Das könnte Ihnen auch gefallen
- Aprender Arduino, electrónica y programación con 100 ejercicios prácticosVon EverandAprender Arduino, electrónica y programación con 100 ejercicios prácticosBewertung: 4.5 von 5 Sternen4.5/5 (14)
- 100 circuitos de shields para arduino (español)Von Everand100 circuitos de shields para arduino (español)Bewertung: 3.5 von 5 Sternen3.5/5 (3)
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosVon EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosBewertung: 5 von 5 Sternen5/5 (5)
- Control neuronal y difuso para sistemas fotovoltaicosVon EverandControl neuronal y difuso para sistemas fotovoltaicosNoch keine Bewertungen
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaVon EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaNoch keine Bewertungen
- Apunte para Examen TeoricoDokument126 SeitenApunte para Examen TeoricoTomás SuárezNoch keine Bewertungen
- Química 5to Año PDFDokument161 SeitenQuímica 5to Año PDFcrisar1083% (18)
- Curso Basico S7-200Dokument66 SeitenCurso Basico S7-200Ramiro Victoria Alvarez100% (1)
- Tarea 3 Semana 4 Administracion-1Dokument16 SeitenTarea 3 Semana 4 Administracion-1Daris Elena Lopez SimajNoch keine Bewertungen
- Sistema de información para la operación remota de plantas de generación de energía hidroeléctricaVon EverandSistema de información para la operación remota de plantas de generación de energía hidroeléctricaNoch keine Bewertungen
- Practica 6 PIC16F887Dokument8 SeitenPractica 6 PIC16F887andres_flores_16Noch keine Bewertungen
- Examen - Controladores IndustrialesDokument11 SeitenExamen - Controladores IndustrialesAlan Nuñez100% (1)
- UntitledDokument148 SeitenUntitledKookie ÑamNoch keine Bewertungen
- Fase3 O3Dokument15 SeitenFase3 O3Oscar Mauricio GomezNoch keine Bewertungen
- Modulo PWMDokument6 SeitenModulo PWMpedro_aguilar_43Noch keine Bewertungen
- Dia 1 CALENTAMIENTO GLOBALDokument15 SeitenDia 1 CALENTAMIENTO GLOBALMarvin Alan Guevara AzañedoNoch keine Bewertungen
- Eider SensorDokument7 SeitenEider Sensoreduardo pastor de jesusNoch keine Bewertungen
- Control PID de Velocidad Del Motor DCDokument4 SeitenControl PID de Velocidad Del Motor DCJherson Andrade Tenorio100% (1)
- R5 - CCP - Rodrigo Lopez - Javier Mazas - Guillermo MuñozDokument9 SeitenR5 - CCP - Rodrigo Lopez - Javier Mazas - Guillermo MuñozRODRIGO LOPEZ GUTIERREZNoch keine Bewertungen
- LM35Dokument10 SeitenLM35Rosy Andrea NicolasNoch keine Bewertungen
- Laboratorio 9 Modulo ADC y PWM Con El PIC 16F877ADokument9 SeitenLaboratorio 9 Modulo ADC y PWM Con El PIC 16F877AacajahuaringaNoch keine Bewertungen
- P11 ElectronicaDokument11 SeitenP11 ElectronicaVeronicaNoch keine Bewertungen
- Proyecto Con Microcontrolador Pic16f628a1Dokument13 SeitenProyecto Con Microcontrolador Pic16f628a1Omar Ramirez HerreraNoch keine Bewertungen
- Marco Teorico 1Dokument13 SeitenMarco Teorico 1André Cristhian Canales Canales MezaNoch keine Bewertungen
- Laboratorio 03 Micro - PWMDokument14 SeitenLaboratorio 03 Micro - PWMSilence EngelNoch keine Bewertungen
- Variador de Velocidad AC Con Triac y PICDokument10 SeitenVariador de Velocidad AC Con Triac y PICJose PocomuchaNoch keine Bewertungen
- Informe On OffDokument15 SeitenInforme On Offmanuel tovarNoch keine Bewertungen
- Tema 6 - MicrocontroladoresDokument27 SeitenTema 6 - MicrocontroladoresJULIO CESAR PAMPA MAMANINoch keine Bewertungen
- Control PID de Temperatura Con PIC18F4455Dokument11 SeitenControl PID de Temperatura Con PIC18F4455Oscar Concha RdzNoch keine Bewertungen
- Proyectos Diseño Logico 2016Dokument12 SeitenProyectos Diseño Logico 2016Victor Stiven LizanaNoch keine Bewertungen
- Curso General de Automatas Programables Industriales Omronpdf PDFDokument130 SeitenCurso General de Automatas Programables Industriales Omronpdf PDFLukasNoch keine Bewertungen
- Informe de TermometroDokument17 SeitenInforme de TermometroGenesis Alexandra GonzalezNoch keine Bewertungen
- Fase 2 - Harold DiazDokument21 SeitenFase 2 - Harold DiazalbertoNoch keine Bewertungen
- Practica 8 - Modulación Por Ancho de PulsoDokument10 SeitenPractica 8 - Modulación Por Ancho de PulsoAlejandra OlveraNoch keine Bewertungen
- Informe Lab1 SensoresDokument16 SeitenInforme Lab1 SensoresGuillermo BautistaNoch keine Bewertungen
- Sensor de Temperatura y Contador de RPM Con Microcode Pic1f877aDokument14 SeitenSensor de Temperatura y Contador de RPM Con Microcode Pic1f877aDanny Sixto Armijos LoyolaNoch keine Bewertungen
- AvrDokument15 SeitenAvrOmar BarrionuevoNoch keine Bewertungen
- Informe Practica 4 PDFDokument9 SeitenInforme Practica 4 PDFFranco Pérez MuñozNoch keine Bewertungen
- TP Final Electrónica Digital 2 - Grupo4Dokument14 SeitenTP Final Electrónica Digital 2 - Grupo4Emiliano MarcléNoch keine Bewertungen
- PWM - (Ancho Por Modulación de Pulso) : CompararDokument11 SeitenPWM - (Ancho Por Modulación de Pulso) : CompararAdrianMartinezMendezNoch keine Bewertungen
- Programación C EEPROM RS232 InterrupcionesDokument6 SeitenProgramación C EEPROM RS232 InterrupcionesAl Bajad MamadNoch keine Bewertungen
- PWMDokument13 SeitenPWMIsaac Noyola ManzanoNoch keine Bewertungen
- Grabacion de MicrocontroladoresDokument70 SeitenGrabacion de Microcontroladoresmelvin balladaresNoch keine Bewertungen
- Termostato Digital 04 ING ITE PIT EDokument9 SeitenTermostato Digital 04 ING ITE PIT Emiryam360Noch keine Bewertungen
- Soluciones Ejercicios Tema3 Estudiantes 05 06Dokument30 SeitenSoluciones Ejercicios Tema3 Estudiantes 05 06Milton AlvesNoch keine Bewertungen
- Control TemperaturaDokument12 SeitenControl TemperaturaC. Paolo P.Noch keine Bewertungen
- Comunicación PIC-PC Vía RS232Dokument12 SeitenComunicación PIC-PC Vía RS232Emanuel Ortiz MarinNoch keine Bewertungen
- Informe Laboratorio 2 MicroDokument11 SeitenInforme Laboratorio 2 MicroDavid Paolo Rocha JaureguiNoch keine Bewertungen
- Informe Microprocesadores 1Dokument6 SeitenInforme Microprocesadores 1IvanGomezGNoch keine Bewertungen
- Práctica 04 - Programas Con Entradas y Salidas Analógicas en El ESP32Dokument19 SeitenPráctica 04 - Programas Con Entradas y Salidas Analógicas en El ESP32Gabriela BeltranNoch keine Bewertungen
- Timer 2Dokument5 SeitenTimer 2PierDonneeNoch keine Bewertungen
- Control PID de Un Sensor de Temperatura: InstrumentaciónDokument7 SeitenControl PID de Un Sensor de Temperatura: InstrumentaciónAdriana ZapataNoch keine Bewertungen
- Choper de FrenadoDokument32 SeitenChoper de FrenadoRomulo TorresNoch keine Bewertungen
- Timer PWMDokument9 SeitenTimer PWMIngeniero Jeffer Maya SanchezNoch keine Bewertungen
- Problemas Arduino UNODokument17 SeitenProblemas Arduino UNOJFitTrainer JFitTrainerNoch keine Bewertungen
- PC4 LaboratorioDokument7 SeitenPC4 LaboratorioEdgar Andres Cevallos RamirezNoch keine Bewertungen
- Tema 6 - MicrocontroladoresDokument20 SeitenTema 6 - MicrocontroladoresJulio Cesar Pampa MamaniNoch keine Bewertungen
- Micro PIC16F87Dokument13 SeitenMicro PIC16F87android x xxxNoch keine Bewertungen
- Implementación WilliamDokument21 SeitenImplementación WilliamSoretroath CutNoch keine Bewertungen
- Tema 6 MicrocontroladoresDokument20 SeitenTema 6 MicrocontroladoresWilson CanoNoch keine Bewertungen
- Frecuencimetro Autorango - VHDLDokument10 SeitenFrecuencimetro Autorango - VHDLNathanael CruzNoch keine Bewertungen
- Guia 4 PDFDokument16 SeitenGuia 4 PDFLUIS EDUARDO QUISPE MENDOZANoch keine Bewertungen
- Módulo CCP - Comparador, Captura y PWMDokument10 SeitenMódulo CCP - Comparador, Captura y PWMJose Luis Rosario SalvadorNoch keine Bewertungen
- Guia Metodologica Grupal Individual Byron CarreraDokument20 SeitenGuia Metodologica Grupal Individual Byron CarreraAlejoCarreraNoch keine Bewertungen
- Programación Del PIC16F877Dokument4 SeitenProgramación Del PIC16F877Marcelo OrtizNoch keine Bewertungen
- Taller RAP 4Dokument8 SeitenTaller RAP 4willygonzalez888Noch keine Bewertungen
- Pedidos No EspecialesDokument7 SeitenPedidos No Especialeswillygonzalez888Noch keine Bewertungen
- Capacitacion Normas Bioseguridad Reactivacion LaboratoriosDokument21 SeitenCapacitacion Normas Bioseguridad Reactivacion Laboratorioswillygonzalez888Noch keine Bewertungen
- Constancia Sal DoDokument1 SeiteConstancia Sal Dowillygonzalez888Noch keine Bewertungen
- Prueba PreliminarDokument4 SeitenPrueba Preliminarwillygonzalez888Noch keine Bewertungen
- Pedidos EspecialesDokument8 SeitenPedidos Especialeswillygonzalez888Noch keine Bewertungen
- Colaborativo 1Dokument10 SeitenColaborativo 1willygonzalez888Noch keine Bewertungen
- CPT Cirprotec V CATALOGO DE PRODUCTO PDFDokument68 SeitenCPT Cirprotec V CATALOGO DE PRODUCTO PDFAngelica BarbaraNoch keine Bewertungen
- Competencias Parentales en Educación SexualDokument14 SeitenCompetencias Parentales en Educación SexualSebastianArenasNoch keine Bewertungen
- Narrar Sin FronterasDokument6 SeitenNarrar Sin FronterasManuela PallaresNoch keine Bewertungen
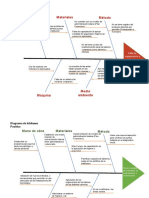
- Diagramas IsickawuaDokument2 SeitenDiagramas IsickawuaGianni VázquezNoch keine Bewertungen
- Documento Proyecto Final (Victor Hugo Montero A.)Dokument116 SeitenDocumento Proyecto Final (Victor Hugo Montero A.)Dario Jose Guacaneme MarquezNoch keine Bewertungen
- Diapositivas Jose María ArguedasDokument14 SeitenDiapositivas Jose María ArguedasEduardo SeguraNoch keine Bewertungen
- Juan José SantibáñezDokument11 SeitenJuan José SantibáñezBere Marón GJ100% (2)
- Metodología de La Investigación I.Cm Quinto KDTE. Guamaní Quishpe Kevin Joel 24/01/2023Dokument4 SeitenMetodología de La Investigación I.Cm Quinto KDTE. Guamaní Quishpe Kevin Joel 24/01/2023Joel GuamaniNoch keine Bewertungen
- Industria de La ConstrucciónDokument2 SeitenIndustria de La ConstrucciónCarlosNoch keine Bewertungen
- MONOGRAFÍA FINAL (Macroeconomía)Dokument14 SeitenMONOGRAFÍA FINAL (Macroeconomía)NOEMI ELIZABETH SOTO AVILANoch keine Bewertungen
- Servicio Autorizado Bosch - Skil - Dremel: Maquina: Pulidora Bosch Gws 24-230 Observaciones: SOLO TRAE LA TUERCADokument1 SeiteServicio Autorizado Bosch - Skil - Dremel: Maquina: Pulidora Bosch Gws 24-230 Observaciones: SOLO TRAE LA TUERCAmaria torresNoch keine Bewertungen
- 11° Formato para Salidas Pedagogicas Ambientales-2Dokument6 Seiten11° Formato para Salidas Pedagogicas Ambientales-2Luz Marina Avila CruzNoch keine Bewertungen
- Caso CafeteríaDokument7 SeitenCaso CafeteríaJohn Walter Yepes CortesNoch keine Bewertungen
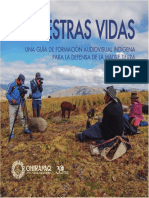
- Nuestras Vidas. Una Guía de Formación Audiovisual IndìgenaDokument114 SeitenNuestras Vidas. Una Guía de Formación Audiovisual IndìgenaCentro de Culturas Indígenas del Perú80% (5)
- Bio Pareyson Imp PDFDokument8 SeitenBio Pareyson Imp PDFeperezmanNoch keine Bewertungen
- Elites GlobalesDokument350 SeitenElites GlobalesAquiles PintoNoch keine Bewertungen
- La Ventana Indiscreta (1954)Dokument3 SeitenLa Ventana Indiscreta (1954)AnnNoch keine Bewertungen
- Clase 1Dokument3 SeitenClase 1AnGie FloNoch keine Bewertungen
- Práctica 1 Simulación ADSDokument3 SeitenPráctica 1 Simulación ADSJOSE ESTUDILLO ALARCONNoch keine Bewertungen
- Antecedentes de La ComputadoraDokument2 SeitenAntecedentes de La ComputadoraProfa. Ivonne RiveraNoch keine Bewertungen
- Protección Radiológica 1Dokument48 SeitenProtección Radiológica 1Konstanza Jara NuñezNoch keine Bewertungen
- MULTIPLOS Y DIVOSORES - 2017 - 1°-Copiar PDFDokument10 SeitenMULTIPLOS Y DIVOSORES - 2017 - 1°-Copiar PDFwilliansifuentesNoch keine Bewertungen
- TblarticulosDokument20 SeitenTblarticulosAna AriNoch keine Bewertungen
- TESIS Propuesta de Mejora en Los Procesos de Gestión PDFDokument175 SeitenTESIS Propuesta de Mejora en Los Procesos de Gestión PDFKaory VélezNoch keine Bewertungen
- Glosario de AnatomiaDokument3 SeitenGlosario de AnatomiaBRISA LIZETT YUPIT ALVAREZNoch keine Bewertungen