Das könnte Ihnen auch gefallen
- Guía de Actividades y Rúbrica de Evaluación - Tarea 1 Funciones de Varias Variables y Diferenciació NDokument10 SeitenGuía de Actividades y Rúbrica de Evaluación - Tarea 1 Funciones de Varias Variables y Diferenciació NJose Antonio Deaza Amaya100% (1)
- Virus Respiratorio Sincitial Bovino (VRSB)Dokument11 SeitenVirus Respiratorio Sincitial Bovino (VRSB)SolanoFigueroa100% (1)
- GESTIÓN PARA REDUCIR LAS Incidencias, Desviaciones Y NO CONFORMIDADES DE LA CALIDADDokument36 SeitenGESTIÓN PARA REDUCIR LAS Incidencias, Desviaciones Y NO CONFORMIDADES DE LA CALIDADmiku mis100% (1)
- PROTO PISANI - Tutela Jurisdiccional DiferenciadaDokument16 SeitenPROTO PISANI - Tutela Jurisdiccional DiferenciadaEduardo Gandulfo100% (1)
- Solucion Numerica de Ecuaciones Lineales 2023Dokument8 SeitenSolucion Numerica de Ecuaciones Lineales 2023O.r. FaureNoch keine Bewertungen
- Examen Mat1203 1 2019Dokument9 SeitenExamen Mat1203 1 2019VALENTINA CARVAJALNoch keine Bewertungen
- Algebra 2022 Uba Xxi 2do ParcialDokument5 SeitenAlgebra 2022 Uba Xxi 2do ParcialSool GonzalezNoch keine Bewertungen
- Examen 22 01 2022 ResueltoDokument8 SeitenExamen 22 01 2022 Resueltod66rnw4ydfNoch keine Bewertungen
- Tarea2 SolnDokument6 SeitenTarea2 SolnAaron Santiago CardenasNoch keine Bewertungen
- MateIII20231 ParcialSolucionarioDokument4 SeitenMateIII20231 ParcialSolucionarioLuis Antonio Basagoitia VásquezNoch keine Bewertungen
- Tarea 1 FuncionesDokument11 SeitenTarea 1 FuncionesXimena GuerraNoch keine Bewertungen
- Ayudantia 01 BDokument4 SeitenAyudantia 01 BKatherine Martinez DiazNoch keine Bewertungen
- Álgebra Lineal - PEC2 - AL1 - 2022 - 23Dokument4 SeitenÁlgebra Lineal - PEC2 - AL1 - 2022 - 23MonCap MaríaNoch keine Bewertungen
- Parcial1 Tarea2Dokument4 SeitenParcial1 Tarea2Axel Julio Cesar Solis Ruiz (student)100% (1)
- Departamento de Matemáticas Bachillerato 2B 2H Recuperación ÁlgebraDokument2 SeitenDepartamento de Matemáticas Bachillerato 2B 2H Recuperación ÁlgebraMARINA GAMBÍN CEREZONoch keine Bewertungen
- Prueba de Nivelacion Prerrequisitos FM 2020 21 SolucionesDokument10 SeitenPrueba de Nivelacion Prerrequisitos FM 2020 21 SolucionesIker LandabereaNoch keine Bewertungen
- Examen y SolucionDokument6 SeitenExamen y SolucionPeterNoch keine Bewertungen
- 1 Parcial 08 09Dokument11 Seiten1 Parcial 08 09viceNoch keine Bewertungen
- Aplicacion de Diagonalizacion de MatricesDokument10 SeitenAplicacion de Diagonalizacion de MatricesRaúl Romero TámaraNoch keine Bewertungen
- 4 Informe PrevioDokument16 Seiten4 Informe PrevioRodrigo Arriaga TarquiNoch keine Bewertungen
- Resuelto Tema - 3Dokument5 SeitenResuelto Tema - 3Orochi SuarezNoch keine Bewertungen
- Solución 1PCDokument5 SeitenSolución 1PCJose AlcantaraNoch keine Bewertungen
- Tema5.3-Minimos Cuadrados y Formas CuadraticasDokument10 SeitenTema5.3-Minimos Cuadrados y Formas CuadraticasSerxio GarcíaNoch keine Bewertungen
- Retroalimentacion de EstadosDokument25 SeitenRetroalimentacion de EstadosLeazah Adacnom SoretsellabNoch keine Bewertungen
- Examen Diagnóstico MecánicaDokument11 SeitenExamen Diagnóstico MecánicaOso PolNoch keine Bewertungen
- Guía de Ejercicios: Miguel Ángel Muñoz JaraDokument7 SeitenGuía de Ejercicios: Miguel Ángel Muñoz Jaramario veraNoch keine Bewertungen
- Control 2 SolucionDokument4 SeitenControl 2 SolucionAlberto SerranoNoch keine Bewertungen
- Función CuadráticaDokument11 SeitenFunción CuadráticaRodrigoNoch keine Bewertungen
- AyGA-2C2022-Practica Evaluación 1°PDokument1 SeiteAyGA-2C2022-Practica Evaluación 1°PleulietmaitenaNoch keine Bewertungen
- Taller 4 - Metodos NumericosDokument4 SeitenTaller 4 - Metodos NumericosAlberto Lagos100% (1)
- Algebra Febrero19ADokument3 SeitenAlgebra Febrero19AHaritz Adrián ServeraNoch keine Bewertungen
- Solución PS04F2Dokument7 SeitenSolución PS04F2victoria huayamaveNoch keine Bewertungen
- Familia de RectasDokument3 SeitenFamilia de RectasSong Eun WooNoch keine Bewertungen
- Solucion16 06Dokument8 SeitenSolucion16 06marianoespartaco69Noch keine Bewertungen
- Algebra 111Dokument2 SeitenAlgebra 111Camilo Cepeda UgaldeNoch keine Bewertungen
- Examen Sustitutorio 21 BDokument2 SeitenExamen Sustitutorio 21 BJuangjNoch keine Bewertungen
- Tipo de Ejercicios 4 Integral DefinidaDokument11 SeitenTipo de Ejercicios 4 Integral DefinidaJOHANNA PORRASNoch keine Bewertungen
- Examen Final Control III 2022-IDokument3 SeitenExamen Final Control III 2022-I¿De Dónde Soy? Nose xdNoch keine Bewertungen
- La Recta, La Parábola y La HiperbolaDokument9 SeitenLa Recta, La Parábola y La HiperbolaMarly Salinas AriasNoch keine Bewertungen
- 2020 Junio Examen y Solucion 1Dokument5 Seiten2020 Junio Examen y Solucion 1PeterNoch keine Bewertungen
- Capítulo 5Dokument25 SeitenCapítulo 5jesusNoch keine Bewertungen
- Cap 6 - Pseudoinversa y Minimos Cuadrados-2012-2016Dokument2 SeitenCap 6 - Pseudoinversa y Minimos Cuadrados-2012-2016CarlosNoch keine Bewertungen
- Variables de Estado DiscretaDokument11 SeitenVariables de Estado Discretajimena3330Noch keine Bewertungen
- Anexo 1 - Ejercicios Tarea 2 JuanDokument7 SeitenAnexo 1 - Ejercicios Tarea 2 JuanJuan david Rey sanchezNoch keine Bewertungen
- La Recta en El EspacioDokument5 SeitenLa Recta en El Espacioarthur5927Noch keine Bewertungen
- 2004-2005 SeptiembreDokument2 Seiten2004-2005 SeptiembreSara GaonaNoch keine Bewertungen
- Algebra Ejercicios 10, 11, 12Dokument5 SeitenAlgebra Ejercicios 10, 11, 12Nathaly Daniela RamirezNoch keine Bewertungen
- Espacios Con Producto EscalarDokument2 SeitenEspacios Con Producto EscalarRuben FraguelNoch keine Bewertungen
- Resueltos Tema 3 Con PortadaDokument9 SeitenResueltos Tema 3 Con PortadaJorge Curto MartinNoch keine Bewertungen
- 2007 04 Extraordinario Madrid Matematicas II EDokument2 Seiten2007 04 Extraordinario Madrid Matematicas II EPi Pi314Noch keine Bewertungen
- C13 Valores Vectores PropiosDokument37 SeitenC13 Valores Vectores PropiosGonzalo Salvador GuevaraNoch keine Bewertungen
- Tarea 2Dokument12 SeitenTarea 2Juan David GómezNoch keine Bewertungen
- Mali1 U3 A2 V1 GemcDokument9 SeitenMali1 U3 A2 V1 GemcViollet Cruz100% (1)
- Opción ADokument5 SeitenOpción AAnton ChurikovNoch keine Bewertungen
- Splines CúblicosDokument12 SeitenSplines CúblicosFacundoNoch keine Bewertungen
- Modelo Examen RESUELTO-EBAU-Matematicas IIDokument5 SeitenModelo Examen RESUELTO-EBAU-Matematicas IIBlanca Collado TorañoNoch keine Bewertungen
- Modelo de Parcial Algebra UBA XXI 6Dokument3 SeitenModelo de Parcial Algebra UBA XXI 6Martín BustamanteNoch keine Bewertungen
- Clase 11Dokument4 SeitenClase 11andres achoteNoch keine Bewertungen
- Rudin IntroduccionDokument29 SeitenRudin IntroduccionBernardo ToledoNoch keine Bewertungen
- ÁlgebraDokument3 SeitenÁlgebraOmar MoyaNoch keine Bewertungen
- Sistema HomogeneoDokument4 SeitenSistema HomogeneoDaniel Peña SaenzNoch keine Bewertungen
- 2oBachCC EBAU Aragon 2021-Extraordinaria Resuelto JuanAntonioMGDokument17 Seiten2oBachCC EBAU Aragon 2021-Extraordinaria Resuelto JuanAntonioMGperezperezlucia28Noch keine Bewertungen
- Presa BovedaDokument13 SeitenPresa BovedaJorge Perez GarciaNoch keine Bewertungen
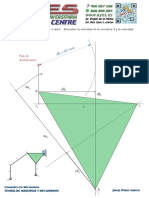
- Simulacro Examen Cinematica 1718 Solucion VelocDokument1 SeiteSimulacro Examen Cinematica 1718 Solucion VelocJorge Perez GarciaNoch keine Bewertungen
- Tmm18 Practica5 Winmecc VelocidadesDokument1 SeiteTmm18 Practica5 Winmecc VelocidadesJorge Perez GarciaNoch keine Bewertungen
- Simulacro Examen Cinematica 1718 Solucion AcelDokument1 SeiteSimulacro Examen Cinematica 1718 Solucion AcelJorge Perez GarciaNoch keine Bewertungen
- ArmadurasDokument37 SeitenArmadurasJorge Perez Garcia100% (2)
- Segundo Parcial Resistencia de MaterialesDokument8 SeitenSegundo Parcial Resistencia de MaterialesJorge Perez Garcia0% (1)
- Estatica SRDokument4 SeitenEstatica SRJorge Perez GarciaNoch keine Bewertungen
- Examenes AlgoritmicoDokument35 SeitenExamenes AlgoritmicoJorge Perez GarciaNoch keine Bewertungen
- Carga Barco ContenedoresDokument3 SeitenCarga Barco ContenedoresJorge Perez GarciaNoch keine Bewertungen
- 5EjProba 11-12 PDFDokument18 Seiten5EjProba 11-12 PDFJorge Perez Garcia0% (1)
- Combinación Mancomunal de Obreros de AntofagastaDokument22 SeitenCombinación Mancomunal de Obreros de AntofagastaCarlos TolozaNoch keine Bewertungen
- Quien Dijo ZapalloDokument44 SeitenQuien Dijo ZapalloViKyta Velez100% (1)
- Guia - de - Aprendizaje4 Manipulacion de AlimentosDokument6 SeitenGuia - de - Aprendizaje4 Manipulacion de AlimentosnattyNoch keine Bewertungen
- Como Vas A Matar Tu GiganteDokument5 SeitenComo Vas A Matar Tu GiganteEdy Edgardo Diaz LopezNoch keine Bewertungen
- Electrolitos Que Tienen Una Funcion FisiologicaDokument2 SeitenElectrolitos Que Tienen Una Funcion FisiologicaJosahany CastilloNoch keine Bewertungen
- VARGAS-VILLABA-HIDROCARBUROS AROMATICOS-ejerciciosDokument27 SeitenVARGAS-VILLABA-HIDROCARBUROS AROMATICOS-ejerciciosMilagros De La CruzNoch keine Bewertungen
- Apuntes y Tablas - Diseño de Correa y PoleaDokument10 SeitenApuntes y Tablas - Diseño de Correa y PoleaDanny Alexander LazNoch keine Bewertungen
- Convergencia (Henry Jenkins)Dokument13 SeitenConvergencia (Henry Jenkins)LuAlcantaraNoch keine Bewertungen
- PEC4 2023 Psicología Personalidad y Diferencias IndividualesDokument8 SeitenPEC4 2023 Psicología Personalidad y Diferencias IndividualesMarta Alonso LealNoch keine Bewertungen
- Sistema Reproductor y Pubertad: UnidadDokument26 SeitenSistema Reproductor y Pubertad: UnidadAnonymous GtGSAPtSNoch keine Bewertungen
- Bonilla Katherin U1T3a1Dokument3 SeitenBonilla Katherin U1T3a1bonillakatherin288Noch keine Bewertungen
- Posesivos en El PerúDokument8 SeitenPosesivos en El PerúJJNoch keine Bewertungen
- PPT - LAVADO DE MANOS - MANUAL CAP. AS - Rev. 18.02.2022Dokument17 SeitenPPT - LAVADO DE MANOS - MANUAL CAP. AS - Rev. 18.02.2022META4 YARINACOCHANoch keine Bewertungen
- Mapa Conceptual Ética A NicómacoDokument2 SeitenMapa Conceptual Ética A NicómacoFernanda Fuentes100% (2)
- Hoja de Ensayo IEC61850 - vDEF - ESPAÑOL PDFDokument6 SeitenHoja de Ensayo IEC61850 - vDEF - ESPAÑOL PDFDiego FelipeNoch keine Bewertungen
- Tratamiento QuimicoDokument4 SeitenTratamiento QuimicoSheler Perez NzNoch keine Bewertungen
- Formato de EntrevistaDokument20 SeitenFormato de EntrevistaGabriela melissa PerezNoch keine Bewertungen
- Azim UtsDokument10 SeitenAzim UtsAlex Flores AbadNoch keine Bewertungen
- Legislacion Mercantil Carlos Gutierrez 1Dokument17 SeitenLegislacion Mercantil Carlos Gutierrez 1felipe gonzalezNoch keine Bewertungen
- Viñeta Inis BeagDokument3 SeitenViñeta Inis BeagRubénGuillermoQuinteroNoch keine Bewertungen
- Calidad de Servicio y Satisfaccion Del Cliente Del Banco de La Nacion Agencia 2 Huaraz, Periodo 2014 PDFDokument124 SeitenCalidad de Servicio y Satisfaccion Del Cliente Del Banco de La Nacion Agencia 2 Huaraz, Periodo 2014 PDFCristianGuerreroAgueroNoch keine Bewertungen
- Teorías de La Conducta HumanaDokument7 SeitenTeorías de La Conducta HumanaYARLEICI ROMAÑANoch keine Bewertungen
- AutoevaluacionDokument2 SeitenAutoevaluacionRony A QuispeNoch keine Bewertungen
- Proyecto CIBERDokument16 SeitenProyecto CIBERLorenzo Baez Hernandez0% (1)
- Analisis Multicriterio Aplicado A Lo AmbientalDokument7 SeitenAnalisis Multicriterio Aplicado A Lo Ambientalivanv89100% (1)
- El Origen Del Estado MexicanoDokument5 SeitenEl Origen Del Estado MexicanoArturo Gonzalez100% (1)
- Caso SonotechDokument15 SeitenCaso SonotechMarylois78% (9)