Das könnte Ihnen auch gefallen
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Von EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Bewertung: 2 von 5 Sternen2/5 (1)
- Control PID de Un Helicoptero, DiseñoDokument5 SeitenControl PID de Un Helicoptero, DiseñoAngelNoch keine Bewertungen
- Examen Final CAPDokument22 SeitenExamen Final CAPRAUL . ARAYA GUTIERREZNoch keine Bewertungen
- Modelado y Control de Un Helicóptero QuadrotorDokument141 SeitenModelado y Control de Un Helicóptero QuadrotorRaz MigueloNoch keine Bewertungen
- Tecnología Del ControlDokument74 SeitenTecnología Del ControlCarlos Espinoza90% (10)
- Curvas y Superficies de NivelDokument4 SeitenCurvas y Superficies de Nivelcarlos porrasNoch keine Bewertungen
- Ladrillera PukaraDokument31 SeitenLadrillera PukaraAnonymous s7UpSr6sS100% (1)
- PFC+Modelo+y+Control+LQR+de+Una+Aeronave+de+Cuatro+RotoresDokument166 SeitenPFC+Modelo+y+Control+LQR+de+Una+Aeronave+de+Cuatro+RotoresInkieto BtkNoch keine Bewertungen
- Modelado y Control de Un Propulsor para Robot Submarino Tele-Operado (ROV)Dokument6 SeitenModelado y Control de Un Propulsor para Robot Submarino Tele-Operado (ROV)Cristhian CasarrubiasNoch keine Bewertungen
- Anteproyecto de ControlDokument6 SeitenAnteproyecto de ControlEmanuel Arcos CoronelNoch keine Bewertungen
- 10-Texto Del Artículo-34-1-10-20140828Dokument17 Seiten10-Texto Del Artículo-34-1-10-20140828fabian pachecoNoch keine Bewertungen
- 190 581 1 PB PDFDokument11 Seiten190 581 1 PB PDFAngela SeyerNoch keine Bewertungen
- Ejemplo Control HelicopteroDokument13 SeitenEjemplo Control HelicopteroFerney DeviaNoch keine Bewertungen
- Analisis de Un Robot Manipulador Scara ARTICULODokument22 SeitenAnalisis de Un Robot Manipulador Scara ARTICULOcarlos.otiniano9811Noch keine Bewertungen
- Comparacion Experimental de Controladores PID Clasico - PID No Lineal y PID DifusoDokument15 SeitenComparacion Experimental de Controladores PID Clasico - PID No Lineal y PID DifusoOscar M IbarraNoch keine Bewertungen
- Cuestionario 3Dokument2 SeitenCuestionario 3Anthony AguilaNoch keine Bewertungen
- Modelado y Control de Un Cuadricoptero - SEVILLA14 PDFDokument12 SeitenModelado y Control de Un Cuadricoptero - SEVILLA14 PDFAaron Smirnov Garciia Ü .i.Noch keine Bewertungen
- Mandos HelicopteroDokument138 SeitenMandos HelicopteroHector Siza0% (1)
- Control Pid DigitalDokument4 SeitenControl Pid Digitalfranklin romeroNoch keine Bewertungen
- Proyecto Etn-640Dokument22 SeitenProyecto Etn-640MILTON CABRERANoch keine Bewertungen
- Montaje y Mantenimiento Del Sistema de Control y Regulación en El AerogeneradorDokument68 SeitenMontaje y Mantenimiento Del Sistema de Control y Regulación en El Aerogeneradoreduon20Noch keine Bewertungen
- Laboratorio IDokument12 SeitenLaboratorio IRonald Alejandro Chaupin BautistaNoch keine Bewertungen
- Control Fuzzy de HelicopteroDokument6 SeitenControl Fuzzy de Helicopteromars1972Noch keine Bewertungen
- Diseño Y Construcción de Un Prototipo de Control: Rodrigo Xavier Cabrera CalupinaDokument201 SeitenDiseño Y Construcción de Un Prototipo de Control: Rodrigo Xavier Cabrera Calupinajmolina500Noch keine Bewertungen
- Xc650cx SPDokument68 SeitenXc650cx SPjaime eduardo henao carmonaNoch keine Bewertungen
- HelicopterocontrolDokument49 SeitenHelicopterocontrolYuarth HernándezNoch keine Bewertungen
- xc650cx Es Es 3723684 PDFDokument68 Seitenxc650cx Es Es 3723684 PDFROBERTO CARLOS NAVARRO CONRADONoch keine Bewertungen
- Articulo Control de Un Balancin Con Motor y HeliceDokument3 SeitenArticulo Control de Un Balancin Con Motor y HeliceUlises Flores RefugioNoch keine Bewertungen
- Lsca P11 2019BDokument3 SeitenLsca P11 2019BDennys VillavicencioNoch keine Bewertungen
- Capitulo 1Dokument8 SeitenCapitulo 1ingcivil01Noch keine Bewertungen
- Modelación, Simulación y Control de Un Levitador NeumáticoDokument9 SeitenModelación, Simulación y Control de Un Levitador NeumáticoAdalberto LazariniNoch keine Bewertungen
- Laboratorio 2 MicroprocesadoresDokument5 SeitenLaboratorio 2 MicroprocesadoresJUAN SEBASTIAN DELGADO MATABANCHOYNoch keine Bewertungen
- Control de Altitud de Un Motor Brushless Mediante El Uso de Un Sensor HCDokument15 SeitenControl de Altitud de Un Motor Brushless Mediante El Uso de Un Sensor HCNabilExgenNoch keine Bewertungen
- 6429 8850 1 PBDokument12 Seiten6429 8850 1 PBdanari25Noch keine Bewertungen
- Informe CuadricopteroDokument8 SeitenInforme CuadricopteroRaul Arturo Samaniego TelloNoch keine Bewertungen
- DronDokument14 SeitenDronHector Guioassif Moreira SossaNoch keine Bewertungen
- Informe Proyecto ControlDokument22 SeitenInforme Proyecto ControlAndres Castro VacaNoch keine Bewertungen
- DCA Arias Capel Ordóñez MoraDokument44 SeitenDCA Arias Capel Ordóñez MoraJorge Julián Ordóñez MoraNoch keine Bewertungen
- Control de Brazo Robótico de 5 Grados de LibertadDokument15 SeitenControl de Brazo Robótico de 5 Grados de LibertadVictor CondoriNoch keine Bewertungen
- Autop - Iaticn NTŽ Ižæ Do P C R. 1: I'.Cc - J13'As Dw:Üc-Isx1Is..14 E1Ž Ct..:CaDokument116 SeitenAutop - Iaticn NTŽ Ižæ Do P C R. 1: I'.Cc - J13'As Dw:Üc-Isx1Is..14 E1Ž Ct..:CaBrandon ThompsonNoch keine Bewertungen
- Lectura 17Dokument27 SeitenLectura 17Javier Paico MataNoch keine Bewertungen
- 1770 2012 Rotor Tipo Araña Ipn PDFDokument71 Seiten1770 2012 Rotor Tipo Araña Ipn PDFjorge paezNoch keine Bewertungen
- Ime 076Dokument177 SeitenIme 076ivanortega16RNoch keine Bewertungen
- 19 Analisis y Resultados Experimentales de Controladores deDokument7 Seiten19 Analisis y Resultados Experimentales de Controladores deAndresPrieto10Noch keine Bewertungen
- QuimicaDokument8 SeitenQuimicajosephNoch keine Bewertungen
- Guía 6Dokument4 SeitenGuía 6JosueNoch keine Bewertungen
- Metodos de SintonizadoresDokument19 SeitenMetodos de SintonizadoresAlan Darkness RapNoch keine Bewertungen
- EMILOV - Control de Un Brazo Robot Con Articulaciones ElásticasDokument106 SeitenEMILOV - Control de Un Brazo Robot Con Articulaciones ElásticasHeber Andres GuzmanNoch keine Bewertungen
- Revisión de Literatura Control DronesDokument3 SeitenRevisión de Literatura Control DronesJorge Daniel Gallo SanabriaNoch keine Bewertungen
- Control PID Multivariable de Un Helicóptero de 2-GdL Utilizando Algoritmos EvolutivosDokument6 SeitenControl PID Multivariable de Un Helicóptero de 2-GdL Utilizando Algoritmos EvolutivosRicardo VillalongaNoch keine Bewertungen
- Informe Final CDDokument29 SeitenInforme Final CDJuan Elmer Camarena QuintoNoch keine Bewertungen
- Diseño de Caldera Usando VisualDokument146 SeitenDiseño de Caldera Usando VisualJhon PaulNoch keine Bewertungen
- Paper Fuzzy AscensorDokument4 SeitenPaper Fuzzy AscensorSebastián Alexander Andrade BecerraNoch keine Bewertungen
- Control de Un Helicoptero Con Dos Grados de Libertad Por Medio de Un Controlador Difuso y Un Controlador Por Realimentacion de EstadosDokument2 SeitenControl de Un Helicoptero Con Dos Grados de Libertad Por Medio de Un Controlador Difuso y Un Controlador Por Realimentacion de EstadosA-SanThiago Rojas Llerena100% (1)
- 977 Efe Etp 2340 Ie 017 (Habilitacionscada)Dokument41 Seiten977 Efe Etp 2340 Ie 017 (Habilitacionscada)James Saavedra CastilloNoch keine Bewertungen
- Modelado Del SubmarinoDokument2 SeitenModelado Del SubmarinoFranklin Jara MoncayoNoch keine Bewertungen
- Sistema de información para la operación remota de plantas de generación de energía hidroeléctricaVon EverandSistema de información para la operación remota de plantas de generación de energía hidroeléctricaNoch keine Bewertungen
- Control neuronal y difuso para sistemas fotovoltaicosVon EverandControl neuronal y difuso para sistemas fotovoltaicosNoch keine Bewertungen
- Guía de laboratorio de mecánica de fluidosVon EverandGuía de laboratorio de mecánica de fluidosNoch keine Bewertungen
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoVon EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoBewertung: 5 von 5 Sternen5/5 (1)
- PRIMERDokument1 SeitePRIMERФлавио ПересNoch keine Bewertungen
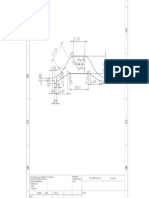
- Pieza 2 Datos FisicosDokument1 SeitePieza 2 Datos FisicosФлавио ПересNoch keine Bewertungen
- Aulas 1 y 2Dokument73 SeitenAulas 1 y 2Флавио ПересNoch keine Bewertungen
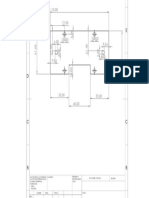
- PIEZA-1 Dise MecaDokument1 SeitePIEZA-1 Dise MecaФлавио ПересNoch keine Bewertungen
- CVtrivenoDokument7 SeitenCVtrivenoФлавио ПересNoch keine Bewertungen
- PZ1Dokument1 SeitePZ1Флавио ПересNoch keine Bewertungen
- Laboratorio 2Dokument3 SeitenLaboratorio 2Флавио ПересNoch keine Bewertungen
- BaseDokument1 SeiteBaseФлавио ПересNoch keine Bewertungen
- Hotel AtixDokument21 SeitenHotel AtixФлавио ПересNoch keine Bewertungen
- Seminario Caratula PerfilDokument1 SeiteSeminario Caratula PerfilDayris AFNoch keine Bewertungen
- SuperiorDokument1 SeiteSuperiorФлавио ПересNoch keine Bewertungen
- A 07Dokument13 SeitenA 07Benji Pineda CoronelNoch keine Bewertungen
- Unidad 2 Filosofía JurídicaDokument6 SeitenUnidad 2 Filosofía JurídicaФлавио ПересNoch keine Bewertungen
- Prac 5Dokument9 SeitenPrac 5Флавио ПересNoch keine Bewertungen
- Carrera de Ingeniería Mecatrónica: Malla Curricular/Gestión 2019Dokument1 SeiteCarrera de Ingeniería Mecatrónica: Malla Curricular/Gestión 2019Флавио ПересNoch keine Bewertungen
- Información Importante!Dokument1 SeiteInformación Importante!Steven RamosNoch keine Bewertungen
- 56 Curriculum Vitae AcademicoDokument1 Seite56 Curriculum Vitae Academicobrenda lizeth cruz hernandez100% (1)
- Clase 7 T (27-08-2018) PDFDokument27 SeitenClase 7 T (27-08-2018) PDFФлавио ПересNoch keine Bewertungen
- Tablas para FisicaDokument3 SeitenTablas para FisicaФлавио ПересNoch keine Bewertungen
- Segundo Parcial Control IIDokument2 SeitenSegundo Parcial Control IIФлавио ПересNoch keine Bewertungen
- Exa TerDokument1 SeiteExa TerФлавио ПересNoch keine Bewertungen
- Artículo Redalyc 10502102 PDFDokument42 SeitenArtículo Redalyc 10502102 PDFZaray LopezNoch keine Bewertungen
- EncuestasDokument2 SeitenEncuestasФлавио ПересNoch keine Bewertungen
- Control de Velocidad de Un Servomotor de CCDokument15 SeitenControl de Velocidad de Un Servomotor de CCScamer RosalesNoch keine Bewertungen
- Phrasal Verbs PDFDokument6 SeitenPhrasal Verbs PDFCharlie GarciaNoch keine Bewertungen
- Lab Oratorio 13Dokument1 SeiteLab Oratorio 13Флавио ПересNoch keine Bewertungen
- CalendarioAcademico PDFDokument2 SeitenCalendarioAcademico PDFTatyRevillaNoch keine Bewertungen
- Concentrado de Tabla de ConversionesDokument5 SeitenConcentrado de Tabla de ConversionesGustavo ValenciaNoch keine Bewertungen
- Arenavirus PDFDokument1 SeiteArenavirus PDFФлавио ПересNoch keine Bewertungen
- Ecualizador 3 Bandas... Filtros 2do OrdenDokument6 SeitenEcualizador 3 Bandas... Filtros 2do OrdenDiego R HernandezNoch keine Bewertungen
- Criterio de RouthDokument9 SeitenCriterio de RouthFabio SplendorNoch keine Bewertungen
- Operatoria DentalDokument15 SeitenOperatoria DentalValeska Farina EspinosaNoch keine Bewertungen
- Cap I. Fisica Ii. ElasticidadDokument70 SeitenCap I. Fisica Ii. ElasticidadomarNoch keine Bewertungen
- Dispersion de RutherfordDokument4 SeitenDispersion de RutherfordJose Tochi EspinozaNoch keine Bewertungen
- 04ASTMC 173-01e1Dokument9 Seiten04ASTMC 173-01e1Orlando Manriquez LNoch keine Bewertungen
- Problemas de La AntroposofíaDokument19 SeitenProblemas de La AntroposofíaNoe MartinezNoch keine Bewertungen
- SolubilidadDokument13 SeitenSolubilidadGeraldine BazanNoch keine Bewertungen
- Norma de Tuberias de Hormigon y Gres INV E-602-07Dokument3 SeitenNorma de Tuberias de Hormigon y Gres INV E-602-07AnabelPradoSNoch keine Bewertungen
- Instalacion Puesta TierraDokument5 SeitenInstalacion Puesta TierraFelipe Rene AucailleNoch keine Bewertungen
- TaladrandoDokument3 SeitenTaladrandoCourtney WilkersonNoch keine Bewertungen
- Informe de Conduccion Axial y RadialDokument17 SeitenInforme de Conduccion Axial y RadialGabriela ThomasNoch keine Bewertungen
- Protocolo RX PeriapicalDokument3 SeitenProtocolo RX PeriapicalCristal de Roca100% (1)
- PRÁCTICADokument4 SeitenPRÁCTICAGerardo WarmerdamNoch keine Bewertungen
- Practica 5Dokument6 SeitenPractica 5Victor E. Chara BustinzaNoch keine Bewertungen
- Ficha UnibaseDokument1 SeiteFicha UnibaseLauraNoch keine Bewertungen
- ET Cables de Cobre Concéntrico - Grupo EPM 11 Marzo 2015Dokument25 SeitenET Cables de Cobre Concéntrico - Grupo EPM 11 Marzo 2015anderson crofortNoch keine Bewertungen
- Informe de Laboratorio Materiales GranuladosDokument44 SeitenInforme de Laboratorio Materiales GranuladosJose Luis Ojeda CarvajalNoch keine Bewertungen
- Agua Caliente SanitariaDokument15 SeitenAgua Caliente SanitariaJose Juarez AlquizarNoch keine Bewertungen
- Guia de Examen TCOyE Unidad 1 MecatronicaDokument2 SeitenGuia de Examen TCOyE Unidad 1 MecatronicaTonathiu QuetzalcoatlNoch keine Bewertungen
- La Electricidad en La Vida Cotidiana: "Circuitos Eléctricos"Dokument27 SeitenLa Electricidad en La Vida Cotidiana: "Circuitos Eléctricos"Alondra PeraltaNoch keine Bewertungen
- Geologia - SulfatosDokument13 SeitenGeologia - SulfatosBill C. FloresNoch keine Bewertungen
- Zodiaco CompletoDokument17 SeitenZodiaco CompletoJesus Antonio Osuna MillanNoch keine Bewertungen
- Informe Final 1Dokument16 SeitenInforme Final 1Carla AndreaNoch keine Bewertungen
- DENSIDADDokument20 SeitenDENSIDADLuami MonteroNoch keine Bewertungen
- Concepto de Flujo Del Campo EléctricoDokument11 SeitenConcepto de Flujo Del Campo EléctricoSERGIO_MAN100% (1)
- PCM, DPCM, DM, AdmDokument2 SeitenPCM, DPCM, DM, AdmDavidNoch keine Bewertungen
- La Acústica de Las Mezquitas y Armas AcusticasDokument13 SeitenLa Acústica de Las Mezquitas y Armas AcusticasSPINMUIRENoch keine Bewertungen
- Guias F-Q IIDokument71 SeitenGuias F-Q IIJulius Giron0% (1)