Das könnte Ihnen auch gefallen
- MINI PROJET-Ali DahmaneDokument8 SeitenMINI PROJET-Ali DahmaneHØu ÇîNeNoch keine Bewertungen
- Modelisation RE 1 PDFDokument41 SeitenModelisation RE 1 PDFHØu ÇîNeNoch keine Bewertungen
- Tp01 Ben Necib m1 s2Dokument9 SeitenTp01 Ben Necib m1 s2HØu ÇîNeNoch keine Bewertungen
- Examen Avec Solution en Électricité Industrielle-2015Dokument5 SeitenExamen Avec Solution en Électricité Industrielle-2015HØu ÇîNe100% (2)
- Modelisation RE 2 PDFDokument35 SeitenModelisation RE 2 PDFHØu ÇîNe100% (1)
- Travaille Dètaillè de TP 2Dokument2 SeitenTravaille Dètaillè de TP 2HØu ÇîNeNoch keine Bewertungen
- 1 - Fractures GénéralitésDokument134 Seiten1 - Fractures GénéralitészarkaderNoch keine Bewertungen
- TP 01 Bn3laDokument6 SeitenTP 01 Bn3laHØu ÇîNeNoch keine Bewertungen
- Modelisation RE 1Dokument41 SeitenModelisation RE 1HØu ÇîNeNoch keine Bewertungen
- Modelisation RE 2Dokument35 SeitenModelisation RE 2HØu ÇîNeNoch keine Bewertungen
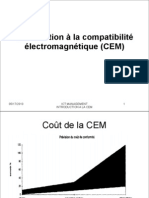
- Introduction À La Compatibilité Électromagnétique (CEM)Dokument319 SeitenIntroduction À La Compatibilité Électromagnétique (CEM)Kawther BenNoch keine Bewertungen
- Solution de TPDokument10 SeitenSolution de TPHØu ÇîNe100% (2)
- Cours MASDokument8 SeitenCours MASHØu ÇîNeNoch keine Bewertungen
- CH1Dokument15 SeitenCH1HØu ÇîNeNoch keine Bewertungen
- 1 - Exam EltDokument3 Seiten1 - Exam EltHØu ÇîNeNoch keine Bewertungen
- 3.moteur Asynchrone PDFDokument51 Seiten3.moteur Asynchrone PDFHicham Bakkali100% (5)
- Crrection ExamenDokument7 SeitenCrrection ExamenHØu ÇîNeNoch keine Bewertungen
- AbdouDokument6 SeitenAbdouHØu ÇîNe0% (1)
- Inductance Propre PDFDokument4 SeitenInductance Propre PDFBOUZ2010Noch keine Bewertungen
- 2826Dokument116 Seiten2826HØu ÇîNeNoch keine Bewertungen
- Electronique AutoDokument13 SeitenElectronique Autoaymendab100% (2)
- Cours Diag AutoDokument116 SeitenCours Diag Auto999hallucination96% (49)
- GlossaireDokument40 SeitenGlossaireGuillaume DentrelleNoch keine Bewertungen
- TP 04Dokument2 SeitenTP 04HØu ÇîNeNoch keine Bewertungen
- Les Emetteurs Notice Sonelgaz PDFDokument60 SeitenLes Emetteurs Notice Sonelgaz PDFHØu ÇîNeNoch keine Bewertungen
- Universite Constantine 1Dokument1 SeiteUniversite Constantine 1HØu ÇîNeNoch keine Bewertungen
- Brochure Simatic-Wincc FRDokument48 SeitenBrochure Simatic-Wincc FRDioss Sadio TraoreNoch keine Bewertungen
- Cours de ProtectionDokument123 SeitenCours de ProtectionYoussef Ultras ✔93% (15)
- Cours de Systemes AsservisDokument82 SeitenCours de Systemes Asserviselectroblida86% (7)
- 2002.vibroflexion PDFDokument11 Seiten2002.vibroflexion PDFBeny AbdouNoch keine Bewertungen
- Cours D'algebre LineaireDokument53 SeitenCours D'algebre Lineairekensonelie01Noch keine Bewertungen
- Fasc Cours4Dokument15 SeitenFasc Cours4Mamadou CoulibalyNoch keine Bewertungen
- MAT165 20152 PlanDokument6 SeitenMAT165 20152 PlanFrancis CNoch keine Bewertungen
- Programme Tron CommunDokument39 SeitenProgramme Tron CommunFarid Bou100% (1)
- Programme BTS - Volume 4 (2023)Dokument652 SeitenProgramme BTS - Volume 4 (2023)Daniel Steve Mendouga100% (1)
- Chap 1 Matrices (NM)Dokument114 SeitenChap 1 Matrices (NM)JT Smoky 242Noch keine Bewertungen
- Cours - Integrales Doubles PDFDokument4 SeitenCours - Integrales Doubles PDFMaitredix100% (1)
- Cours Analyse NumeriqueDokument255 SeitenCours Analyse NumeriqueGerardo GeusaNoch keine Bewertungen
- Geometrie Elementaire de L'espaceDokument10 SeitenGeometrie Elementaire de L'espaceKarime AmineNoch keine Bewertungen
- Systemes Resume de Cours 1Dokument1 SeiteSystemes Resume de Cours 1Adil AdNoch keine Bewertungen
- Déterminants ClassiquesDokument5 SeitenDéterminants ClassiquesMouad Aguëro100% (1)
- 1 CoursDokument61 Seiten1 CoursYahya LahmarNoch keine Bewertungen
- Maintenance industrielle - (BTS - ELE0712) .pdf · إصدار ١Dokument84 SeitenMaintenance industrielle - (BTS - ELE0712) .pdf · إصدار ١Yahiyaoui SofyaneNoch keine Bewertungen
- Cours Math Prepa 08 DeterminantsDokument30 SeitenCours Math Prepa 08 DeterminantsrockenjNoch keine Bewertungen
- Capital Social, Inégalités de Revenus Et Développement Des Jeunes EnfantsDokument290 SeitenCapital Social, Inégalités de Revenus Et Développement Des Jeunes EnfantsFares AbdouNoch keine Bewertungen
- Lahlou s4 Chapitre IDokument43 SeitenLahlou s4 Chapitre IHoucine Nousfi100% (1)
- Algbre CoursDokument35 SeitenAlgbre CoursKaram Nirmine El HatimiNoch keine Bewertungen
- Chapitre1 Ana Num Sys Lin Rappels Matrices 2021 2022Dokument6 SeitenChapitre1 Ana Num Sys Lin Rappels Matrices 2021 2022Nourane BougharriouNoch keine Bewertungen
- Examen SR (2018 19)Dokument2 SeitenExamen SR (2018 19)Elmehdi TalbiNoch keine Bewertungen
- 10tclettre Sys Ex CorDokument8 Seiten10tclettre Sys Ex CorMagatte DiopNoch keine Bewertungen
- S2-Cours4 (Calcul Du Determinant) PDFDokument9 SeitenS2-Cours4 (Calcul Du Determinant) PDFANAAS benooNoch keine Bewertungen
- PMNM ZFDokument75 SeitenPMNM ZFabdoalphaNoch keine Bewertungen
- Cours D'algèbre 2 ECUE 1 (2023-2024)Dokument50 SeitenCours D'algèbre 2 ECUE 1 (2023-2024)autotestentretien.servicesNoch keine Bewertungen
- Examen Fin ModuleDokument9 SeitenExamen Fin Modulesafaa radilNoch keine Bewertungen
- TP Vecteur Propre Et JacobienDokument2 SeitenTP Vecteur Propre Et Jacobienسالمي عبد الرحمن البحرNoch keine Bewertungen
- TP1 - Initiation Au Logiciel MatlabDokument23 SeitenTP1 - Initiation Au Logiciel MatlabImad BenabdouallahNoch keine Bewertungen
- 50 Ans 10Dokument99 Seiten50 Ans 10MahaNoch keine Bewertungen
- Exercises Applications Linéaires, Matrices, DéterminantsDokument18 SeitenExercises Applications Linéaires, Matrices, DéterminantsDANHOUNDO RÉMI100% (1)
- Cours Tenseurs Sept2011Dokument60 SeitenCours Tenseurs Sept2011Saw PouNoch keine Bewertungen