SeitenOther ProspectusDudley SrinivasNoch keine Bewertungen
- Honors Test C-17 #4351678Dokument3 SeitenHonors Test C-17 #4351678Olivia CaffreyNoch keine Bewertungen
- Kinematics Equations 1-DDokument16 SeitenKinematics Equations 1-DKella OrtegaNoch keine Bewertungen
- Module-1Dokument75 SeitenModule-1pakistani challangeNoch keine Bewertungen
- 1 - Microwave Engineering CourseDokument63 Seiten1 - Microwave Engineering CoursedaekmmmmNoch keine Bewertungen
- Transport Through Quantum Dots: Lecture Notes DPG-School Electronic Nanostructures' Oct 8-12, 2001, Bad Honnef (Germany)Dokument34 SeitenTransport Through Quantum Dots: Lecture Notes DPG-School Electronic Nanostructures' Oct 8-12, 2001, Bad Honnef (Germany)Azhar MahmoodNoch keine Bewertungen
- Quantum WorksheetDokument5 SeitenQuantum WorksheetlmlNoch keine Bewertungen
- BNBC LECTURE 13FEB 2022 Geotech 02 FINALDokument40 SeitenBNBC LECTURE 13FEB 2022 Geotech 02 FINALEngr. Gazi Golam SarwarNoch keine Bewertungen
- Elements of Heat Transfer - M. Jacob and G. A. HawkinsDokument80 SeitenElements of Heat Transfer - M. Jacob and G. A. HawkinsPhilip Darwin Arcenal0% (1)
- Effects of Fines Contents On Engineering Properties of Sand-FinesDokument8 SeitenEffects of Fines Contents On Engineering Properties of Sand-FinesNguyen Bao ChauNoch keine Bewertungen
- Strength of Materials Lecture NotesDokument37 SeitenStrength of Materials Lecture NotesAmit SinghNoch keine Bewertungen
- Introduction To Computational ChemistryDokument17 SeitenIntroduction To Computational ChemistrySean MacfoyNoch keine Bewertungen
- The ElectronDokument20 SeitenThe ElectronJohn Byde100% (1)
- 7.solid State Physics - GATE 2010 - 2013Dokument12 Seiten7.solid State Physics - GATE 2010 - 2013Abhishek UpadhyayNoch keine Bewertungen
- 132kV CB Foundation Design CalculationDokument8 Seiten132kV CB Foundation Design CalculationAbdullah Al MamunNoch keine Bewertungen
- Modeling of The Building - FinalDokument5 SeitenModeling of The Building - FinalChaudhary Fazeel AhmadNoch keine Bewertungen
- ObjectiveDokument2 SeitenObjectivedrjbjp0% (1)
- Agitation and Mixing of Liquids: Unit IVDokument54 SeitenAgitation and Mixing of Liquids: Unit IVmehtab hussain100% (3)