Das könnte Ihnen auch gefallen
- Conners ProfessoresDokument1 SeiteConners Professoressuzana lucas100% (1)
- BMW Esquema EletricoDokument1 SeiteBMW Esquema EletricoRafael Arraes100% (2)
- Roteiro de Entrevista - Modelo IntentusDokument2 SeitenRoteiro de Entrevista - Modelo IntentusPaloma SantosNoch keine Bewertungen
- 824 Edital 01-2024 Convocacao Heteroidentificacao 659877b7d4606Dokument17 Seiten824 Edital 01-2024 Convocacao Heteroidentificacao 659877b7d4606henrique.p.decressenzoNoch keine Bewertungen
- Atividade Contextualizada - SISTEMA DE CONTROLE E QUALIDADE - 01196094 - ENG. MECÂNICA - SÉRGIO HENRIQUE TEIXEIRA MELLODokument2 SeitenAtividade Contextualizada - SISTEMA DE CONTROLE E QUALIDADE - 01196094 - ENG. MECÂNICA - SÉRGIO HENRIQUE TEIXEIRA MELLOSérgio Mello100% (1)
- Teofilo Angelo Dias de SousaDokument132 SeitenTeofilo Angelo Dias de SousaTomas CostaNoch keine Bewertungen
- Apostila Detetive Particular 001Dokument76 SeitenApostila Detetive Particular 001Jhonny Wesker50% (2)
- ExmyDokument615 SeitenExmymanuNoch keine Bewertungen
- Gêneros Televisivos - A TelenovelaDokument6 SeitenGêneros Televisivos - A TelenovelaLeonardo CorrêaNoch keine Bewertungen
- j684 Unitrol 6000 Medium PTDokument2 Seitenj684 Unitrol 6000 Medium PTJulio ReisNoch keine Bewertungen
- ELI DimensionamentoDokument37 SeitenELI Dimensionamentoscorpion-acmNoch keine Bewertungen
- 006 Seletivo Aluno SJR EDITAL #162020Dokument72 Seiten006 Seletivo Aluno SJR EDITAL #162020alvesyan683Noch keine Bewertungen
- Aula I Redação Esa - ParticularDokument4 SeitenAula I Redação Esa - ParticularAndreza RosaNoch keine Bewertungen
- Gol-Saveiro-Parati 1.9dieselDokument9 SeitenGol-Saveiro-Parati 1.9dieselLucas Nascimento LopesNoch keine Bewertungen
- Plano de Gerenciamento de Resíduos Sólidos de GoiásDokument502 SeitenPlano de Gerenciamento de Resíduos Sólidos de GoiásItalo FerreiraNoch keine Bewertungen
- Florais RP CompletoDokument24 SeitenFlorais RP CompletoCleo SilvaNoch keine Bewertungen
- Exercicios 1 - EndocrinologiaDokument7 SeitenExercicios 1 - EndocrinologiavelascofonsecaNoch keine Bewertungen
- Manheim PrincipiosASTDokument10 SeitenManheim PrincipiosASTPriscila QuintelaNoch keine Bewertungen
- Artigo Tratamento de ÁguaDokument7 SeitenArtigo Tratamento de ÁguaGiulia GrandoNoch keine Bewertungen
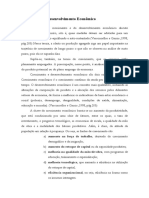
- Crescimento e Desenvolvimento EconomicoDokument4 SeitenCrescimento e Desenvolvimento EconomicoGustavo TonettoNoch keine Bewertungen
- Ficha de Trabalho EquaçõesDokument10 SeitenFicha de Trabalho EquaçõesEmilia ReisNoch keine Bewertungen
- 10 - PROVA - Pref. Encruzilhada Do Sul - RS - 2016Dokument8 Seiten10 - PROVA - Pref. Encruzilhada Do Sul - RS - 2016Julianna FagundesNoch keine Bewertungen
- 5 - Como Dormir Com Qualquer Mulher Que Você Quiser - Franco SeductionDokument63 Seiten5 - Como Dormir Com Qualquer Mulher Que Você Quiser - Franco SeductionRodrigo Martins Gonçalves de Siqueira0% (1)
- ABNT NBR 6024 2012 - Informação e Documentação - Numeração Progressiva Das Seções de Um Documento - Apresentação PDFDokument8 SeitenABNT NBR 6024 2012 - Informação e Documentação - Numeração Progressiva Das Seções de Um Documento - Apresentação PDFAlexandre Rossignoli ZanettiNoch keine Bewertungen
- DISSERTAÇAO Rafael Machado Do LivramentoDokument143 SeitenDISSERTAÇAO Rafael Machado Do LivramentoRafael MachadoNoch keine Bewertungen
- Fichamento Ideologia Alemã - MarxDokument22 SeitenFichamento Ideologia Alemã - MarxDenner DantasNoch keine Bewertungen
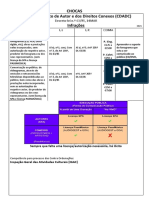
- Chocas Direito de AutorDokument3 SeitenChocas Direito de AutorAthomikNoch keine Bewertungen
- Lista 3Dokument4 SeitenLista 3ghdfgNoch keine Bewertungen
- Rochas MetamórficasDokument15 SeitenRochas MetamórficasjoaoNoch keine Bewertungen
- Biblioteconomia Alexandria em Chamas FichamentoDokument9 SeitenBiblioteconomia Alexandria em Chamas FichamentoOlivia DiasNoch keine Bewertungen