Das könnte Ihnen auch gefallen
- Mantenimiento Bomba PedroloDokument1 SeiteMantenimiento Bomba PedroloJefferson Negreiros PoloNoch keine Bewertungen
- BELCOS-QA-2MAY2098-PROTO-0067 - Contrastación de Instrumentos de Nivel - R1Dokument1 SeiteBELCOS-QA-2MAY2098-PROTO-0067 - Contrastación de Instrumentos de Nivel - R1Jefferson Negreiros PoloNoch keine Bewertungen
- Mantenimiento Bomba PedroloDokument1 SeiteMantenimiento Bomba PedroloJefferson Negreiros PoloNoch keine Bewertungen
- BELCOS-QA-2MAY2098-PROTO-0069 - Registro de Prueba de Lazo de Instrumentos - R0Dokument1 SeiteBELCOS-QA-2MAY2098-PROTO-0069 - Registro de Prueba de Lazo de Instrumentos - R0Jefferson Negreiros PoloNoch keine Bewertungen
- BelCos-QA-2MAY2098-PROTO-0037 - Inspección de Conexionado de Cables - R0Dokument2 SeitenBelCos-QA-2MAY2098-PROTO-0037 - Inspección de Conexionado de Cables - R0Jefferson Negreiros PoloNoch keine Bewertungen
- Constanciadetraccion PDFDokument1 SeiteConstanciadetraccion PDFJefferson Negreiros PoloNoch keine Bewertungen
- Metrado de SoldaduraDokument3 SeitenMetrado de SoldaduraJefferson Negreiros PoloNoch keine Bewertungen
- Relacion de Personal PDFDokument1 SeiteRelacion de Personal PDFJefferson Negreiros PoloNoch keine Bewertungen
- FICHAS PARRILLAS 38X38X38 38x38x25Dokument2 SeitenFICHAS PARRILLAS 38X38X38 38x38x25Jefferson Negreiros PoloNoch keine Bewertungen
- Memoria de Calculo - Tanque Ptar CosapiDokument12 SeitenMemoria de Calculo - Tanque Ptar CosapiJefferson Negreiros PoloNoch keine Bewertungen
- Cv. Vasquez Angeles RCDokument25 SeitenCv. Vasquez Angeles RCJefferson Negreiros PoloNoch keine Bewertungen
- Brochure Multiservicios Generales NDTDokument6 SeitenBrochure Multiservicios Generales NDTJefferson Negreiros PoloNoch keine Bewertungen
- Programa para Calcular El Numero de Máquinas y Número de TaladrosDokument3 SeitenPrograma para Calcular El Numero de Máquinas y Número de TaladrosJefferson Negreiros PoloNoch keine Bewertungen
- Escaleras de IngresoDokument1 SeiteEscaleras de IngresoJefferson Negreiros PoloNoch keine Bewertungen
- Proyecto de Investigacion - EdithDokument28 SeitenProyecto de Investigacion - EdithJefferson Negreiros PoloNoch keine Bewertungen
- Proyecto de Investigacion - EdithDokument28 SeitenProyecto de Investigacion - EdithJefferson Negreiros PoloNoch keine Bewertungen
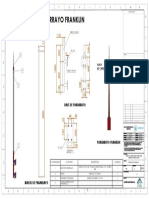
- Soporte de PararrayoDokument1 SeiteSoporte de PararrayoJefferson Negreiros PoloNoch keine Bewertungen
- Plano de Soporteria de CanaletaDokument1 SeitePlano de Soporteria de CanaletaJefferson Negreiros PoloNoch keine Bewertungen
- Empres AsDokument3 SeitenEmpres AsJefferson Negreiros PoloNoch keine Bewertungen
- Caso PracticoDokument2 SeitenCaso PracticoLuisa Maria Correa RuizNoch keine Bewertungen
- Manual GLPIDokument8 SeitenManual GLPICaleb Aparicio HerreraNoch keine Bewertungen
- 4° Grado - Actividad Del Dia 20 de JulioDokument27 Seiten4° Grado - Actividad Del Dia 20 de JulioCARO CHERRES VILELA DE REATEGUINoch keine Bewertungen
- Comparación Entre El Código Civil de Vélez y El Nuevo Código Civil y Comercial. Cuestiones de MatrimonioDokument2 SeitenComparación Entre El Código Civil de Vélez y El Nuevo Código Civil y Comercial. Cuestiones de MatrimonioJuanjo IbañezNoch keine Bewertungen
- Resumen Deus Caritas EstDokument2 SeitenResumen Deus Caritas Estmiki_clon60% (5)
- InterbankDokument2 SeitenInterbankCarlosNoch keine Bewertungen
- Frases Comunes en El Idioma KaqchikelDokument36 SeitenFrases Comunes en El Idioma KaqchikelSotz Beatriz50% (14)
- Buenas Practicas de Abastecimiento para RetailDokument5 SeitenBuenas Practicas de Abastecimiento para RetailClaudiaNoch keine Bewertungen
- Her BarioDokument17 SeitenHer Barioleidy massiel fortuna vargasNoch keine Bewertungen
- Análisis Urológicos de LaboratorioDokument18 SeitenAnálisis Urológicos de LaboratorioCrisotomo PerdomoNoch keine Bewertungen
- Programacion Tesela Lengua y Literatura 1 BACH Pais VascDokument71 SeitenProgramacion Tesela Lengua y Literatura 1 BACH Pais VascIsmael NavarroNoch keine Bewertungen
- Album Textos FuncionalesDokument7 SeitenAlbum Textos FuncionalesElizabeth ZunigaNoch keine Bewertungen
- Reptiles de Chile Donoso-Barros 1966Dokument605 SeitenReptiles de Chile Donoso-Barros 1966Helen Diaz-Paez100% (8)
- Capitulo 2Dokument3 SeitenCapitulo 2Frank Deivid Rosales BernaNoch keine Bewertungen
- Guía Taller Psicólogía - Reconocimiento y Cuidados Del CuerpoDokument2 SeitenGuía Taller Psicólogía - Reconocimiento y Cuidados Del CuerpoJENNIFER PAOLA HERNANDEZ ESPINOSANoch keine Bewertungen
- Perdonar WebDokument9 SeitenPerdonar WebJose PenaNoch keine Bewertungen
- Simulacro Parcial 1 PDFDokument2 SeitenSimulacro Parcial 1 PDFDaniela CorreaNoch keine Bewertungen
- De Aprendizaje: ActividadesDokument2 SeitenDe Aprendizaje: ActividadesPaola Game'sNoch keine Bewertungen
- Ensayo Relaciones HumanasDokument10 SeitenEnsayo Relaciones HumanasMiguel GlzNoch keine Bewertungen
- Plan de Trabajo Barrio El PeñonDokument34 SeitenPlan de Trabajo Barrio El PeñonDon Daniel100% (1)
- Ejercicios Factores Conversion-Hoja 1 PDFDokument2 SeitenEjercicios Factores Conversion-Hoja 1 PDFJavier ML100% (5)
- Cuadro Comparativo Balanza Comercial de La RegionDokument8 SeitenCuadro Comparativo Balanza Comercial de La RegionWilf MorenoNoch keine Bewertungen
- Introduccion A La Termodinamica 2016-OkDokument39 SeitenIntroduccion A La Termodinamica 2016-OkMiguel CuaresmaNoch keine Bewertungen
- Prueba Prohibida y Prueba IlícitaDokument12 SeitenPrueba Prohibida y Prueba Ilícitarevisa1960Noch keine Bewertungen
- Nociones de Derecho TributarioDokument116 SeitenNociones de Derecho TributarioRandall FlaggNoch keine Bewertungen
- Carrasquer, Félix - Las Colectividades de Aragón. Un Vivir Autogestionado Promesa de Futuro - (Ed. Descontrol. Barcelona. 2016)Dokument355 SeitenCarrasquer, Félix - Las Colectividades de Aragón. Un Vivir Autogestionado Promesa de Futuro - (Ed. Descontrol. Barcelona. 2016)Fernando García MoralesNoch keine Bewertungen
- Documento 5Dokument8 SeitenDocumento 5luis sanchezNoch keine Bewertungen
- Escala Abreviada de DesarrolloDokument63 SeitenEscala Abreviada de DesarrolloJoaquin Enrique Sepulveda Aravena100% (1)
- Marin MersenneDokument4 SeitenMarin Mersennenaibk2Noch keine Bewertungen
- 5) Zapatos de DescargaDokument10 Seiten5) Zapatos de DescargaMai PyonNoch keine Bewertungen